|
37)
|
el apéndice 12 se modifica como sigue:
|
a)
|
el índice se modifica como sigue:
|
i)
|
tras el punto 1.1 se inserta el punto 1.1.1 siguiente:
|
|
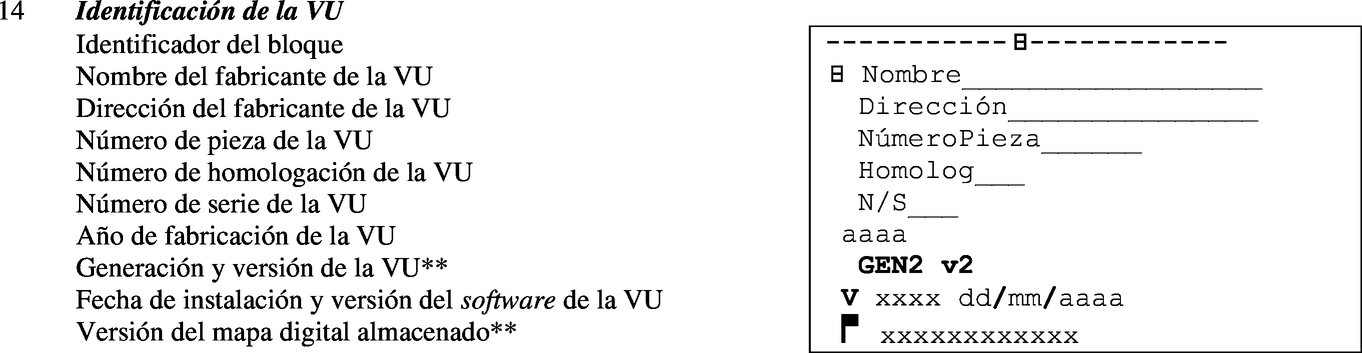
ii)
|
el punto 2 se sustituye por el texto siguiente:
|
«2.
|
CARACTERÍSTICAS BÁSICAS DEL RECEPTOR GNSS»;
|
|
|
iii)
|
el punto 3 se sustituye por el texto siguiente:
|
«3.
|
SECUENCIAS PROPORCIONADAS POR EL RECEPTOR GNSS»;
|
|
|
iv)
|
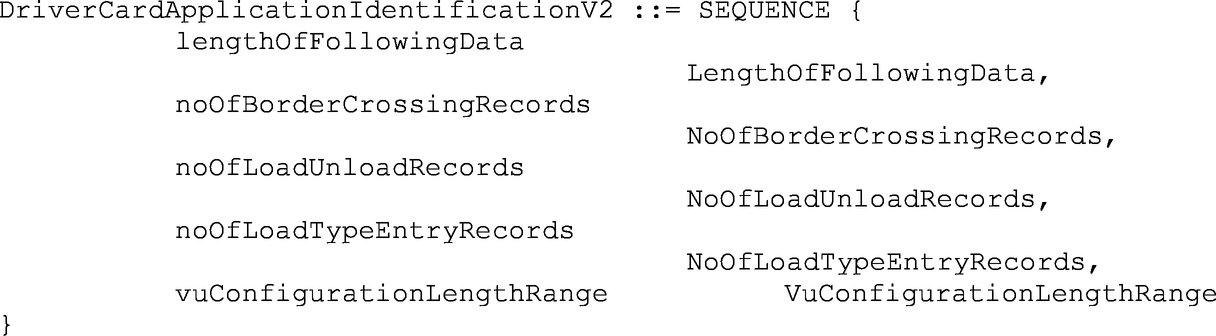
se insertan los puntos 4.2.4 y 4.2.5 siguientes:
|
«4.2.4
|
Estructura del comando WriteRecord
|
|
|
v)
|
el punto 5.2 se sustituye por el texto siguiente:
|
«5.2.
|
Transferencia de información del receptor GNSS a la VU»;
|
|
|
vi)
|
se suprime el punto 5.2.1;
|
|
vii)
|
se insertan los puntos 5.3, 5.4 y 5.4.1 siguientes:
|
«5.3.
|
Transferencia de información de la VU al receptor GNSS
|
|
5.4.
|
Gestión de errores
|
5.4.1
|
Ausencia de información sobre la posición procedente del receptor GNSS»;
|
|
|
|
viii)
|
los puntos 6 y 7 se sustituyen por los siguientes:
|
«6.
|
PROCESAMIENTO Y REGISTRO DE LOS DATOS DE POSICIÓN POR LA VU
|
|
7.
|
CONFLICTO TEMPORAL DEL GNSS»;
|
|
|
ix)
|
se añade el punto 8 siguiente:
|
«8.
|
CONFLICTO DE MOVIMIENTO DEL VEHÍCULO»;
|
|
|
|
b)
|
el punto 1 se modifica como sigue:
|
i)
|
el texto antes del gráfico 1 se sustituye por el texto siguiente:
«1. INTRODUCCIÓN
El presente apéndice recoge los requisitos técnicos relativos al receptor GNSS y los datos del GNSS empleados por la unidad instalada en el vehículo, incluidos los protocolos que deben aplicarse para garantizar una transferencia de datos segura y correcta de la información sobre el posicionamiento.
1.1. Ámbito de aplicación
|
GNS_1
|
La unidad instalada en el vehículo recabará datos de localización de al menos una red de satélites GNSS.
La unidad instalada en el vehículo podrá incluir o no un dispositivo GNSS externo, tal y como se indica en el gráfico 1:»;
|
|
|
ii)
|
tras el punto 1.1 se inserta el punto 1.1.1 siguiente:
|
«1.1.1
|
Referencias
En esta parte del presente apéndice se utilizan las siguientes referencias:
|
NMEA
|
NMEA (National Marine Electronics Association [asociación nacional de electrónica marina]) 0183 Interface Standard, V4.11»;
|
|
|
|
iii)
|
en el punto 1.2 se añaden los acrónimos siguientes:
|
«OSNMA
|
Galileo Open Service Navigation Message Authentication (autenticación de mensajes de navegación del servicio abierto de Galileo)
|
|
RTC
|
Real Time Clock (reloj de tiempo real)
|
»;
|
|
|
c)
|
el punto 2 se modifica como sigue:
|
i)
|
el encabezamiento se sustituye por el texto siguiente:
|
«2.
|
CARACTERÍSTICAS BÁSICAS DEL RECEPTOR GNSS»;
|
|
|
ii)
|
el punto GNS_3 se sustituye por el texto siguiente:
|
«GNS_3
|
El receptor GNSS deberá poder admitir la autenticación de mensajes de navegación en el servicio abierto de Galileo (OSNMA).»;
|
|
|
iii)
|
se añaden los puntos GNS_3a a GNS_3g siguientes:
|
«GNS_3a
|
El receptor GNSS realizará una serie de comprobaciones de coherencia para verificar que las mediciones que ha computado basándose en los datos de la OSNMA han generado una información correcta sobre la posición, la velocidad y los datos del vehículo y, por lo tanto, no han sido afectadas por ningún ataque externo, por ejemplo la interceptación y retransmisión con retardo (meaconing). Estas comprobaciones de coherencia consistirán, por ejemplo, en lo siguiente:
|
—
|
detección de emisiones de potencia anormal mediante la monitorización combinada del control automático de ganancia y la relación de portadora a densidad de ruido (C/N0),
|
|
—
|
coherencia de la medición de los pseudorrangos y coherencia de la medición Doppler en el tiempo, en especial la detección de saltos bruscos en la medición,
|
|
—
|
técnicas de receptor con supervisión autónoma de la integridad, en especial la detección de mediciones incoherentes con la posición estimada,
|
|
—
|
comprobaciones de la posición y la velocidad, en particular las soluciones anormales de posición y velocidad, los saltos repentinos y el comportamiento incoherente con la dinámica del vehículo,
|
|
—
|
coherencia de la hora y la frecuencia, en especial los saltos y las derivas del reloj que no son coherentes con las características del reloj del receptor.
|
|
|
GNS_3b
|
La Comisión Europea elaborará y aprobará los documentos siguientes:
|
—
|
Un documento de control de la interfaz de señal en el espacio (SIS ICD, Signal in Space Interface Control Document), en el que se detalle la información OSNMA transmitida en la señal Galileo.
|
|
—
|
Las Directrices OSNMA para los receptores, que contendrán los requisitos y los procesos necesarios para que los receptores garanticen una ejecución segura de la OSNMA, así como recomendaciones para mejorar el rendimiento de esta.
|
Los receptores GNSS instalados en los tacógrafos, ya sean internos o externos, deberán construirse de acuerdo con el SIS ICD y con las Directrices OSNMA para los receptores.
|
|
GNS_3c
|
El receptor GNSS proporcionará mensajes de posición, denominados en el presente anexo y sus apéndices “mensajes de posición autenticados”, que se elaboran utilizando exclusivamente satélites que emiten mensajes de navegación cuya autenticidad ha sido correctamente verificada.
|
|
GNS_3d
|
El receptor GNSS proporcionará asimismo mensajes de posición estándar elaborados utilizando los satélites a la vista, estén autenticados o no.
|
|
GNS_3e
|
El receptor GNSS utilizará el reloj de tiempo real (RTC) de la VU como referencia horaria en la sincronización de la hora que es necesaria para la OSNMA.
|
|
GNS_3f
|
La VU proporcionará la hora de su RTC al receptor GNSS.
|
|
GNS_3g
|
La VU proporcionará al receptor GNSS la desviación máxima de la hora especificada en el requisito 41 del anexo I C, junto con la hora de su RTC.»;
|
|
|
|
d)
|
el punto 3 se sustituye por el texto siguiente:
|
«3.
|
SECUENCIAS PROPORCIONADAS POR EL RECEPTOR GNSS
En este punto se describen las secuencias utilizadas en el funcionamiento del tacógrafo inteligente para transmitir mensajes de posición estándar y autenticados. Este punto es aplicable tanto a la configuración de tacógrafo inteligente con dispositivo GNSS externo como sin él.
|
GNS_4
|
Los datos de posición estándar se basan en la secuencia NMEA de datos específicos mínimos recomendados (RMC, Recommended Minimum Specific) del GNSS, que contiene la información sobre la posición (latitud y longitud), la hora en formato UTC (hhmmss.ss) y la velocidad sobre tierra en nudos, además de valores adicionales.
El formato de la secuencia RMC es el siguiente (según la norma NMEA V4.11):

$--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a,a,a*hh
|
2)
|
Estado, A = Posición válida, V = Advertencia
|
|
7)
|
Velocidad sobre tierra en nudos
|
|
8)
|
Ruta seguida, grados verdaderos
|
|
10)
|
Variación magnética, grados
|
|
12)
|
Indicador de modo FAA
|
El estado de navegación es opcional y puede no estar presente en la secuencia RMC.
El estado indica si se dispone de señal GNSS. Los datos recibidos (por ejemplo, hora o latitud/longitud) no podrán utilizarse para registrar la posición del vehículo en la VU hasta que el estado tenga “A” como valor.
La resolución de la posición se basa en el formato de la secuencia RMC anteriormente descrita. La primera parte de los campos 3 y 5 sirve para representar los grados. El resto se emplea para representar los minutos con tres decimales. Por consiguiente, la resolución es de 1/1 000 de minuto o 1/60 000 de grado (puesto que un minuto es 1/60 de un grado).
|
|
GNS_4a
|
Los datos de posición autenticados se basan en una secuencia similar a NMEA, “datos específicos mínimos autenticados” (AMC, Authenticated Minimum Specific), que contiene la información sobre la posición (latitud y longitud), la hora en formato UTC (hhmmss.ss) y la velocidad sobre tierra en nudos, además de valores adicionales.
El formato de la secuencia AMC es el siguiente (según la norma NMEA V4.11, salvo con respecto al valor número 2):

$--AMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a,a,a*hh
|
2)
|
Estado, A= posición autenticada (establecida utilizando por lo menos cuatro satélites que emiten mensajes de navegación cuya autenticidad ha sido correctamente verificada), J= jamming (interferencia intencionada) u O= otro ataque al GNSS en ausencia de una autenticación fallida de los mensajes de navegación (mediante comprobaciones de coherencia realizadas conforme a GNS_3a), F= autenticación fallida de los mensajes de navegación (detectada por las verificaciones OSNMA especificadas en los documentos mencionados en GNS_3b), V= vacío (posición autenticada no disponible por cualquier otra razón)
|
|
7)
|
Velocidad sobre tierra en nudos
|
|
8)
|
Ruta seguida, grados verdaderos
|
|
10)
|
Variación magnética, grados
|
|
12)
|
Indicador de modo FAA
|
El estado de navegación es opcional y puede no estar presente en la secuencia AMC.
El estado indica si se dispone de una posición GNSS autenticada, si se ha detectado un ataque sobre las señales GNSS, si ha fallado la autenticación de los mensajes de navegación o si la posición GNSS está vacía. Cuando el valor del estado no es “A”, los datos recibidos (por ejemplo, hora o latitud/longitud) no se consideran válidos y no pueden utilizarse para registrar la posición del vehículo en la VU. Cuando el valor del estado es “J” (jamming), “O” (otro ataque al GNSS) o “F” (autenticación fallida de los mensajes de navegación), se registrará en la VU un incidente de anomalía del GNSS, según se define en el anexo I C y el apéndice 1 (EventFaultCode).
|
|
GNS_5
|
La unidad instalada en el vehículo almacenará en su base de datos la información de posición relativa a la latitud y a la longitud con una resolución de 1/10 de minuto o 1/600 de grado, tal y como se describe en el apéndice 1 para el tipo GeoCoordinates.
La VU puede utilizar el comando GPS DOP y satélites activos (GSA), conforme a la norma NMEA V4.11, para determinar y registrar la disponibilidad de la señal y la exactitud de las posiciones estándar. En concreto, la dilución horizontal de la precisión (HDOP) se emplea para facilitar una indicación del nivel de exactitud de los datos de localización registrados (véase el punto 4.2.2). La VU almacenará el valor de la HDOP calculado como el mínimo de los valores HDOP recogidos en los sistemas GNSS disponibles.
El identificador GNSS indica el identificador NMEA correspondiente a cada constelación GNSS y a cada sistema de aumentación basado en satélites (SBAS, Satellite-Based Augmentation System).

$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x,a*hh
|
3)
|
Identificador del primer satélite utilizado para la posición definida
|
|
4)
|
Identificador del segundo satélite utilizado para la posición definida
|
…
|
14)
|
Identificador del duodécimo satélite utilizado para la posición definida
|
|
18)
|
Identificador del sistema
|
El identificador del sistema es opcional y puede no estar presente en la secuencia GSA.
Igualmente, la VU puede utilizar la secuencia similar a NMEA “comando de satélites activos autenticados” (ASA, authenticated active satellites) para determinar y registrar la disponibilidad de la señal y la exactitud de las posiciones autenticadas. Los valores 1 a 18 se definen en la norma NMEA V4.11.

$--ASA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x,a*hh
|
3)
|
Identificador del primer satélite utilizado para la posición definida
|
|
4)
|
Identificador del segundo satélite utilizado para la posición definida
|
…
|
14)
|
Identificador del duodécimo satélite utilizado para la posición definida
|
|
18)
|
Identificador del sistema
|
El identificador del sistema es opcional y puede no estar presente en la secuencia ASA.
|
|
GNS_6
|
Cuando se utilice un dispositivo GNSS externo, la secuencia GSA se almacenará en el transceptor seguro GNSS con los números de registro “02” a “06”, y la secuencia ASA se almacenará con los números de registro “12” a “16”.
|
|
GNS_7
|
El tamaño máximo de las secuencias (por ejemplo, RMC, AMC, GSA, ASA u otras) que pueden emplearse para medir el comando de lectura del registro será de 85 bytes (véase la tabla 1).»;
|
|
|
|
e)
|
el punto 4 se modifica como sigue:
|
i)
|
en el punto 4.1.1, el punto GNS_9 se modifica como sigue:
|
1)
|
el texto antes de la letra b) se sustituye por el texto siguiente:
|
«GNS_9
|
El dispositivo GNSS externo estará formado por los siguientes componentes (véase el gráfico 6):
|
a)
|
Un receptor GNSS comercial que facilite los datos de posición a través de la interfaz de datos GNSS. Por ejemplo, la interfaz de datos GNSS puede corresponder a la norma NMEA V4.11, de modo que el receptor GNSS actúe como emisor y transmita secuencias NMEA al transceptor seguro GNSS con una frecuencia de 1 Hz para el conjunto predefinido de secuencias NMEA y similares a NMEA, que debe incluir al menos las secuencias RMC, AMC, GSA y ASA. Serán los fabricantes del dispositivo GNSS externo quienes decidan aplicar la interfaz de datos GNSS.»;
|
|
|
|
2)
|
(no afecta a la versión española)
|
|
|
ii)
|
el punto 4.2.1 se modifica como sigue:
|
1)
|
el punto GNS_14 se sustituye por el texto siguiente:
|
«GNS_14
|
El protocolo de comunicación entre el dispositivo GNSS externo y la unidad instalada en el vehículo deberá admitir las siguientes funciones:
|
1.
|
recogida y distribución de datos GNSS (por ejemplo, posición, hora y velocidad);
|
|
2.
|
recogida de los datos de configuración del dispositivo GNSS externo;
|
|
3.
|
protocolo de administración para admitir el acoplamiento, la autenticación mutua y el acuerdo de la clave de la sesión entre el dispositivo GNSS externo y la VU;
|
|
4.
|
transmisión al dispositivo GNSS externo de la hora del RTC de la VU y de la diferencia máxima entre la hora verdadera y la hora del RTC de la VU.»;
|
|
|
|
2)
|
se inserta el siguiente punto tras el punto GNS_18:
|
«GNS_18a
|
En relación con la función 4, “transmisión al dispositivo GNSS externo de la hora del RTC de la VU y de la diferencia máxima entre la hora verdadera y la hora del RTC de la VU”, el transceptor seguro GNSS utilizará un EF (EF VU) en el mismo DF con un identificador de archivo igual a “2F30”, según se indica en la tabla 1.»;
|
|
|
3)
|
se inserta el siguiente punto tras el punto GNS_19:
|
«GNS_19a
|
El transceptor seguro GNSS almacenará los datos procedentes de la VU en el EF VU. Se trata de un archivo de registro lineal de longitud fija con un identificador igual a “2F30” en formato hexadecimal.»;
|
|
|
4)
|
en el punto GNS_20, el párrafo primero se sustituye por el texto siguiente:
|
«GNS_20
|
El transceptor seguro GNSS utilizará una memoria para almacenar los datos y podrá realizar tantos ciclos de lectura/escritura como sean necesarios durante una vida útil de por lo menos quince años. A excepción de este elemento, el diseño interno y la aplicación del transceptor seguro GNSS queda en manos de los fabricantes.»;
|
|
|
5)
|
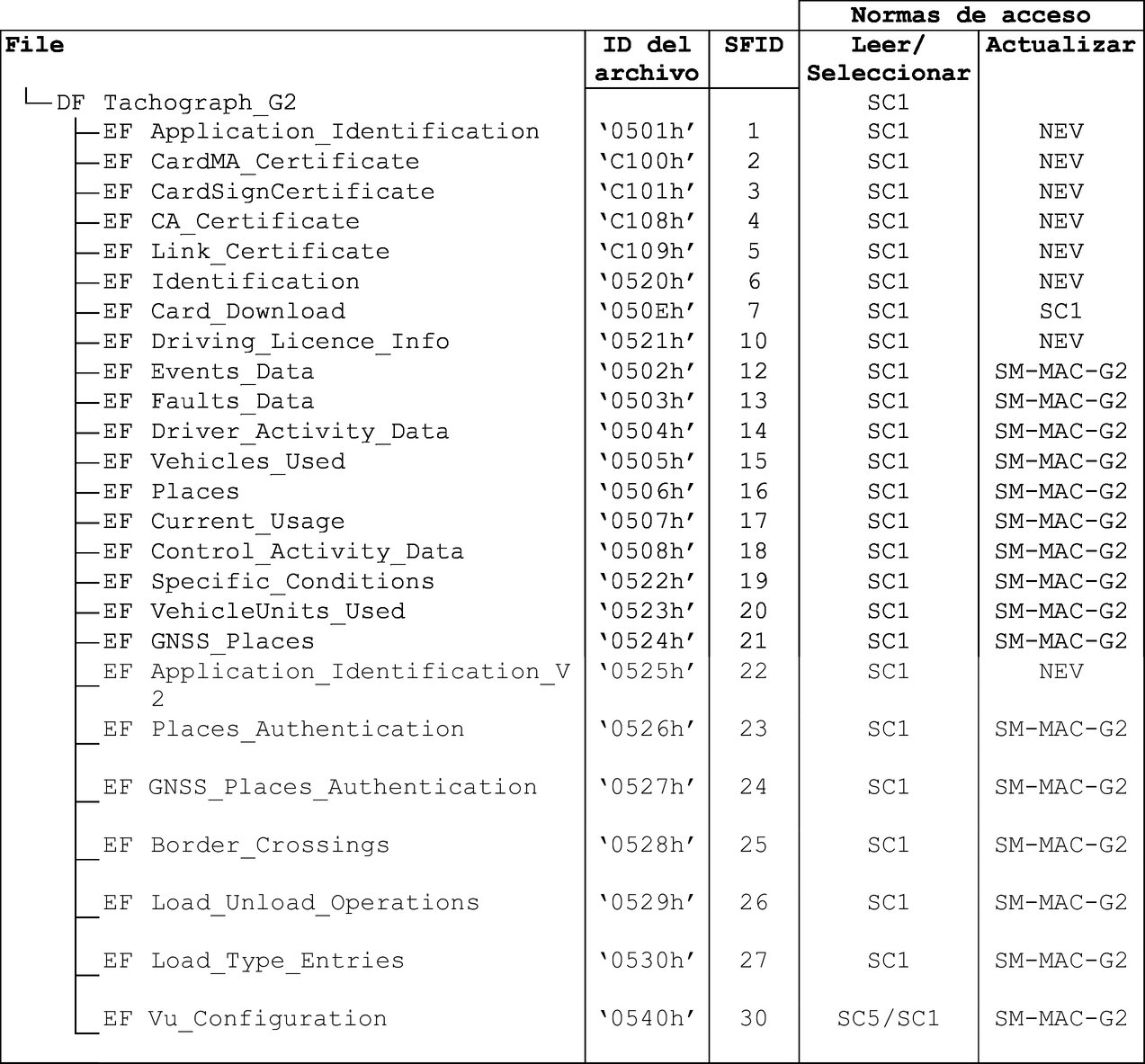
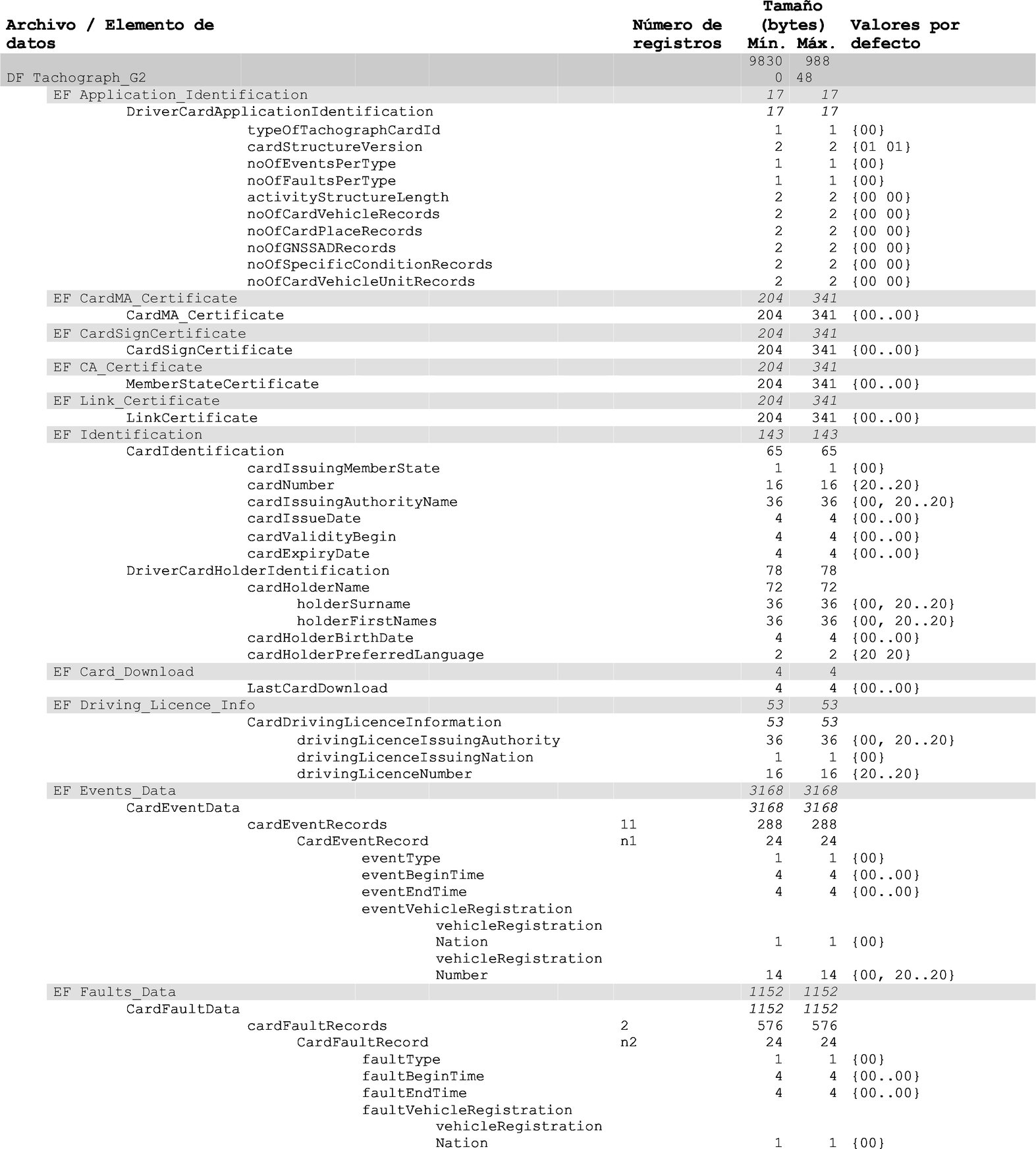
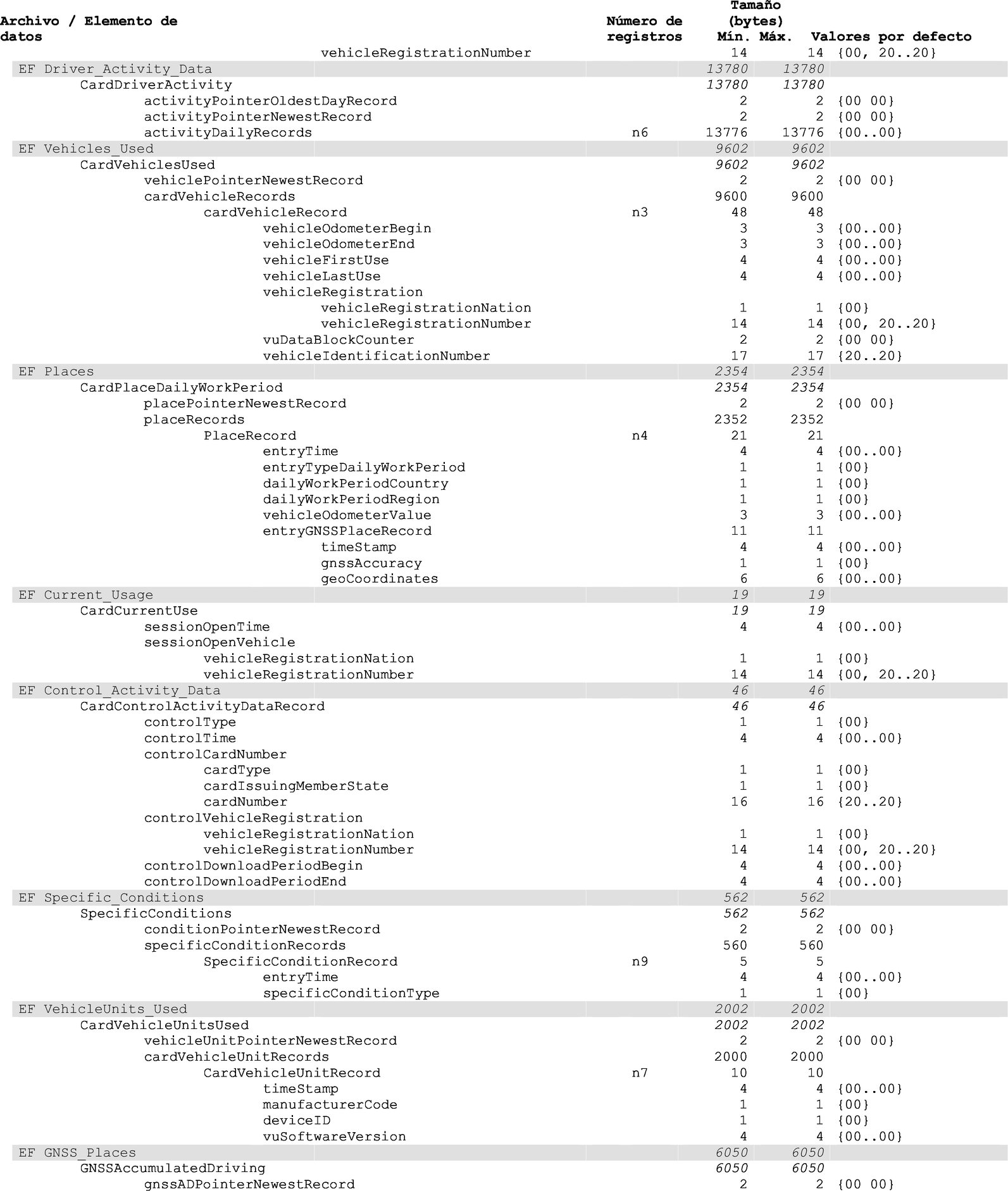
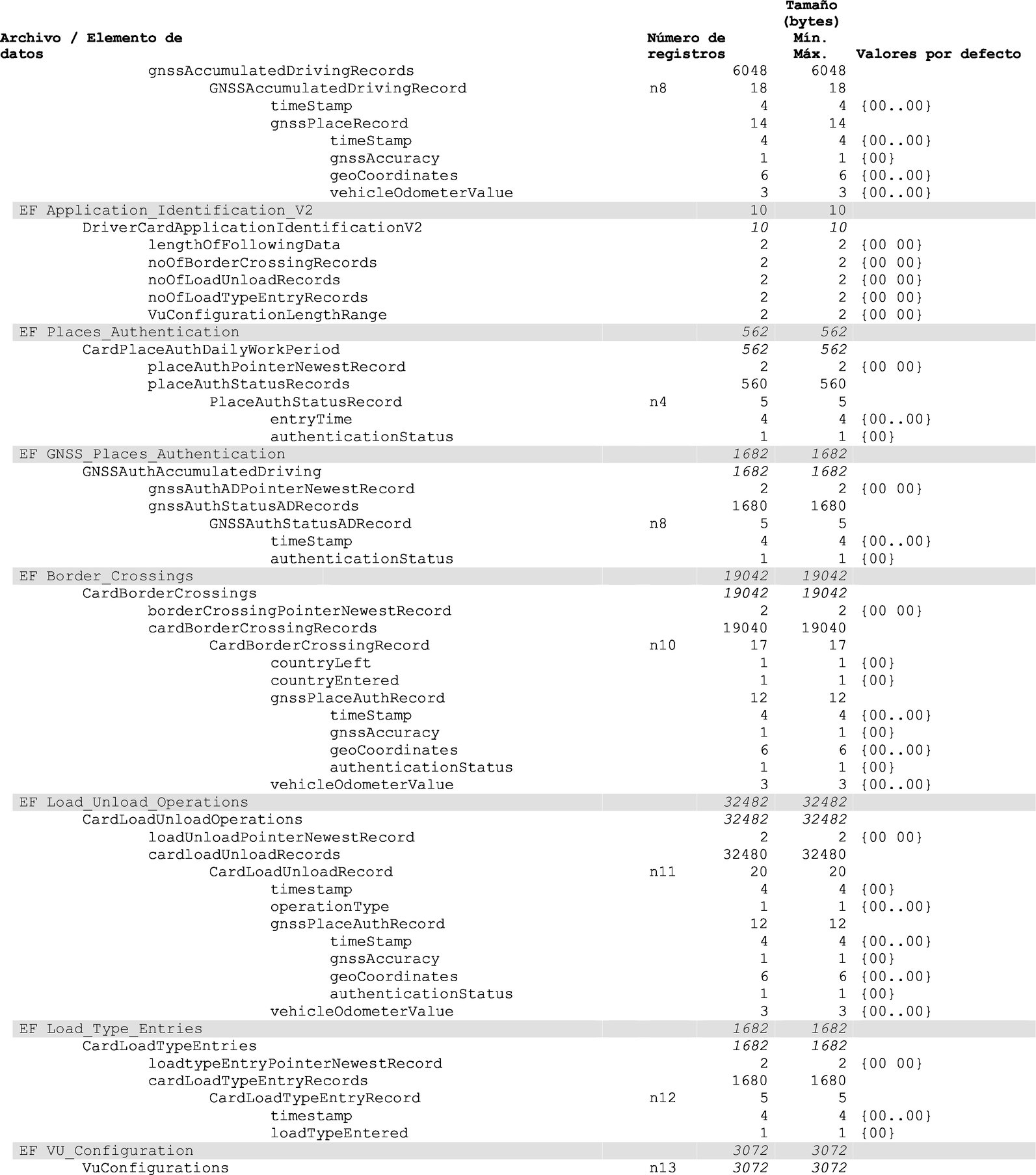
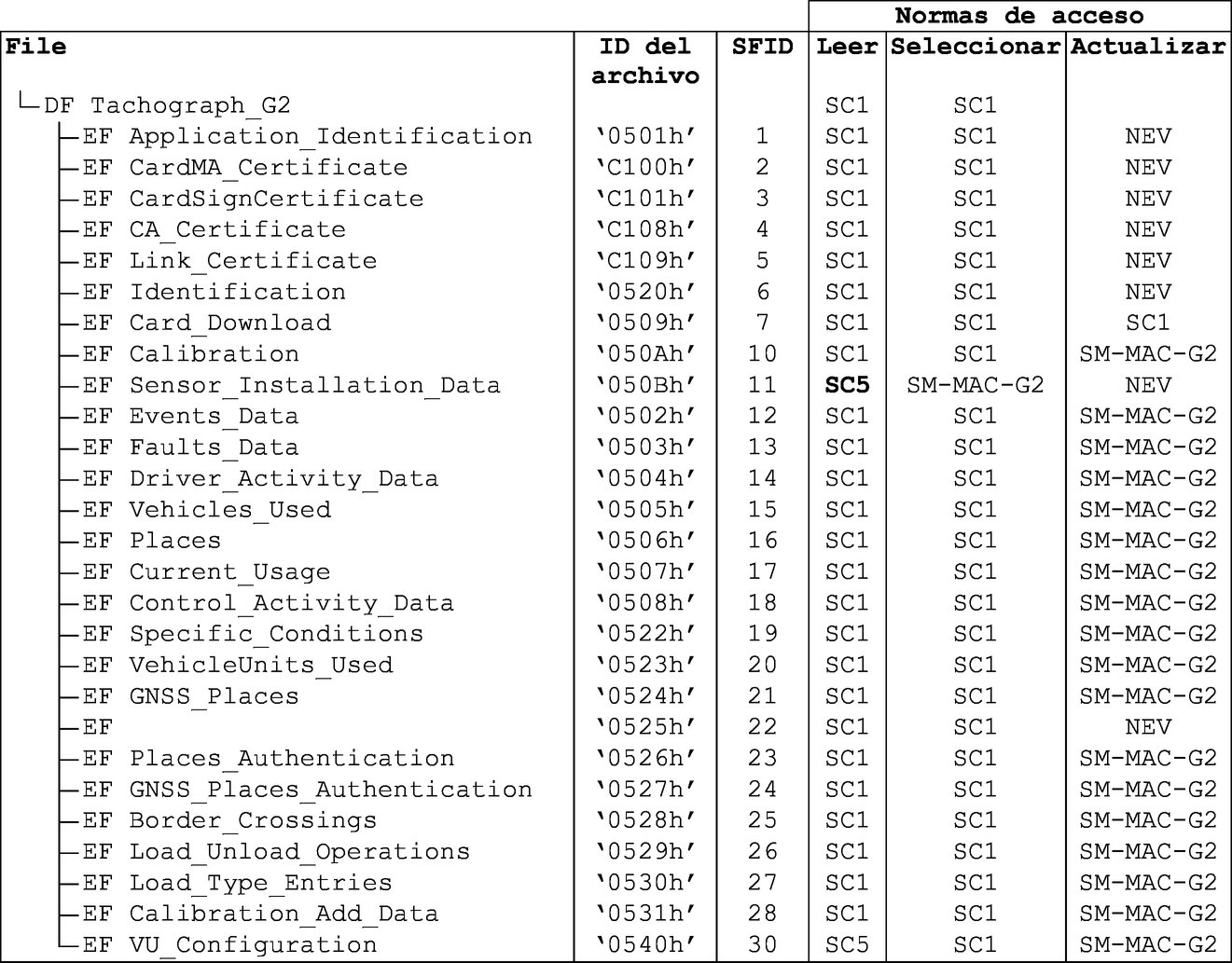
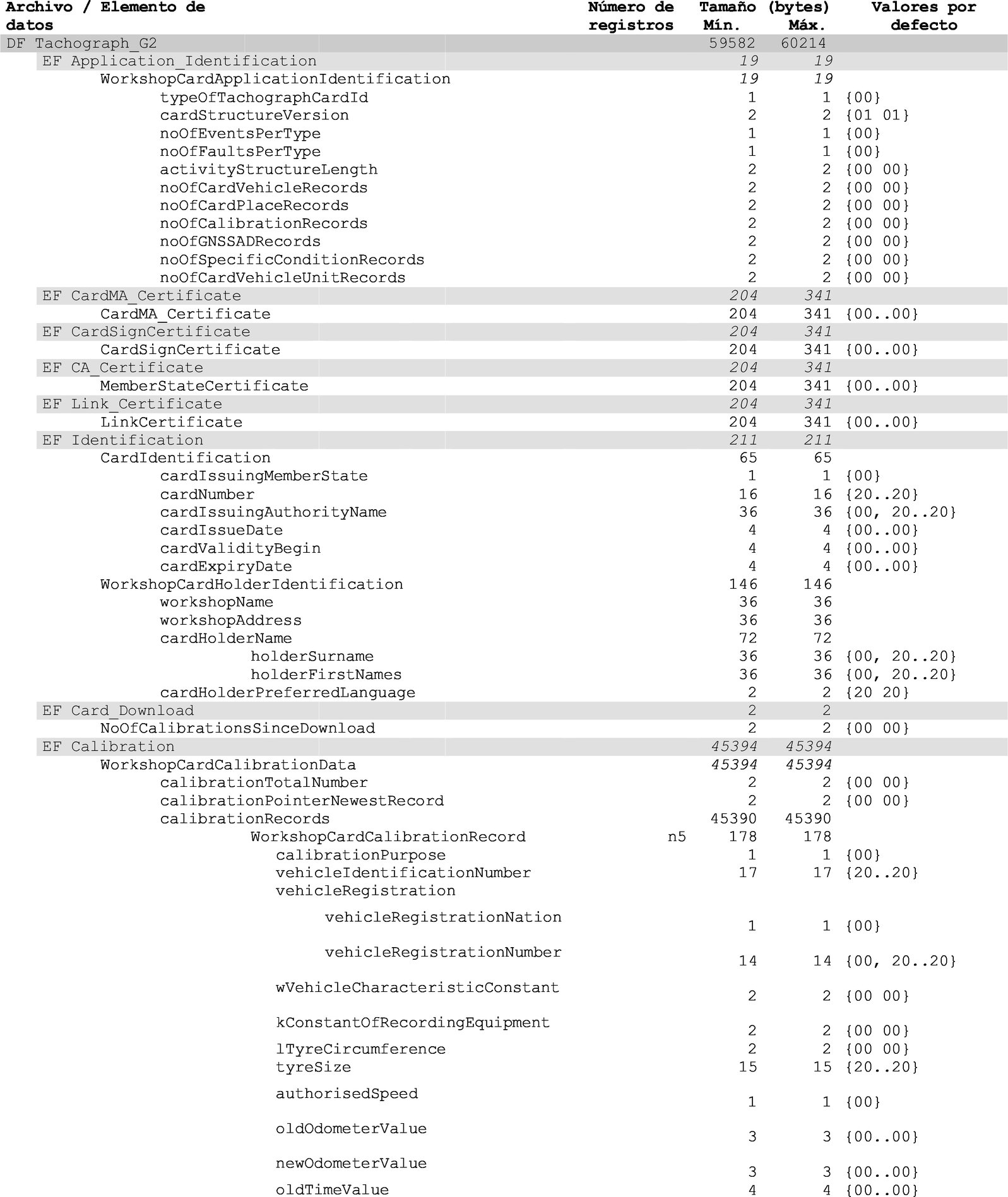
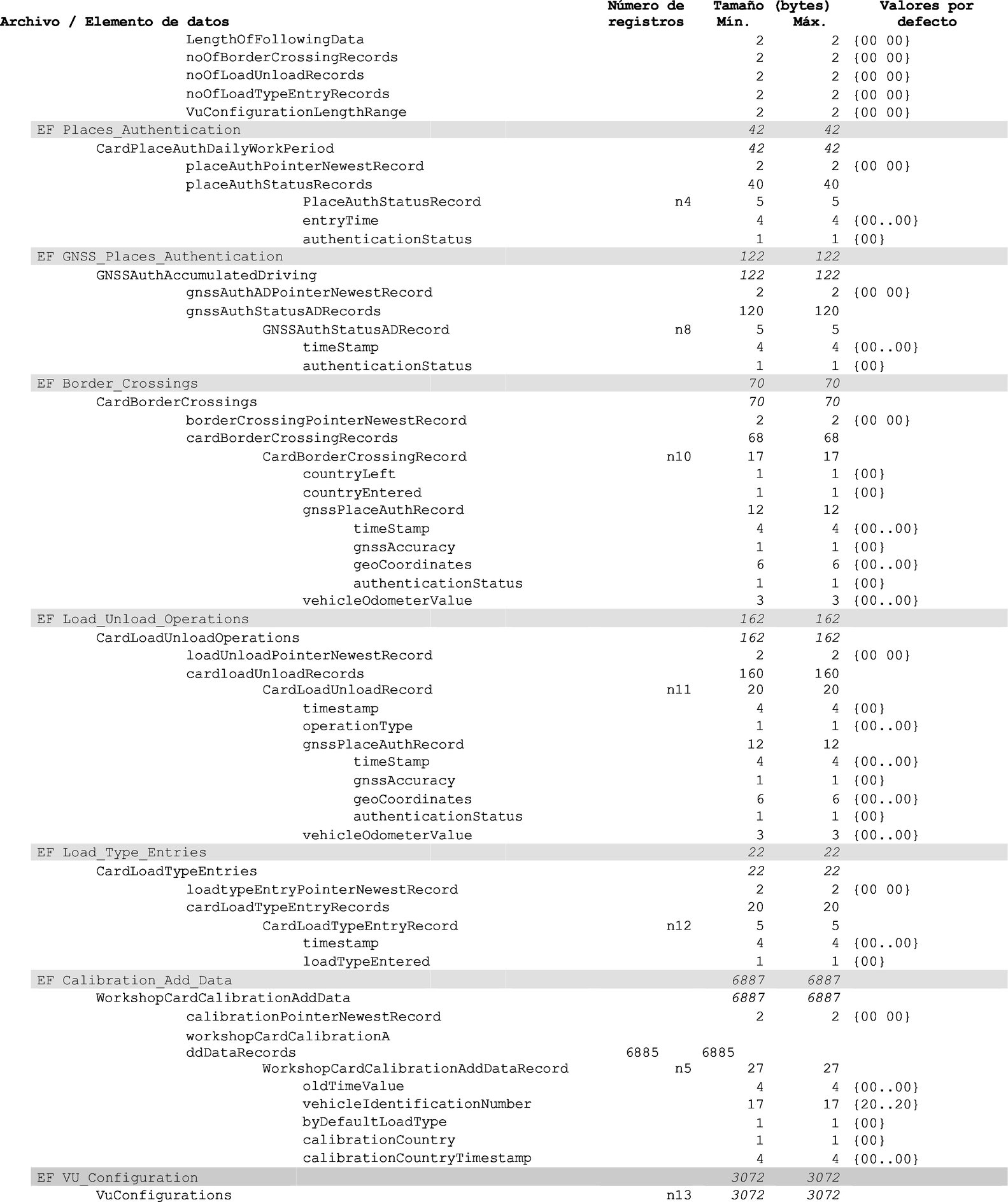
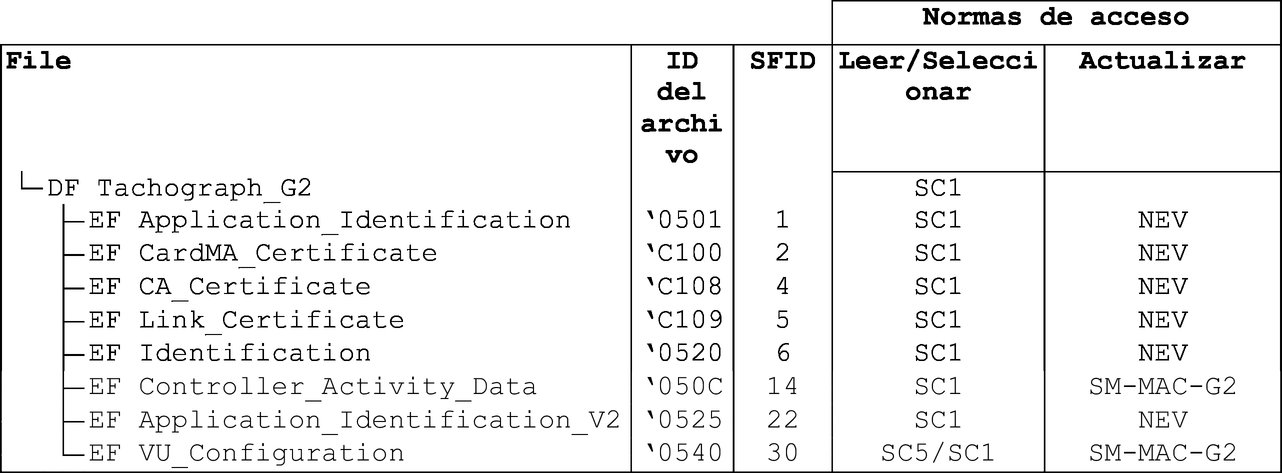
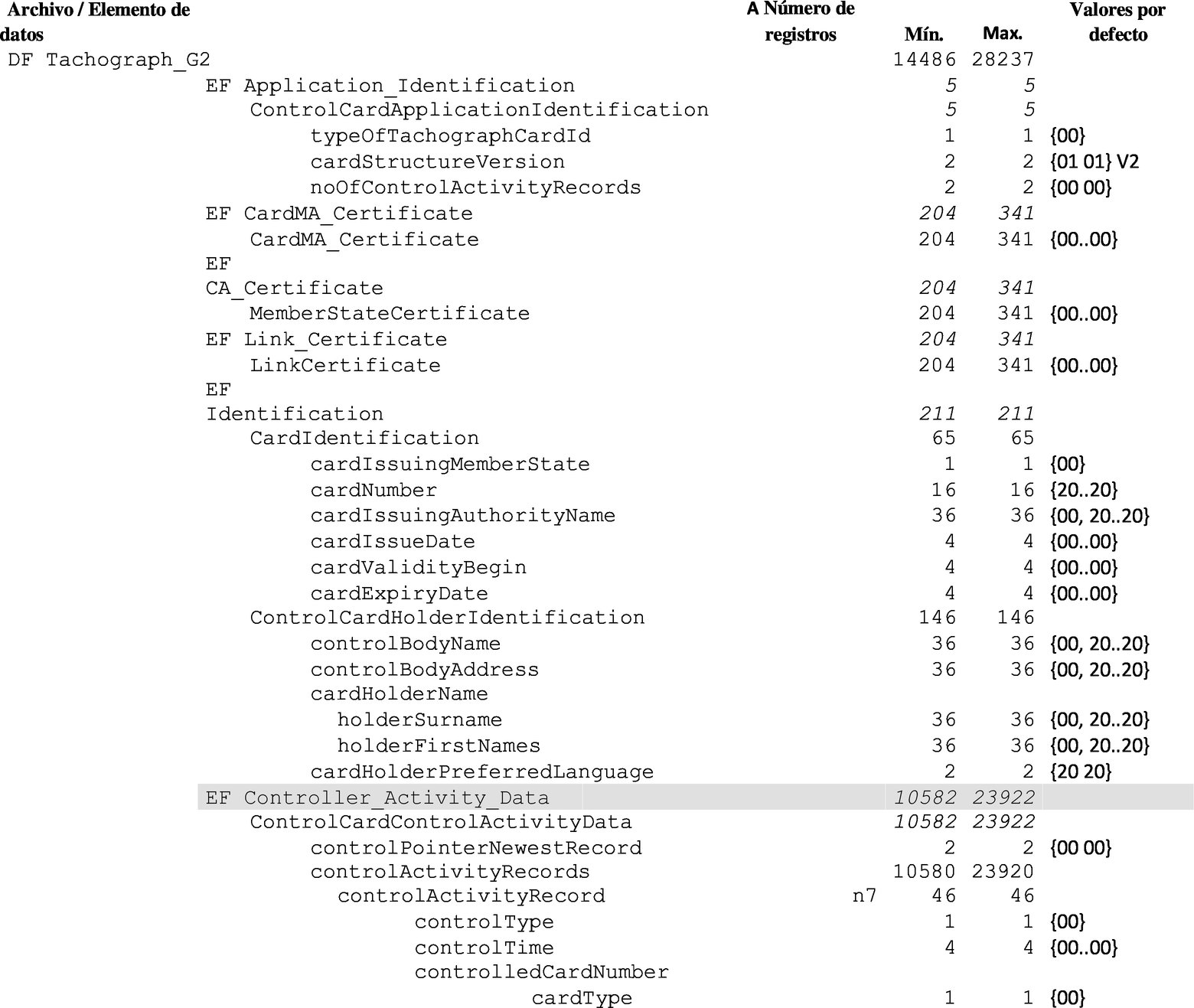
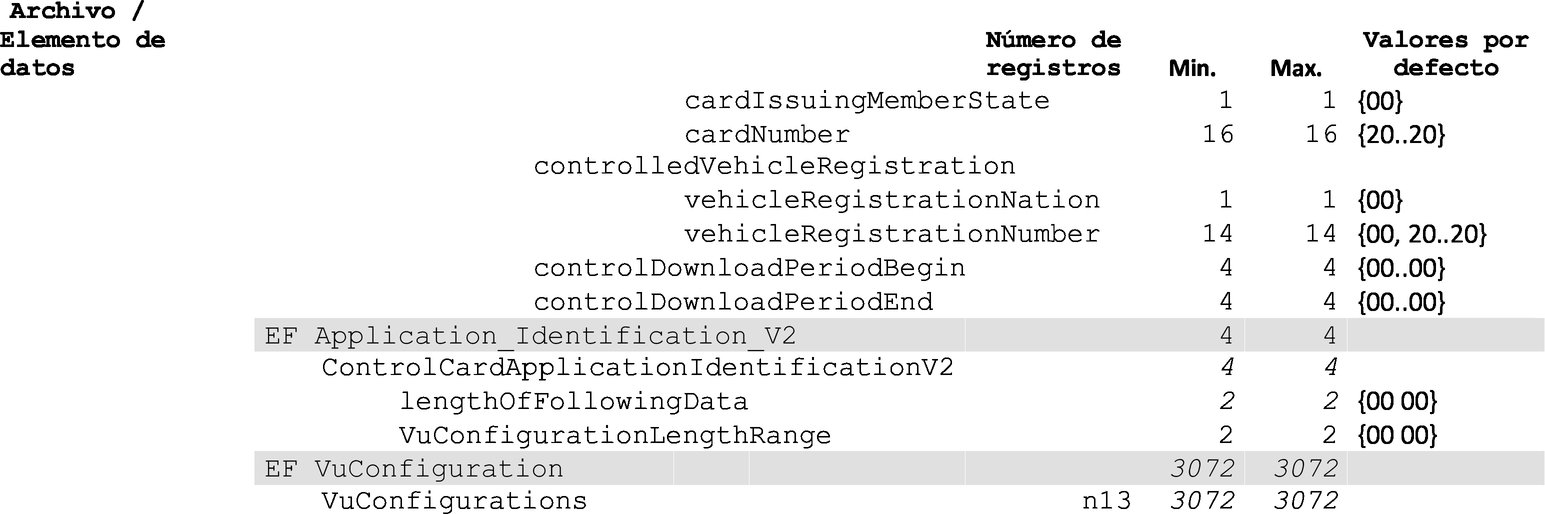
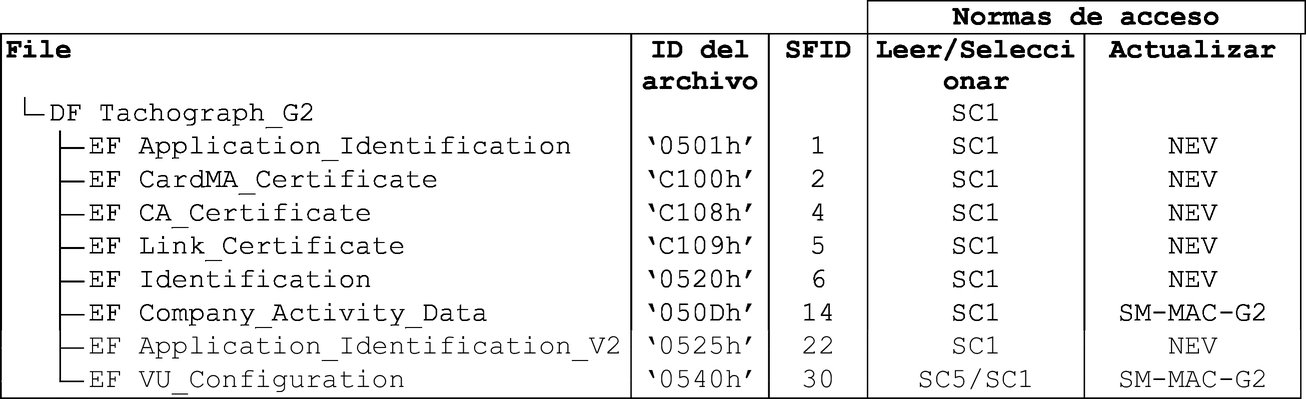
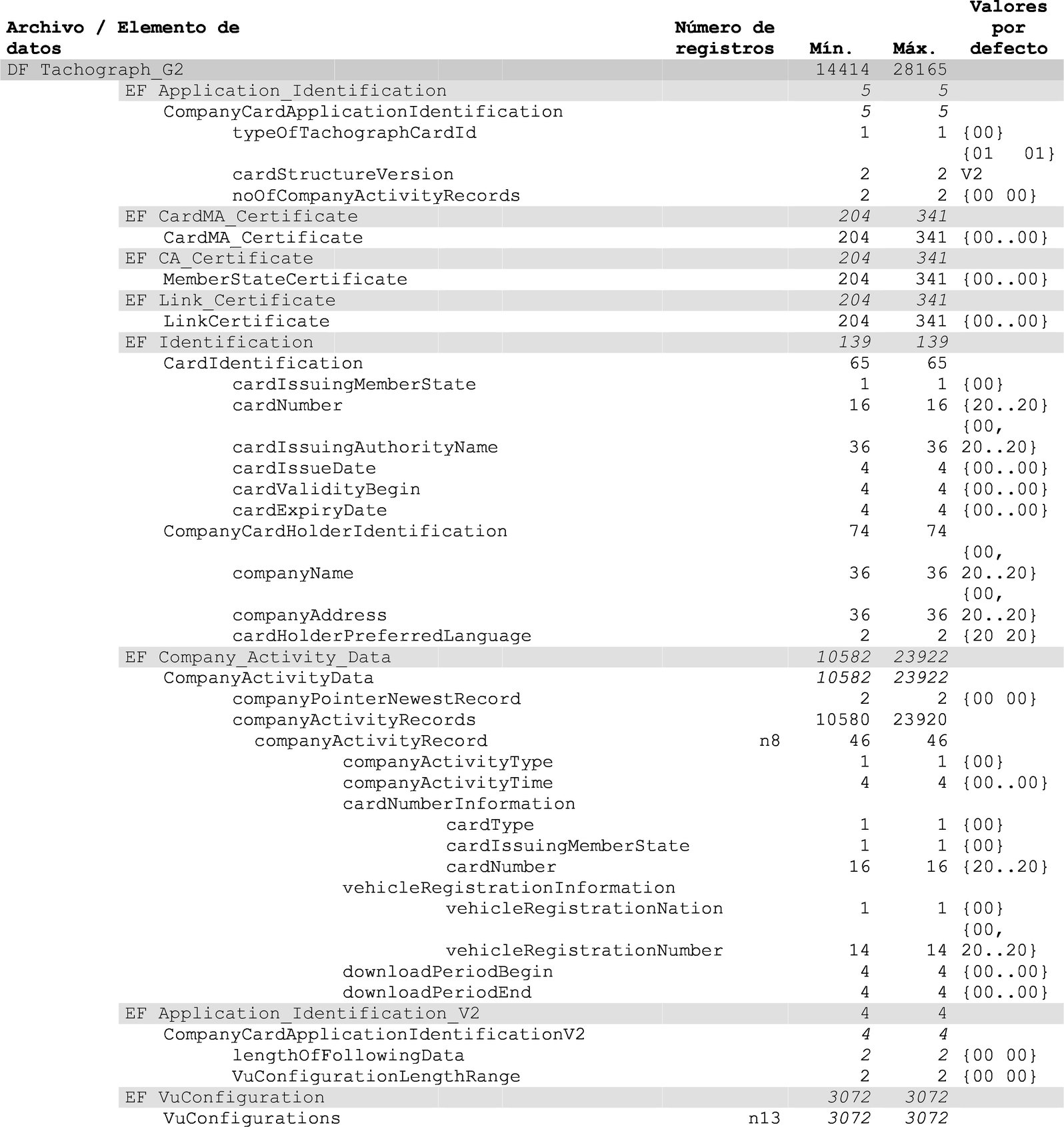
en el punto GNS_21, la tabla 1 se sustituye por la siguiente:
«
Tabla 1
Estructura de los archivos
|
|
|
Condiciones de acceso
|
|
Archivo
|
Identificador del archivo
|
Lectura
|
Actualización
|
Cifrado
|
|
MF
|
3F00
|
|
|
|
|
EF.ICC
|
0002
|
ALW
|
NEV
(por parte de la VU)
|
N.o
|
|
DF GNSS Facility
|
0501
|
ALW
|
NEV
|
N.o
|
|
EF EGF_MACertificate
|
C100
|
ALW
|
NEV
|
N.o
|
|
EF CA_Certificate
|
C108
|
ALW
|
NEV
|
N.o
|
|
EF Link_Certificate
|
C109
|
ALW
|
NEV
|
N.o
|
|
EF EGF
|
2F2F
|
SM-MAC
|
NEV
(por parte de la VU)
|
N.o
|
|
EF VU
|
2F30
|
SM-MAC
|
SM-MAC
|
N.o
|
|
Archivo / Elemento de datos
|
N.o de registro
|
Tamaño (bytes)
|
Valores por defecto
|
|
|
|
Mín.
|
Máx.
|
|
|
MF
|
|
552
|
1031
|
|
|
EF.ICC
|
|
|
|
|
|
sensorGNSSSerialNumber
|
|
8
|
8
|
|
|
|
|
|
|
|
|
DF GNSS Facility
|
|
612
|
1 023
|
|
|
EF EGF_MACertificate
|
|
204
|
341
|
|
|
EGFCertificate
|
|
204
|
341
|
{00..00}
|
|
EF CA_Certificate
|
|
204
|
341
|
|
|
MemberStateCertificate
|
|
204
|
341
|
{00..00}
|
|
EF Link_Certificate
|
|
204
|
341
|
|
|
LinkCertificate
|
|
204
|
341
|
{00..00}
|
|
|
|
|
|
|
|
EF EGF
|
|
|
|
|
|
Secuencia RMC NMEA
|
'01'
|
85
|
85
|
|
|
Primera secuencia GSA NMEA
|
'02'
|
85
|
85
|
|
|
Segunda secuencia GSA NMEA
|
'03'
|
85
|
85
|
|
|
Tercera secuencia GSA NMEA
|
'04'
|
85
|
85
|
|
|
Cuarta secuencia GSA NMEA
|
'05'
|
85
|
85
|
|
|
Quinta secuencia GSA NMEA
|
'06'
|
85
|
85
|
|
|
Número de serie ampliado del dispositivo GNSS externo definido en el apéndice 1 como SensorGNSSSerialNumber.
|
'07'
|
8
|
8
|
|
|
Identificador del sistema operativo del transceptor seguro GNSS definido en el apéndice 1 como SensorOSIdentifier.
|
'08'
|
2
|
2
|
|
|
Número de homologación del dispositivo GNSS externo definido en el apéndice 1 como SensorExternalGNSSApprovalNumber.
|
'09'
|
16
|
16
|
|
|
Identificador del componente de seguridad del dispositivo GNSS externo definido en el apéndice 1 como SensorExternalGNSSSCIdentifier.
|
'10'
|
8
|
8
|
|
|
Secuencia AMC
|
'11'
|
85
|
85
|
|
|
Primera secuencia ASA
|
'12'
|
85
|
85
|
|
|
Segunda secuencia ASA
|
'13'
|
85
|
85
|
|
|
Tercera secuencia ASA
|
'14'
|
85
|
85
|
|
|
Cuarta secuencia ASA
|
'15'
|
85
|
85
|
|
|
Quinta secuencia ASA
|
'16'
|
85
|
85
|
|
|
RFU: reservado para futuros usos.
|
De '17' a 'FD'
|
|
|
|
|
EF VU
|
|
|
|
|
|
VuRtcTime (véase el apéndice 1)
|
'01'
|
4
|
4
|
{00..00}
|
|
VuGnssMaximalTimeDifference (véase el apéndice 1)
|
'02'
|
2
|
2
|
{00..00}
|
»;
|
|
|
iii)
|
el punto 4.2.2 se modifica como sigue:
|
1)
|
en el punto GNS_22, el párrafo primero se sustituye por el texto siguiente:
|
«GNS_22
|
La transferencia segura de los datos de posición GNSS, la hora del RTC de la VU y la diferencia horaria máxima entre la hora verdadera y la hora del RTC de la VU se permitirá únicamente en las siguientes condiciones:»;
|
|
|
2)
|
el punto GNS_23 se sustituye por el texto siguiente:
|
«GNS_23
|
Cada T segundos, siendo T un valor igual o inferior a 20, a menos que se estén realizando el acoplamiento, la autenticación mutua o el acuerdo de las claves de sesión, la VU solicita al dispositivo GNSS externo información de posición mediante el siguiente proceso:
|
1.
|
La VU solicita al dispositivo GNSS externo datos de posición y datos sobre la dilución de precisión (de las secuencias GSA y ASA). El transceptor seguro de la VU utilizará los comandos SELECT (seleccionar) y READ RECORD(S) (leer registros) de la ISO/IEC 7816-4:2013 en el modo de solo autenticación de mensajería segura según se describe en el punto 11.5 del apéndice 11, con el identificador de archivo “2F2F” y el número de registro igual a “01” para la secuencia RMC NMEA, “02”, “03”, “04”, “05”, “06” para la secuencia GSA NMEA, “11” para la secuencia AMC, y “12”, “13”, “14”, “15”, “16” para la secuencia ASA.
|
|
2.
|
Los últimos datos de posición recibidos se almacenan en el EF con el identificador “2F2F”, y los registros descritos en la tabla 1 en el transceptor seguro GNSS, puesto que el transceptor seguro GNSS recibe del receptor GNSS datos NMEA con una frecuencia de al menos 1 Hz a través de la interfaz de datos GNSS.
|
|
3.
|
El transceptor seguro GNSS envía la respuesta al transceptor seguro de la VU utilizando un mensaje de respuesta APDU en el modo de solo autenticación de mensajería segura, según se describe en el punto 11.5 del apéndice 11.
|
|
4.
|
El transceptor seguro de la VU comprueba la autenticidad y la integridad de la respuesta recibida. En caso de que el resultado sea positivo, se transfieren los datos de posición al procesador de la VU a través de la interfaz de datos GNSS.
|
|
5.
|
El procesador de la VU comprueba los datos recibidos extrayendo la información (por ejemplo, latitud, longitud u hora) de la secuencia RMC NMEA. La secuencia RMC NMEA incluye la información si la posición no autenticada es válida. Si la posición no autenticada es válida, el procesador de la VU también extrae los valores de HDOP de las secuencias GSA NMEA y calcula el valor mínimo con los sistemas de satélite disponibles (es decir, cuando se dispone de una posición definida).
|
|
6.
|
El procesador de la VU extrae asimismo la información (por ejemplo, latitud, longitud u hora) de la secuencia AMC. La secuencia AMC incluye la información si la posición autenticada no es válida o la señal GNSS ha sufrido un ataque. Si la posición es válida, el procesador de la VU también extrae los valores de HDOP de las secuencias ASA y calcula el valor mínimo con los sistemas de satélite disponibles (es decir, cuando se dispone de una posición definida).
|
|
|
GNS_23a
|
La VU escribirá también la hora de su RTC y la diferencia horaria máxima entre la hora verdadera y la hora de su RTC según sea necesario, utilizando los comandos SELECT (seleccionar) y WRITE RECORD(S) (escribir registros) de la ISO/IEC 7816-4:2013 en el modo de solo autenticación de mensajería segura según se describe en el punto 11.5 del apéndice 11, con el identificador de archivo “2F30” y el número de registro igual a “01” para VuRtcTime y “02” para MaximalTimeDifference.»;
|
|
|
|
iv)
|
el punto 4.2.3 se modifica como sigue:
|
1)
|
en el punto GNS_26, los guiones cuarto y quinto se sustituyen por el texto siguiente:
|
«-
|
Si no se localiza el registro, el transceptor seguro GNSS contesta con el estado “6A83”.
|
|
-
|
Si el dispositivo GNSS externo detecta manipulación, contestará con el estado “6690”».;
|
|
|
2)
|
se suprime el punto GNS_27;
|
|
|
v)
|
se insertan los puntos 4.2.4 y 4.2.5 siguientes:
|
«4.2.4
|
Estructura del comando WriteRecord
En este punto se detalla la estructura del comando Write Record (escribir registro). Se incluye la mensajería segura (modo de solo autenticación) descrita en el apéndice 11, “Mecanismos de seguridad comunes”.
|
GNS_26a
|
El comando admitirá el modo de solo autenticación de mensajería segura, véase el apéndice 11.
|
|
GNS_26b
|
Mensaje de comando
|
Byte
|
Longitud
|
Valor
|
Descripción
|
|
CLA
|
1
|
“0Ch”
|
Se pide mensajería segura
|
|
INS
|
1
|
“D2h”
|
Escribir registro
|
|
P1
|
1
|
“XXh”
|
Número de registro (“00” se refiere al registro actual)
|
|
P2
|
1
|
“04h”
|
Escribir el registro con el número de registro indicado en P1
|
|
Datos
|
X
|
“XXh”
|
Datos
|
|
|
GNS_26c
|
El registro con referencia P1 se convierte en el registro actual.
|
Byte
|
Longitud
|
Valor
|
Descripción
|
|
SW
|
2
|
“XXXXh”
|
Palabras de estado (SW1, SW2)
|
|
—
|
Si el comando se ejecuta correctamente, el transceptor seguro GNSS contesta con el estado “9000”.
|
|
—
|
Si el archivo actual no está destinado al registro, el transceptor seguro GNSS contesta con el estado “6981”.
|
|
—
|
Si se utiliza el comando con P1 = “00” pero no se dispone de EF, el transceptor seguro GNSS contesta con el estado “6986” (comando no permitido).
|
|
—
|
Si no se localiza el registro, el transceptor seguro GNSS contesta con el estado “6A83”.
|
|
—
|
Si el dispositivo GNSS externo detecta manipulación, contestará con el estado “6690”.
|
|
|
|
4.2.5
|
Otros comandos
|
GNS_27
|
El transceptor seguro GNSS admitirá los siguientes comandos de tacógrafo de segunda generación especificados en el apéndice 2:
|
Comando
|
Referencia
|
|
Select (seleccionar)
|
Apéndice 2, punto 3.5.1
|
|
Read Binary (leer archivo binario)
|
Apéndice 2, punto 3.5.2
|
|
Get Challenge (obtener interrogación)
|
Apéndice 2, punto 3.5.4
|
|
PSO: Verify Certificate (verificar certificado)
|
Apéndice 2, punto 3.5.7
|
|
External Authenticate (autenticación externa)
|
Apéndice 2, punto 3.5.9
|
|
General Authenticate (autenticación general)
|
Apéndice 2, punto 3.5.10
|
|
MSE:SET
|
Apéndice 2, punto 3.5.11
|
|
|
»;
|
|
vi)
|
en el punto 4.4.1, el punto GNS_28 se sustituye por el texto siguiente:
|
«GNS_28
|
En la VU se registrará un incidente de error de comunicación con el dispositivo GNSS externo, según se define en el requisito 82 del anexo I C y el apéndice 1 (EventFaultType). En este contexto, se activa un error de comunicación cuando el transceptor seguro de la VU no recibe ningún mensaje de respuesta tras un mensaje de petición enviado según se describe en el punto 4.2.»;
|
|
|
vii)
|
en el punto 4.4.2, el punto GNS_29 se sustituye por el texto siguiente:
|
«GNS_29
|
Si se ha manipulado el dispositivo GNSS externo, el transceptor seguro GNSS garantizará la indisponibilidad del material criptográfico. Tal y como se describe en GNS_25 y en GNS_26, la VU detectará la manipulación si la respuesta tiene el estado “6690”. La VU generará y registrará entonces un incidente de intento de violación de la seguridad, según se define en el requisito 85 del anexo I C y el apéndice 1 (EventFaultType correspondiente a detección de manipulación del GNSS). Alternativamente, el dispositivo GNSS externo podrá responder a las peticiones de la VU sin mensajería segura y con el estado “6A88”.»;
|
|
|
viii)
|
en el punto 4.4.3, el punto GNS_30 se sustituye por el texto siguiente:
|
«GNS_30
|
Si el transceptor seguro GNSS no recibe datos del receptor GNSS, generará un mensaje de respuesta al comando READ RECORD (leer registro) con el número de registro igual a “01” y con un campo de datos de 12 bytes, todos ellos fijados en 0xFF. Una vez recibido este mensaje de respuesta con este valor del campo de datos, la VU generará y registrará un incidente de ausencia de información sobre la posición procedente del receptor GNSS, según se define en el requisito 81 del anexo I C y el apéndice 1 (EventFaultType).»;
|
|
|
ix)
|
el punto 4.4.4 se modifica como sigue:
|
1)
|
el punto GNS_31 se sustituye por el texto siguiente:
|
«GNS_31
|
Si la VU detecta que el certificado EGF empleado para las autenticaciones mutuas ya no es válido, generará y registrará un incidente de intento de violación de la seguridad, según se define en el requisito 85 del anexo I C y el apéndice 1 (EventFaultType correspondiente a certificado del dispositivo GNSS externo expirado). La VU seguirá utilizando los datos GNSS de posición recibidos.»;
|
|
|
2)
|
el encabezamiento del gráfico 4 se sustituye por el texto siguiente:
«Gráfico 6
Esquema del dispositivo GNSS externo»;
|
|
|
|
f)
|
el punto 5 se modifica como sigue:
|
i)
|
en el punto 5.1, el punto GNS_32 se sustituye por el texto siguiente:
|
«GNS_32
|
Para transmitir la posición, la DOP y los datos de los satélites, el receptor GNSS actuará como emisor y transmitirá secuencias NMEA o similares a NMEA al procesador de la VU, que actuará como receptor con una frecuencia de 1/10 Hz o superior para el conjunto predefinido de secuencias, que deberá incluir al menos las secuencias RMC, GSA, AMC y ASA. Alternativamente, el procesador de la VU y el receptor GNSS interno podrán utilizar otros formatos de datos para intercambiar los datos contenidos en las secuencias NMEA o similares a NMEA especificadas en GNS_4, GNS_4a y GNS_5.»;
|
|
|
ii)
|
el punto 5.2 se sustituye por el texto siguiente:
|
«5.2.
|
Transferencia de información del receptor GNSS a la VU
|
GNS_34
|
El procesador de la VU comprueba los datos recibidos extrayendo la información (por ejemplo, latitud, longitud u hora) de la secuencia RMC NMEA y la secuencia AMC.
|
|
GNS_35
|
La secuencia RMC NMEA incluye la información si la posición no autenticada es válida. Si la posición no autenticada no es válida, los datos de posición no están disponibles ni pueden emplearse para registrar la posición del vehículo. Si la posición no autenticada es válida, el procesador de la VU extrae también los valores de HDOP de la GSA NMEA.
|
|
GNS_36
|
El procesador de la VU extrae asimismo la información (por ejemplo, latitud, longitud u hora) de la secuencia AMC. La secuencia AMC incluye la información si la posición no autenticada es válida conforme a GNS_4a. Si la posición no autenticada es válida, el procesador de la VU extrae también los valores de HDOP de las secuencias ASA.
|
|
|
5.3.
|
Transferencia de información de la VU al receptor GNSS
|
GNS_37
|
El procesador de la VU proporciona al receptor GNSS la hora del RTC de la VU y la diferencia máxima entre la hora verdadera y la hora del RTC de la VU, conforme a GNS_3f y GNS_3g.
|
|
|
5.4.
|
Gestión de errores
|
5.4.1
|
Ausencia de información sobre la posición procedente del receptor GNSS
|
GNS_38
|
La VU generará y registrará un incidente de ausencia de información sobre la posición procedente del receptor GNSS, según se define en el requisito 81 del anexo I C y el apéndice 1 (EventFaultType).»;
|
|
|
|
|
|
g)
|
los puntos 6 y 7 se sustituyen por los siguientes:
|
«6.
|
PROCESAMIENTO Y REGISTRO DE LOS DATOS DE POSICIÓN POR LA VU
Este punto es aplicable tanto a la configuración de tacógrafo inteligente con dispositivo GNSS externo como sin él.
|
GNS_39
|
Los datos de posición se almacenarán en la VU junto con un indicador que señale si la posición ha sido autenticada. Cuando haya que registrar los datos de posición en la VU, se aplicarán las siguientes reglas:
|
a)
|
Si tanto la posición autenticada como la estándar son válidas y coherentes, se registrarán en la VU la posición estándar y su exactitud, y el indicador se ajustará en “autenticada”.
|
|
b)
|
Si la posición autenticada y la posición estándar son válidas, pero no coherentes, la VU almacenará la posición autenticada y su exactitud, y el indicador se ajustará en “autenticada”.
|
|
c)
|
Si la posición autenticada es válida y la posición estándar no lo es, la VU registrará la posición autenticada y su exactitud, y el indicador se ajustará en “autenticada”.
|
|
d)
|
Si la posición estándar es válida y la posición autenticada no lo es, la VU registrará la posición estándar y su exactitud, y el indicador se ajustará en “no autenticada”.
|
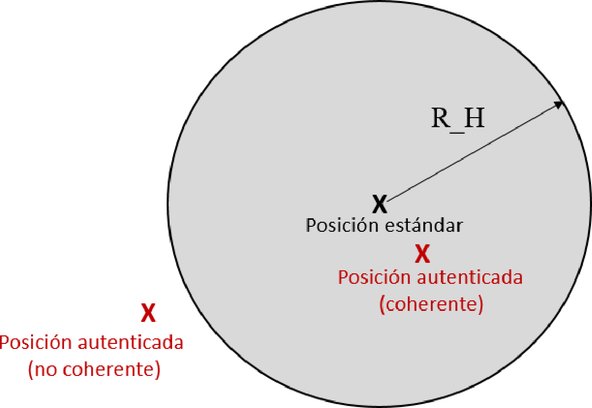
Se considera que la posición autenticada y la posición estándar son coherentes, como se muestra en el gráfico 7, cuando la posición autenticada horizontal puede encontrarse en un círculo cuyo centro es la posición estándar horizontal y cuyo radio resulta de redondear al entero superior más próximo el valor R_H calculado con la siguiente fórmula:
|
R_H = 1,74 • σUERE • HDOP
|
donde:
|
—
|
coherencia entre las posiciones estándar y autenticada. - R_H es el radio relativo de un círculo en torno a la posición horizontal estimada, en metros. Es un indicador que se utiliza para comprobar la
|
|
—
|
en cuestión, incluidos los entornos urbanos. Se utilizará un valor constante de σUERE es la desviación estándar del error equivalente en distancia al usuario (UERE, user equivalent range error), que modeliza todos los errores de medición de la aplicación σUERE = 10 metros.
|
|
—
|
HDOP es la dilución de precisión horizontal calculada por el receptor GNSS.
|
|
—
|
σUERE . HDOP es la estimación de la raíz del error cuadrático medio en la horizontal.
|
|
|
GNS_40
|
Cuando el valor del estado en una secuencia AMC recibida sea “J”, “O” o “F” conforme al requisito GNS_4a, la VU generará y registrará un incidente de anomalía del GNSS, según se define en el requisito 88 bis del anexo I C y el apéndice 1 (EventFaultType). La unidad instalada en el vehículo podrá efectuar comprobaciones adicionales antes de almacenar un incidente de anomalía del GNSS tras recibir un estado “J” u “O”.
|
|
|
7.
|
CONFLICTO TEMPORAL DEL GNSS
|
GNS_41
|
Si la VU detecta una discrepancia entre la hora de su función de medición de la hora y la hora procedente de las señales GNSS, generará y registrará un incidente de conflicto temporal, según se define en el requisito 86 del anexo I C y el apéndice 1 (EventFaultType).»;
|
|
|
|
h)
|
se añade el punto 8 siguiente:
|
«8.
|
CONFLICTO DE MOVIMIENTO DEL VEHÍCULO
|
GNS_42
|
La VU activará y registrará un incidente de conflicto de movimiento del vehículo conforme al requisito 84 del anexo I C si la información de movimiento calculada a partir del sensor de movimiento no coincide con la información de movimiento calculada a partir del receptor GNSS interno, el dispositivo GNSS externo u otra fuente independiente de información de movimiento conforme al requisito 26 del anexo I C.
El incidente de conflicto de movimiento del vehículo se activará cuando se dé una de las siguientes condiciones de activación:
|
|
Condición de activación 1:
Se utilizará la media recortada de las diferencias de velocidad entre estas fuentes cuando esté disponible la información de posición procedente del receptor GNSS y cuando el encendido del vehículo esté activado, como se especifica a continuación:
|
—
|
cada diez segundos como máximo, se calculará el valor absoluto de la diferencia entre la velocidad del vehículo estimada a partir del GNSS y la estimada a partir del sensor de movimiento;
|
|
—
|
para calcular la media recortada se utilizarán todos los valores computados en un intervalo de tiempo que incluya los últimos cinco minutos de movimiento del vehículo;
|
|
—
|
la media recortada se computará como el promedio del 80 % de los valores restantes, después de haberse eliminado los más elevados en valores absolutos.
|
El incidente de conflicto de movimiento del vehículo se activará si la media recortada es superior a 10 km/hora durante cinco minutos seguidos en los que el vehículo esté en movimiento. (Nota: (con el empleo de la media recortada de los últimos cinco minutos se pretende mitigar el riesgo de obtener mediciones discrepantes y valores transitorios).
Para computar la media recortada, se considerará que el vehículo está en movimiento si por lo menos uno de los valores de su velocidad estimado a partir del sensor de movimiento o del receptor GNSS no es igual a cero.
|
|
|
Condición de activación 2:
El incidente de conflicto de movimiento del vehículo también se activará si se da la siguiente condición:
DistanciaGnss>[DiferenciaCuentakilómetros×FactorToleranciaCuentakilómetros+Mínimo(LímiteSuperiorDistanciaDeslizamiento;(DiferenciaCuentakilómetros×FactorDeslizamiento))+ToleranciaGnss+DistanciaTransbordadorTren]
donde:
|
—
|
DistanciaGnss es la distancia entre la posición actual del vehículo y la anterior, obtenidas ambas a partir de mensajes de posición autenticados válidos, sin considerar la altura,
|
|
—
|
DiferenciaCuentakilómetros es la diferencia entre el valor actual del cuentakilómetros y el valor del cuentakilómetros correspondiente al mensaje de posición autenticado válido anterior,
|
|
—
|
FactorToleranciaCuentakilómetros es igual a 1,1 (factor de tolerancia del caso más desfavorable para todas las tolerancias de medición del cuentakilómetros del vehículo),
|
|
—
|
ToleranciaGnss es igual a 1 km (caso más desfavorable de la tolerancia del GNSS),
|
|
—
|
Mínimo (LímiteSuperiorDistanciaDeslizamiento;(DiferenciaCuentakilómetros * FactorDeslizamiento)) es el valor mínimo entre:
|
—
|
LímiteSuperiorDistanciaDeslizamiento, que es igual a 10 km (límite superior de la distancia de deslizamiento causada por los efectos de deslizamiento durante el frenado),
|
|
—
|
y DiferenciaCuentakilómetros * FactorDeslizamiento, donde FactorDeslizamiento es igual a 0,2 (influencia máxima de los efectos de deslizamiento durante el frenado),
|
|
|
—
|
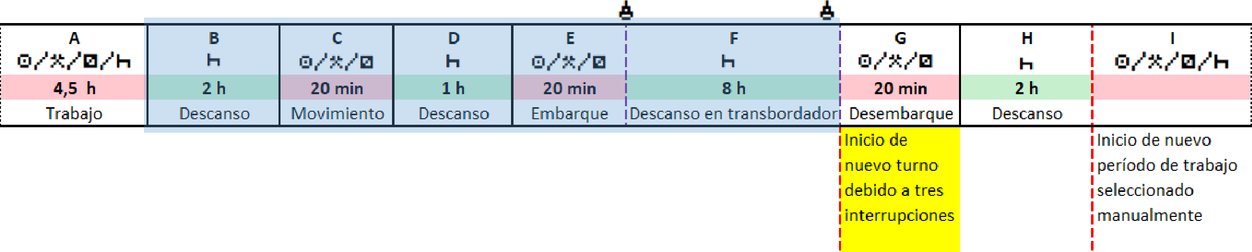
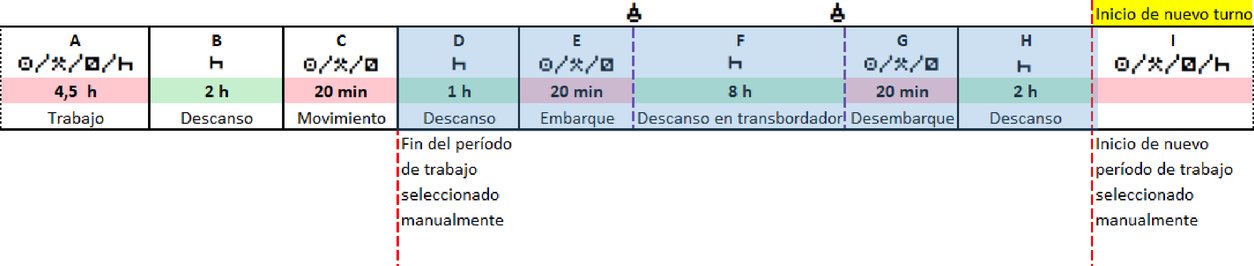
DistanciaTransbordadorTren se computa como: DistanciaTransbordadorTren =200 km/h * tTransbordadorTren, donde tTransbordadorTren es la suma de la duración en horas de los trayectos transbordador/tren en el intervalo de tiempo considerado. La duración de los trayectos transbordador/tren se define como la diferencia horaria entre su indicador de final y su indicador de comienzo.
|
Las verificaciones señaladas se realizarán cada quince minutos si están disponibles los datos de posición necesarios y, si no, tan pronto como estos estén disponibles.
Con respecto a esta condición de activación:
|
—
|
la fecha y la hora de comienzo del incidente serán las mismas que aquellas en las que se recibió el mensaje de posición anterior,
|
|
—
|
la fecha y la hora de final del incidente serán las mismas que aquellas en las que la condición comprobada vuelve a ser falsa.
|
|
|
|
Condición de activación 3:
La unidad instalada en el vehículo descubre una discrepancia consistente en que el sensor de movimiento no detecta movimiento alguno y la fuente independiente de información de movimiento detecta movimiento durante un período determinado. El fabricante de la unidad instalada en el vehículo determinará las condiciones para registrar una discrepancia y el período de detección de esta, si bien la discrepancia deberá detectarse en no más de tres horas.»;
|
|
|
|
|


















































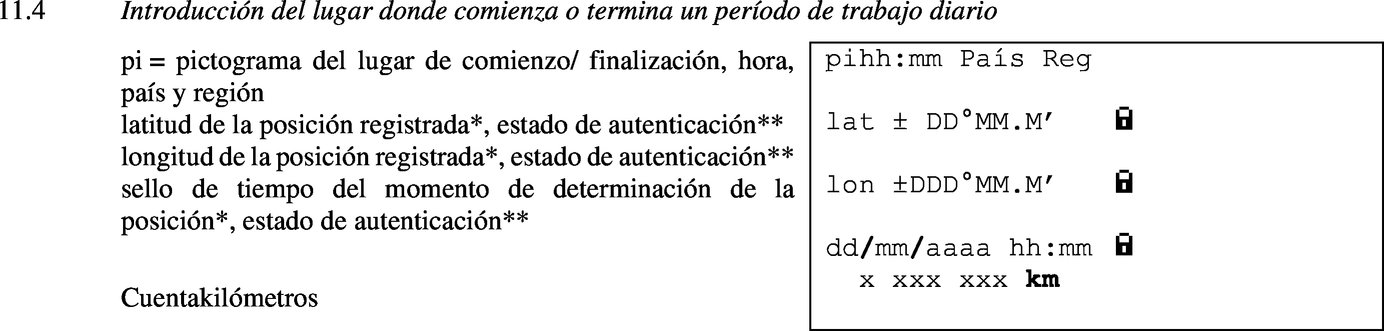
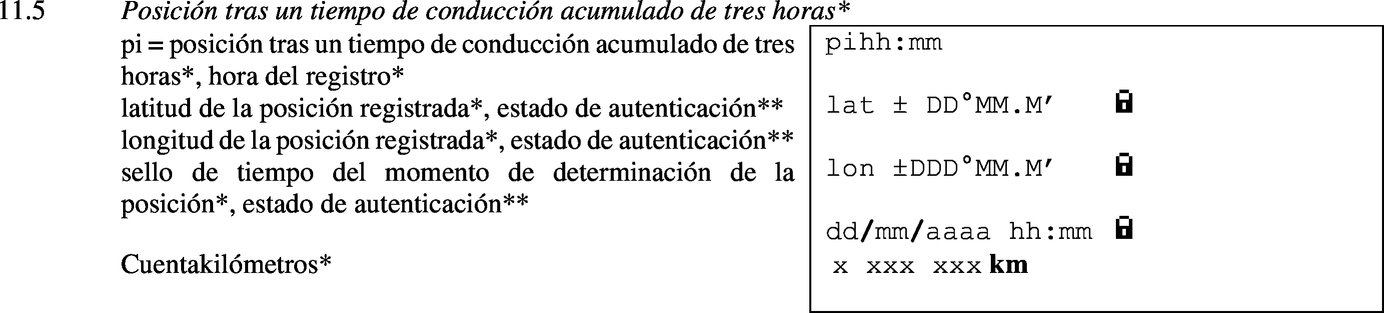
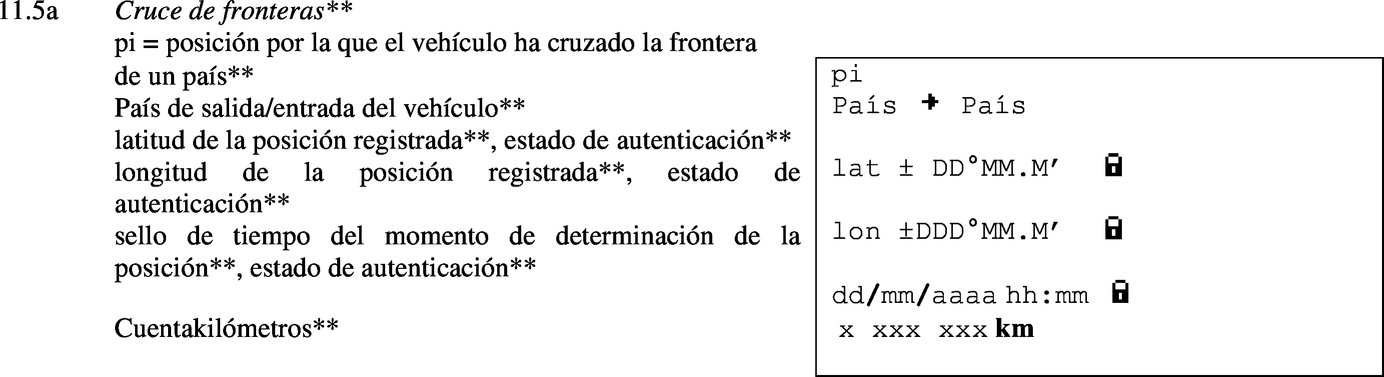
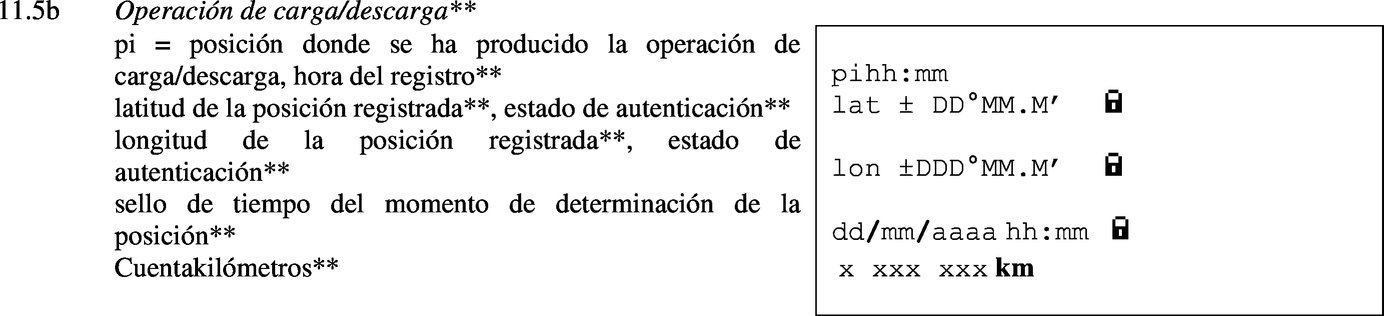
 indica que esta posición se ha calculado a partir de mensajes de navegación autenticados,
indica que esta posición se ha calculado a partir de mensajes de navegación autenticados,








 »;
»; »;
»; »;
»; »;
»; »;
»; »;
»;