Agencia Estatal Boletín Oficial del Estado






LA COMISIÓN EUROPEA,
Visto el Tratado de Funcionamiento de la Unión Europea,
Visto el Reglamento (CE) n. 595/2009 del Parlamento Europeo y del Consejo, de 18 de junio de 2009, relativo a la homologación de los vehículos de motor y los motores en lo concerniente a las emisiones de vehículos pesados (Euro VI) y al acceso a la información sobre reparación y mantenimiento del vehículo (1), y en particular su artículo 4, apartado 3, y su artículo 5, apartado 4, letra e),
Considerando lo siguiente:
|
(1) |
El Reglamento (UE) 2017/2400 de la Comisión (2) introduce un método común para comparar objetivamente el rendimiento de los vehículos pesados introducidos en el mercado de la Unión con respecto a sus emisiones de CO2 y a su consumo de combustible. Establece disposiciones para la certificación de los componentes que repercuten en las emisiones de CO2 y en el consumo de combustible de los vehículos pesados, introduce una herramienta de simulación para la determinación y la declaración de las emisiones de CO2 y el consumo de combustible de dichos vehículos y establece, entre otras cosas, requisitos para que las autoridades de los Estados miembros y los fabricantes verifiquen la conformidad de la certificación de los componentes y la utilización conforme de la herramienta de simulación. |
|
(2) |
El Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo (3) ha trasladado las normas relativas al acceso a la información sobre el diagnóstico a bordo y a la información sobre la reparación y el mantenimiento de los vehículos del Reglamento (CE) n.o 595/2009. Con el fin de adaptar la redacción del Reglamento (UE) 2017/2400 a la redacción modificada del Reglamento (CE) n.o 595/2009, deben suprimirse del Reglamento (UE) 2017/2400 las referencias a la información sobre el diagnóstico a bordo y a la información sobre la reparación y el mantenimiento de los vehículos. |
|
(3) |
El Reglamento (UE) 2017/2400 determina las emisiones de CO2 y el consumo de combustible de los camiones pesados. Sin embargo, para ofrecer una mejor visión de las emisiones de CO2, estas se deben calcular en más vehículos. Por consiguiente, es necesario determinar las emisiones de CO2 y el consumo de combustible de otros vehículos pesados, a saber, los camiones medios y los autobuses pesados. |
|
(4) |
Para abarcar adecuadamente las tecnologías futuras, es necesario especificar requisitos adicionales para las nuevas tecnologías, como los vehículos híbridos y los vehículos eléctricos puros, los vehículos de combustible dual, la recuperación del calor residual y los sistemas avanzados de asistencia al conductor. |
|
(5) |
Es conveniente que el procedimiento de ensayo de verificación en carretera se aplique a los camiones medios y a las nuevas tecnologías, dado que dicho procedimiento ha demostrado ser una herramienta importante para la verificación de los cálculos de las emisiones de CO2 y del consumo de combustible. Sin embargo, en este momento no es posible ampliar a los autobuses pesados el procedimiento de ensayo de verificación en carretera debido a las complejidades del sistema multifásico de producción y homologación que se aplica a estos vehículos. |
|
(6) |
Algunas definiciones y requisitos del Reglamento (UE) 2017/2400 requieren aclaraciones y correcciones adicionales, incluida una mayor adaptación a las normas de comportamiento en materia de emisiones de CO2 para vehículos pesados nuevos establecidas en el Reglamento (UE) 2019/1242 del Parlamento Europeo y del Consejo (4). |
|
(7) |
A fin de permitir que los Estados miembros, las autoridades nacionales y los agentes económicos dispongan de tiempo suficiente para prepararse para la aplicación de las normas introducidas por el presente Reglamento, la fecha de aplicación de este debe aplazarse. |
|
(8) |
Dado que algunos fabricantes pueden preferir cumplir los requisitos establecidos en el presente Reglamento antes de su fecha de aplicación, deben tener la posibilidad de obtener una licencia para utilizar la herramienta de simulación y recibir una certificación de los componentes de conformidad con las normas introducidas por el presente Reglamento antes de su fecha de aplicación. |
|
(9) |
Para determinados grupos de vehículos y determinadas tecnologías, la herramienta de simulación necesaria para la obligación de determinar y declarar las emisiones de CO2 y el consumo de combustible de los vehículos nuevos solo estará disponible después de la fecha general de aplicación del presente Reglamento. En estos casos, los requisitos solo pueden exigirse a partir del momento en que la herramienta de simulación esté disponible. Esta es la razón por la que algunas disposiciones del presente Reglamento solo se aplicarán a partir de una fecha posterior. |
|
(10) |
Las medidas previstas en el presente Reglamento se ajustan al dictamen del Comité Técnico sobre Vehículos de Motor. |
HA ADOPTADO EL PRESENTE REGLAMENTO:
El Reglamento (UE) 2017/2400 se modifica como sigue:
|
1) |
los artículos 1 y 2 se sustituyen por el texto siguiente: «Artículo 1 Objeto El presente Reglamento complementa el marco jurídico para la homologación de tipo de los vehículos de motor y de los motores con respecto a las emisiones establecido por el Reglamento (UE) n.o 582/2011, fijando las normas para la expedición de licencias que permitan utilizar una herramienta de simulación con vistas a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos nuevos que vayan a venderse, matricularse o ponerse en servicio en la Unión, así como para la utilización de dicha herramienta de simulación y la declaración de los valores de emisiones de CO2 y consumo de combustible así determinados. Artículo 2Ámbito de aplicación 1. Sin perjuicio de lo dispuesto en el artículo 4, párrafo segundo, el presente Reglamento será de aplicación a los camiones medios, los camiones pesados y los autobuses pesados. 2. En el caso de homologaciones de tipo multifásicas u homologaciones individuales de camiones medios y pesados, el presente Reglamento será de aplicación a los camiones básicos. En el caso de los autobuses pesados, el presente Reglamento será de aplicación a los vehículos primarios, a los vehículos provisionales y a los vehículos completos o completados. 3. El presente Reglamento no será de aplicación a los vehículos todoterreno, a los vehículos especiales ni a los vehículos especiales todoterreno, tal como se definen, respectivamente, en la parte A, puntos 2.1, 2.2 y 2.3, del anexo I del Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo (*1). (*1) Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo, de 30 de mayo de 2018, sobre la homologación y la vigilancia del mercado de los vehículos de motor y sus remolques y de los sistemas, los componentes y las unidades técnicas independientes destinados a dichos vehículos, por el que se modifican los Reglamentos (CE) n.o 715/2007 y (CE) n.o 595/2009 y por el que se deroga la Directiva 2007/46/CE (DO L 151 de 14.6.2018, p. 1).»;" |
|
2) |
el artículo 3 se modifica como sigue:
|
|
3) |
el artículo 4 se sustituye por el texto siguiente: «Artículo 4 Grupos de vehículos A los efectos del presente Reglamento, los vehículos de motor se clasificarán en grupos de vehículos conforme a los cuadros 1 a 6 del anexo I. Los artículos 5 a 23 no son de aplicación para los camiones pesados de los grupos de vehículos 6, 7, 8, 13, 14, 15, 17, 18 y 19 que figuran en el cuadro 1 del anexo I, ni a los camiones medios de los grupos de vehículos 51, 52, 55 y 56 que figuran en el cuadro 2 del anexo I, ni a los vehículos con eje motor delantero de los grupos de vehículos 11, 12 y 16 que figuran en el cuadro 1 del anexo I.»; |
|
4) |
en el artículo 5, apartado 3, la primera frase se sustituye por el texto siguiente: «La herramienta de simulación se utilizará para determinar las emisiones de CO2 y el consumo de combustible de los vehículos nuevos.»; |
|
5) |
en el artículo 5, el apartado 5 se sustituye por el texto siguiente: «5. La herramienta de hashing se utilizará para establecer una asociación inequívoca entre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas de un componente, una unidad técnica independiente o un sistema y su respectivo documento de certificación, así como una asociación inequívoca entre un vehículo y el archivo de registros del fabricante, el archivo de información del vehículo y el archivo de información del cliente según el anexo IV que le corresponden.»; |
|
6) |
en el capítulo 2, el título se sustituye por el texto siguiente: «LICENCIA PARA UTILIZAR LA HERRAMIENTA DE SIMULACIÓN A EFECTOS DE HOMOLOGACIÓN DE TIPO CON RESPECTO A LAS EMISIONES»; |
|
7) |
el artículo 6 se modifica como sigue:
|
|
8) |
en el artículo 7, el apartado 1 se sustituye por el texto siguiente: «1. La autoridad de homologación concederá la licencia si el fabricante de vehículos presenta una solicitud de acuerdo con el artículo 6 y demuestra que se cumplen los requisitos establecidos en el anexo II con respecto al caso de aplicación de que se trate.»; |
|
9) |
el artículo 8 se modifica como sigue:
|
|
10) |
el artículo 9 se modifica como sigue:
|
|
11) |
en el artículo 10, apartado 3, se añade el párrafo siguiente: «Cuando se produzca un mal funcionamiento de la herramienta de simulación en una fase de la cadena de fabricación de autobuses pesados previa a las fases de fabricación completas o completadas, la obligación, de conformidad con el artículo 9, apartado 1, de utilizar la herramienta de simulación en las fases de fabricación subsiguientes se pospondrá durante un máximo de catorce días civiles a partir de la fecha en que el fabricante de la fase anterior puso el archivo de información del vehículo a disposición del fabricante de la fase completa o completada.»; |
|
12) |
en el artículo 11, los apartados 1 y 2 se sustituyen por el texto siguiente: «1. El fabricante de vehículos deberá guardar durante un mínimo de veinte años tras la producción del vehículo el archivo de registros del fabricante, el archivo de información del vehículo y los certificados sobre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, los sistemas y las unidades técnicas independientes, y deberá ponerlos a disposición de la autoridad de homologación y de la Comisión, previa solicitud. 2. El fabricante de vehículos deberá proporcionar a las entidades autorizadas de los Estados miembros o a la Comisión, previa solicitud, en el plazo de quince días laborables, el archivo de registros del fabricante o el archivo de información del vehículo.»; |
|
13) |
el artículo 12 se modifica como sigue:
|
|
14) |
el artículo 13 se modifica como sigue:
|
|
15) |
el artículo 14 se modifica como sigue:
|
|
16) |
el artículo 15 se modifica como sigue:
|
|
17) |
el artículo 16 se modifica como sigue:
|
|
18) |
el artículo 17 se modifica como sigue:
|
|
19) |
en el artículo 18, apartado 1, el párrafo primero se modifica como sigue:
|
|
20) |
el artículo 20 se modifica como sigue:
|
|
21) |
el artículo 21 se modifica como sigue:
|
|
22) |
el artículo 22 se modifica como sigue:
|
|
23) |
el artículo 23 se modifica como sigue:
|
|
24) |
el artículo 24 se modifica como sigue:
|
|
25) |
el anexo I se sustituye por el texto que figura en el anexo I del presente Reglamento; |
|
26) |
el anexo II se modifica con arreglo a lo dispuesto en el anexo II del presente Reglamento; |
|
27) |
el anexo III se sustituye por el texto que figura en el anexo III del presente Reglamento; |
|
28) |
el anexo IV se sustituye por el texto que figura en el anexo IV del presente Reglamento; |
|
29) |
el anexo V se modifica con arreglo a lo dispuesto en el anexo V del presente Reglamento; |
|
30) |
el anexo VI se modifica con arreglo a lo dispuesto en el anexo VI del presente Reglamento; |
|
31) |
el anexo VII se modifica con arreglo a lo dispuesto en el anexo VII del presente Reglamento; |
|
32) |
el anexo VIII se modifica con arreglo a lo dispuesto en el anexo VIII del presente Reglamento; |
|
33) |
el anexo IX se sustituye por el texto que figura en el anexo IX del presente Reglamento; |
|
34) |
el anexo X se modifica con arreglo a lo dispuesto en el anexo X del presente Reglamento; |
|
35) |
el anexo X bis se sustituye por el texto que figura en el anexo XI del presente Reglamento; |
|
36) |
el texto del anexo XII del presente Reglamento se inserta como anexo X ter. |
El presente Reglamento entrará en vigor a los veinte días de su publicación en el Diario Oficial de la Unión Europea.
El presente Reglamento será aplicable a partir del 1 de julio de 2022.
No obstante lo dispuesto en el párrafo primero del presente artículo, para la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos de los grupos 1, 2, 3, 4, 5, 9, 10, 4v, 5v, 9v, 10v, 11, 12, y 16 definidos en el cuadro 1 del anexo I, distintos de los ZE-HDV, los He-HDV, los vehículos de combustible dual y los vehículos cuyo motor haya sido certificado con un sistema de recuperación del calor residual, de conformidad con el artículo 9, apartado 1, del Reglamento (UE) 2017/2400, el presente Reglamento será aplicable a partir del 1 de enero de 2024.
No obstante lo dispuesto en el párrafo primero del presente artículo, el artículo 1, punto 35, será aplicable a partir del 1 de enero de 2023.
El presente Reglamento será obligatorio en todos sus elementos y directamente aplicable en cada Estado miembro.
Hecho en Bruselas, el 5 de julio de 2022.
Por la Comisión
La Presidenta
Ursula VON DER LEYEN
(1) DO L 188 de 18.7.2009, p. 1.
(2) Reglamento (UE) 2017/2400 de la Comisión, de 12 de diciembre de 2017, por el que se desarrolla el Reglamento (CE) n.o 595/2009 del Parlamento Europeo y del Consejo en lo relativo a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos pesados, y por el que se modifican la Directiva 2007/46/CE del Parlamento Europeo y del Consejo y el Reglamento (UE) n.o 582/2011 de la Comisión (DO L 349 de 29.12.2017, p. 1).
(3) Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo, de 30 de mayo de 2018, sobre la homologación y la vigilancia del mercado de los vehículos de motor y sus remolques y de los sistemas, los componentes y las unidades técnicas independientes destinados a dichos vehículos, por el que se modifican los Reglamentos (CE) n.o 715/2007 y (CE) n.o 595/2009 y por el que se deroga la Directiva 2007/46/CE (DO L 151 de 14.6.2018, p. 1).
(4) Reglamento (UE) 2019/1242 del Parlamento Europeo y del Consejo, de 20 de junio de 2019, por el que se establecen normas de comportamiento en materia de emisiones de CO2 para vehículos pesados nuevos y se modifican los Reglamentos (CE) n.o 595/2009 y (UE) 2018/956 del Parlamento Europeo y del Consejo y la Directiva 96/53/CE del Consejo (DO L 198 de 25.7.2019, p. 202).
|
ANEXO I |
Clasificación de los vehículos en grupos de vehículos y método para determinar las emisiones de CO2 y el consumo de combustible de los autobuses pesados |
|
ANEXO II |
Requisitos y procedimientos relacionados con la utilización de la herramienta de simulación |
|
Apéndice 1 |
Modelo de ficha de características a efectos de la utilización de la herramienta de simulación con vistas a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos nuevos |
|
Apéndice 2 |
Modelo de licencia para utilizar la herramienta de simulación con vistas a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos nuevos |
|
ANEXO III |
Información de entrada relativa a las características del vehículo |
|
Apéndice 1 |
Tecnologías de vehículos a las que no se aplican las obligaciones establecidas en el artículo 9, apartado 1, párrafo primero, con arreglo a lo dispuesto en dicho párrafo |
|
ANEXO IV |
Modelo de los archivos de salida de la herramienta de simulación |
|
ANEXO V |
Verificación de los datos del motor |
|
Apéndice 1 |
Modelo de certificado de componente, unidad técnica independiente o sistema |
|
Apéndice 2 |
Ficha de características del motor |
|
Apéndice 3 |
Familia de motores en función del CO2 |
|
Apéndice 4 |
Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible |
|
Apéndice 5 |
Determinación del consumo de potencia de los componentes del motor |
|
Apéndice 6 |
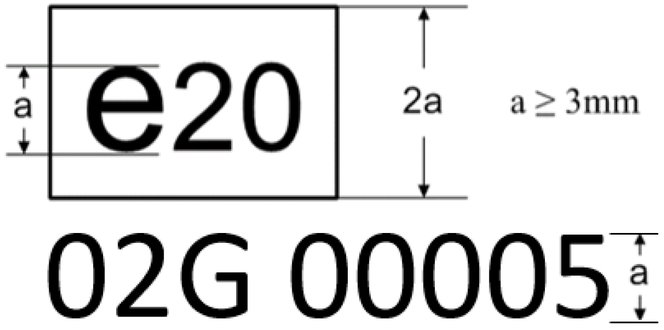
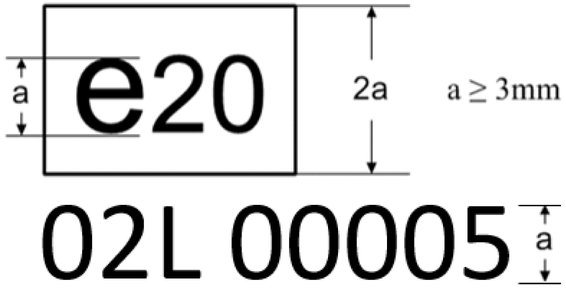
Marcados |
|
Apéndice 7 |
Parámetros de entrada de la herramienta de simulación |
|
Apéndice 8 |
Pasos y ecuaciones de evaluación importantes de la herramienta de preprocesamiento del motor |
|
ANEXO VI |
Verificación de los datos relativos a las transmisiones, los convertidores de par, otros componentes de transferencia de par y los componentes adicionales de la línea de transmisión |
|
Apéndice 1 |
Modelo de certificado de componente, unidad técnica independiente o sistema |
|
Apéndice 2 |
Ficha de características de la transmisión |
|
Apéndice 3 |
Ficha de características de un convertidor de par (TC) hidrodinámico |
|
Apéndice 4 |
Ficha de características de otros componentes de transferencia de par (OTTC) |
|
Apéndice 5 |
Ficha de características de componentes adicionales de la línea de transmisión (ADC) |
|
Apéndice 6 |
Concepto de familia |
|
Apéndice 7 |
Marcados y numeración |
|
Apéndice 8 |
Valores normalizados de la pérdida de par. Transmisión |
|
Apéndice 9 |
Modelo genérico. Convertidor de par |
|
Apéndice 10 |
Valores normalizados de la pérdida de par. Otros componentes de transferencia de par |
|
Apéndice 11 |
Valores normalizados de pérdida de par. Reenvío angular engranado o tren de transmisión con una relación de velocidad única |
|
Apéndice 12 |
Parámetros de entrada de la herramienta de simulación |
|
ANEXO VII |
Verificación de los datos del eje |
|
Apéndice 1 |
Modelo de certificado de componente, unidad técnica independiente o sistema |
|
Apéndice 2 |
Ficha de características del eje |
|
Apéndice 3 |
Cálculo de la pérdida normalizada de par |
|
Apéndice 4 |
Concepto de familia |
|
Apéndice 5 |
Marcados y numeración |
|
Apéndice 6 |
Parámetros de entrada de la herramienta de simulación |
|
ANEXO VIII |
Verificación de los datos de resistencia aerodinámica |
|
Apéndice 1 |
Modelo de certificado de componente, unidad técnica independiente o sistema |
|
Apéndice 2 |
Ficha de características de la resistencia aerodinámica |
|
Apéndice 3 |
Requisitos relativos a la altura del vehículo para camiones rígidos y tractocamiones |
|
Apéndice 4 |
Configuraciones estándar de carrocería y semirremolque para camiones rígidos y tractocamiones |
|
Apéndice 5 |
Familia de resistencia aerodinámica |
|
Apéndice 6 |
Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas |
|
Apéndice 7 |
Valores normalizados |
|
Apéndice 8 |
Marcados |
|
Apéndice 9 |
Parámetros de entrada de la herramienta de simulación |
|
ANEXO IX |
Verificación de los datos de los accesorios de camiones y autobuses |
|
ANEXO X |
Procedimiento de certificación de los neumáticos |
|
Apéndice 1 |
Modelo de certificado de componente, unidad técnica independiente o sistema |
|
Apéndice 2 |
Ficha de características del coeficiente de resistencia a la rodadura del neumático |
|
Apéndice 3 |
Parámetros de entrada de la herramienta de simulación |
|
Apéndice 4 |
Numeración |
|
ANEXO X bis |
Conformidad de la utilización de la herramienta de simulación y de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas: procedimiento de ensayo de verificación |
|
Apéndice 1 |
Principales etapas y ecuaciones de evaluación realizadas por la herramienta de simulación en una simulación del procedimiento de ensayo de verificación |
|
ANEXO X ter |
Certificación de los componentes de un tren de potencia eléctrico |
|
Apéndice 1 |
Modelo de certificado de componente, unidad técnica independiente o sistema |
|
Apéndice 2 |
Ficha de características de un sistema de máquina eléctrica |
|
Apéndice 3 |
Ficha de características de un IEPC |
|
Apéndice 4 |
Ficha de características de un IHPC de tipo 1 |
|
Apéndice 5 |
Ficha de características de un tipo de sistema de baterías o de un tipo de subsistema de baterías representativo |
|
Apéndice 6 |
Ficha de características de un tipo de sistema de condensadores o de un tipo de subsistema de condensadores representativo |
|
Apéndice 7 |
- |
|
Apéndice 8 |
Valores normalizados de un sistema de máquina eléctrica |
|
Apéndice 9 |
Valores normalizados de los IEPC |
|
Apéndice 10 |
Valores normalizados de SAEER |
|
Apéndice 11 |
- |
|
Apéndice 12 |
Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas |
|
Apéndice 13 |
Concepto de familia |
|
Apéndice 14 |
Marcados y numeración |
|
Apéndice 15 |
Parámetros de entrada de la herramienta de simulación |
|
ANEXO XI |
Modificaciones de la Directiva 2007/46/CE |
CLASIFICACIÓN DE LOS VEHÍCULOS EN GRUPOS DE VEHÍCULOS Y MÉTODO PARA DETERMINAR LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE LOS AUTOBUSES PESADOS
1. Clasificación de los vehículos a los efectos del presente Reglamento
|
1.1. |
Clasificación de los vehículos de la categoría N
Cuadro 1 Grupos de vehículos correspondientes a los camiones pesados
Cuadro 2 Grupos de vehículos correspondientes a los camiones medios
|
|
1.2. |
Clasificación de los vehículos de la categoría N |
|
1.2.1. |
Autobuses pesados |
|
1.2.2. |
Clasificación de los vehículos primarios
Cuadro 3 Grupos de vehículos correspondientes a los vehículos primarios
|
|
1.2.3. |
Clasificación de los vehículos completos o completados
La clasificación de los vehículos completos o completados que son autobuses pesados se basa en los seis criterios siguientes:
Figura 1 Flujo de decisión para determinar si un vehículo es «de acceso bajo» o no: 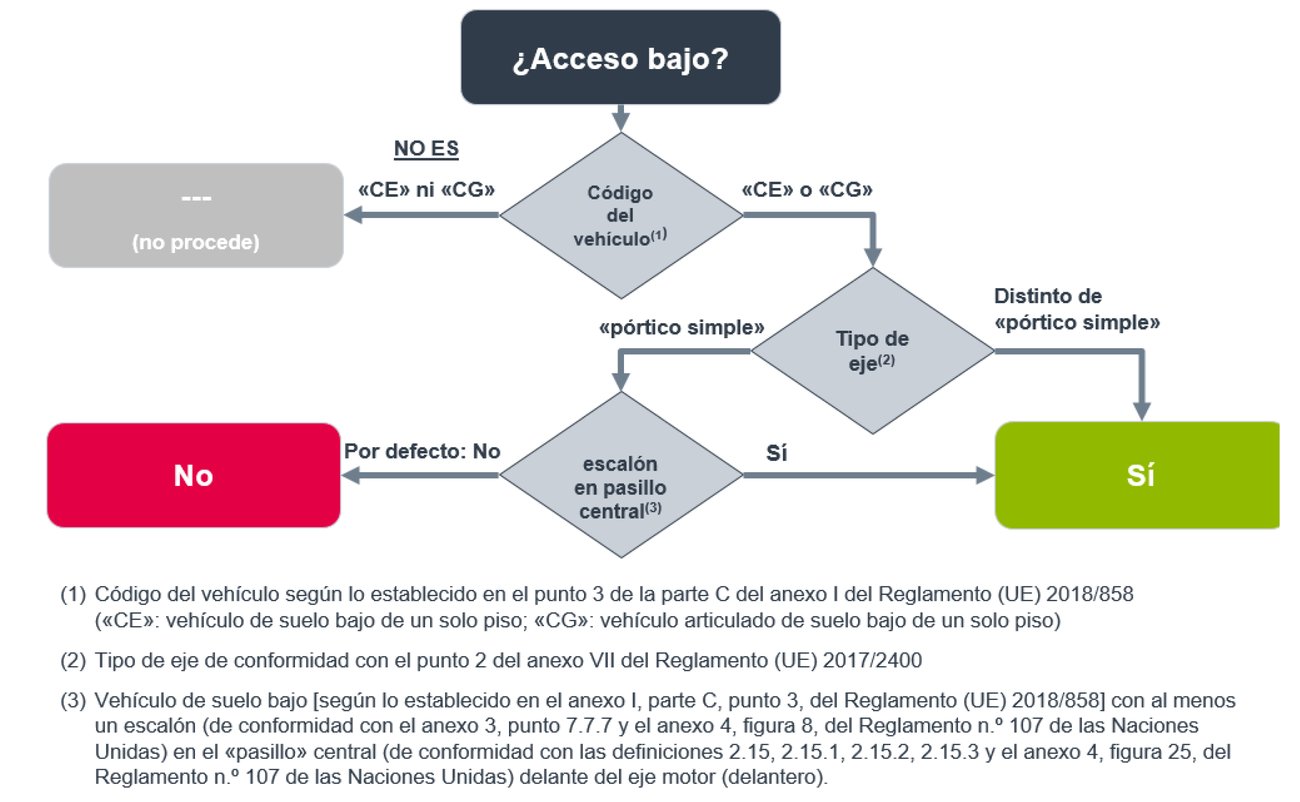
La clasificación correspondiente que debe utilizarse figura en los cuadros 4, 5 y 6. Cuadro 4 Grupos de vehículos correspondientes a los vehículos completos y vehículos completados que son autobuses pesados con 2 ejes
|
Cuadro 5
Grupos de vehículos correspondientes a los vehículos completos y vehículos completados que son autobuses pesados con 3 ejes
|
Descripción de los elementos pertinentes para la clasificación en grupos de vehículos |
Grupo de vehículos |
Atribución del perfil de finalidad |
||||||||||||||||
|
Número de ejes |
Configuración del chasis (solo explicación) |
Código del vehículo (*7) |
Clase del vehículo (*8) |
Acceso bajo (Código del vehículo CE o CG únicamente) |
Asientos de pasajeros en piso inferior (Código del vehículo CB o CD únicamente) |
Altura de la carrocería integrada en [mm] (Vehículos de la clase «II + III» únicamente) |
||||||||||||
|
I |
I + II o A |
II |
II + III |
III o B |
Urbano pesado |
Urbano |
Suburbano |
Interurbano |
Autocar |
|||||||||
|
3 |
rígido |
LF |
SD |
CE |
x |
x |
x |
|
|
no |
— |
— |
33 a |
x |
x |
x |
|
|
|
x |
x |
|
|
|
sí |
— |
— |
33b1 |
x |
x |
x |
|
|
|||||
|
|
|
x |
|
|
sí |
— |
— |
33b2 |
x |
x |
x |
x |
|
|||||
|
DD |
CF |
x |
x |
x |
|
|
— |
— |
— |
33c |
x |
x |
x |
|
|
|||
|
techo abierto |
SD |
CI |
x |
x |
x |
x |
x |
— |
— |
— |
33d |
x |
x |
x |
|
|
||
|
DD |
CJ |
x |
x |
x |
x |
x |
— |
— |
— |
33e |
x |
x |
x |
|
|
|||
|
HF |
SD |
CA |
|
|
x |
|
|
— |
— |
— |
34 a |
|
|
|
x |
x |
||
|
|
|
|
x |
|
— |
— |
≤ 3 100 |
34b |
|
|
|
x |
x |
|||||
|
|
|
|
x |
|
— |
— |
> 3 100 |
34c |
|
|
|
x |
x |
|||||
|
|
|
|
|
x |
— |
— |
— |
34d |
|
|
|
x |
x |
|||||
|
DD |
CB |
|
|
x |
x |
x |
— |
≤ 6 |
— |
34e |
|
|
|
x |
x |
|||
|
|
|
x |
x |
x |
— |
> 6 |
— |
34f |
|
|
|
x |
x |
|||||
|
articulado |
LF |
SD |
CG |
x |
x |
x |
|
|
no |
— |
— |
35 a |
x |
x |
x |
|
|
|
|
x |
x |
|
|
|
sí |
— |
— |
35b1 |
x |
x |
x |
|
|
|||||
|
|
|
x |
|
|
sí |
— |
— |
35b2 |
x |
x |
x |
x |
|
|||||
|
DD |
CH |
x |
x |
x |
|
|
— |
— |
— |
35c |
x |
x |
x |
|
|
|||
|
HF |
SD |
CC |
|
|
x |
|
|
— |
— |
— |
36 a |
|
|
|
x |
x |
||
|
|
|
|
x |
|
— |
— |
≤ 3 100 |
36b |
|
|
|
x |
x |
|||||
|
SD |
|
|
|
x |
|
— |
— |
> 3 100 |
36c |
|
|
|
x |
x |
||||
|
|
|
|
|
x |
— |
— |
— |
36d |
|
|
|
x |
x |
|||||
|
DD |
CD |
|
|
x |
x |
x |
— |
≤ 6 |
— |
36e |
|
|
|
x |
x |
|||
|
|
|
x |
x |
x |
— |
> 6 |
— |
36f |
|
|
|
x |
x |
Cuadro 6
Grupos de vehículos correspondientes a los vehículos completos y vehículos completados que son autobuses pesados con 4 ejes
|
Descripción de los elementos pertinentes para la clasificación en grupos de vehículos |
Grupo de vehículos |
Atribución del perfil de finalidad |
||||||||||||||||
|
Número de ejes |
Configuración del chasis (solo explicación) |
Código del vehículo (*9) |
Clase del vehículo (*10) |
Acceso bajo (Código del vehículo CE o CG únicamente) |
Asientos de pasajeros en piso inferior (Código del vehículo CB o CD únicamente) |
Altura de la carrocería integrada en [mm] (Vehículos de la clase «II + III» únicamente) |
||||||||||||
|
I |
I + II o A |
II |
II + III |
III o B |
Urbano pesado |
Urbano |
Suburbano |
Interurbano |
Autocar |
|||||||||
|
4 |
rígido |
LF |
SD |
CE |
x |
x |
x |
|
|
no |
— |
— |
37 a |
x |
x |
x |
|
|
|
x |
x |
|
|
|
sí |
— |
— |
37b1 |
x |
x |
x |
|
|
|||||
|
|
|
x |
|
|
sí |
— |
— |
37b2 |
x |
x |
x |
x |
|
|||||
|
DD |
CF |
x |
x |
x |
|
|
— |
— |
— |
37c |
x |
x |
x |
|
|
|||
|
techo abierto |
SD |
CI |
x |
x |
x |
x |
x |
— |
— |
— |
37d |
x |
x |
x |
|
|
||
|
DD |
CJ |
x |
x |
x |
x |
x |
— |
— |
— |
37e |
x |
x |
x |
|
|
|||
|
HF |
SD |
CA |
|
|
x |
|
|
— |
— |
— |
38 a |
|
|
|
x |
x |
||
|
|
|
|
x |
|
— |
— |
≤ 3 100 |
38b |
|
|
|
x |
x |
|||||
|
|
|
|
x |
|
— |
— |
> 3 100 |
38c |
|
|
|
x |
x |
|||||
|
|
|
|
|
x |
— |
— |
— |
38d |
|
|
|
x |
x |
|||||
|
DD |
CB |
|
|
x |
x |
x |
— |
≤ 6 |
— |
38e |
|
|
|
x |
x |
|||
|
|
|
x |
x |
x |
— |
> 6 |
— |
38f |
|
|
|
x |
x |
|||||
|
articulado |
LF |
SD |
CG |
x |
x |
x |
|
|
no |
— |
— |
39 a |
x |
x |
x |
|
|
|
|
x |
x |
|
|
|
sí |
— |
— |
39b1 |
x |
x |
x |
|
|
|||||
|
|
|
x |
|
|
sí |
— |
— |
39b2 |
x |
x |
x |
x |
|
|||||
|
DD |
CH |
x |
x |
x |
|
|
— |
— |
— |
39c |
x |
x |
x |
|
|
|||
|
HF |
SD |
CC |
|
|
x |
|
|
— |
— |
— |
40 a |
|
|
|
x |
x |
||
|
|
|
|
x |
|
— |
— |
≤ 3 100 |
40b |
|
|
|
x |
x |
|||||
|
SD |
|
|
|
x |
|
— |
— |
> 3 100 |
40c |
|
|
|
x |
x |
||||
|
|
|
|
|
x |
— |
— |
— |
40d |
|
|
|
x |
x |
|||||
|
DD |
CD |
|
|
x |
x |
x |
— |
≤ 6 |
— |
40e |
|
|
|
x |
x |
|||
|
|
|
x |
x |
x |
— |
> 6 |
— |
40f |
|
|
|
x |
x |
2. Método para determinar las emisiones de CO2 y el consumo de combustible de los autobuses pesados
|
2.1. |
En el caso de los autobuses pesados, las especificaciones del vehículo completo o completado, incluidas las propiedades de la carrocería final y de las unidades auxiliares, se reflejarán en los resultados de las emisiones de CO2 y el consumo de combustible. En el caso de autobuses pesados fabricados por etapas, puede que más de un fabricante participe en el proceso de generación de datos de entrada e información de entrada y en la utilización de la herramienta de simulación. En el caso de los autobuses pesados, las emisiones de CO2 y el consumo de combustible se basarán en dos simulaciones diferentes:
|
|
2.2. |
Si un fabricante homologa un autobús pesado como vehículo completo, las simulaciones se realizarán tanto para el vehículo primario como para el vehículo completo. |
|
2.3. |
En el caso del vehículo primario, la información de entrada de la herramienta de simulación incluye los datos de entrada relativos al motor, la transmisión, los neumáticos y la información de entrada de un subconjunto de unidades auxiliares (6). La clasificación en grupos de vehículos se lleva a cabo de conformidad con el cuadro 3 en función del número de ejes y de la información sobre si el vehículo es un autobús articulado o no. En las simulaciones del vehículo primario, la herramienta de simulación asigna un conjunto de cuatro carrocerías genéricas diferentes (carrocerías de piso alto y piso bajo, y de un solo piso y dos pisos) y simula los once perfiles de finalidad enumerados en el cuadro 3 para cada grupo de vehículos en dos condiciones de carga diferentes. Esto lleva a un conjunto de veintidós resultados para las emisiones de CO2 y el consumo de combustible de un autobús pesado primario. La herramienta de simulación genera el archivo de información del vehículo para la primera fase (VIF1), que contiene toda la información que es necesario transferir para la fase de fabricación subsiguiente. El VIF1 comprende todos los datos de entrada no confidenciales, los resultados en términos de consumo de energía (7) en [MJ/km], información sobre el fabricante del vehículo primario y los hashes correspondientes (8). |
|
2.4. |
El fabricante del vehículo primario pondrá el VIF1 a disposición del fabricante responsable de las fases de fabricación subsiguientes. Cuando un fabricante de un vehículo primario facilite datos que vayan más allá de los requisitos del vehículo primario establecidos en el anexo III, estos datos no influirán en los resultados de la simulación del vehículo primario, pero se harán constar en el VIF1 para su consideración en etapas posteriores. En el caso de un vehículo primario, la herramienta de simulación también genera un archivo de registros del fabricante. |
|
2.5. |
En el caso de un vehículo provisional, el fabricante provisional es responsable de un subconjunto de datos de entrada e información de entrada pertinentes para la carrocería final (9). Un fabricante de vehículos provisionales no solicita la certificación del vehículo completado. Un fabricante de vehículos provisionales deberá añadir o actualizar la información pertinente del vehículo completado y utilizar la herramienta de simulación para generar una versión actualizada y con los hashes correspondientes del archivo de información del vehículo (VIFi) (10). El VIFi se pondrá a disposición del fabricante responsable de las fases de fabricación subsiguientes. En el caso de los vehículos provisionales, el VIFi también comprende la tarea de documentación destinada a las autoridades de homologación. Los vehículos provisionales no se someten a simulaciones de emisiones de CO2 ni de consumo de combustible |
|
2.6. |
Si un fabricante realiza modificaciones de un vehículo provisional, completo o completado que requieran actualizaciones de los datos de entrada o de la información de entrada asignada al vehículo primario (por ejemplo, un cambio de eje o de neumáticos), el fabricante que realiza la modificación actúa como fabricante del vehículo primario con las responsabilidades correspondientes. |
|
2.7. |
En el caso de un vehículo completo o completado, el fabricante completará y, si es necesario, actualizará los datos de entrada y la información de entrada para la carrocería final correspondientes a la fase de fabricación previa que se le transmitieron en el VIFi y utilizará la herramienta de simulación para calcular las emisiones de CO2 y el consumo de combustible. Para las simulaciones en esta fase, los autobuses pesados se clasifican con arreglo a los seis criterios establecidos en el punto 1.2.3 en los grupos de vehículos enumerados en los cuadros 4, 5 y 6. Para determinar las emisiones de CO2 y el consumo de combustible de los vehículos completos o de los vehículos completados que son autobuses pesados, la herramienta de simulación lleva a cabo las siguientes etapas de cálculo:
|
(*1) EMS: European Modular System (Sistema Modular Europeo)
(*2) En estas clases de vehículos, los tractocamiones se consideran camiones rígidos, pero con su tara específica
(*3) Subgrupo «v» de los grupos de vehículos 4, 5, 9 y 10: estos perfiles de finalidad son aplicables exclusivamente a los vehículos profesionales
|
T |
= |
Tractocamión |
|
R |
= |
Camión rígido y carrocería estándar |
|
T1, T2 |
= |
Remolques estándar |
|
ST |
= |
Semirremolques estándar |
|
D |
= |
Dolly estándar |
(*4) EMS: European Modular System (Sistema Modular Europeo)
|
R |
= |
Carrocería estándar |
|
I |
= |
Furgoneta con su carrocería integrada |
|
FWD |
= |
Con tracción delantera |
|
RWD |
= |
Eje motor único que no es el eje delantero |
|
AWD |
= |
Más de un único eje motor |
(1) «P» indica la fase primaria de la clasificación; los dos números separados por una barra indican los números de los grupos de vehículos a los que el vehículo puede atribuirse en la fase de vehículo completo o completado.
(2) «piso bajo»: los códigos de vehículo «CE», «CF», «CG», «CH», tal como se establecen en el anexo I, parte C, punto 3, del Reglamento (UE) 2018/858.
«piso alto»: los códigos de vehículo «CA», «CB», «CC», «CD», tal como se establecen en el anexo I, parte C, punto 3, del Reglamento (UE) 2018/858.
(3) «SD»: vehículo de un solo piso; «DD»: vehículo de dos pisos.
(4) Reglamento n.o 107 de la Comisión Económica para Europa de las Naciones Unidas (CEPE), sobre disposiciones uniformes relativas a la homologación de vehículos de la categoría M2 o M3 por lo que respecta a sus características generales de construcción (DO L 52 de 23.2.2018, p. 1).
(5) Reglamento de Ejecución (UE) 2020/683 de la Comisión, de 15 de abril de 2020, por el que se desarrolla el Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo en lo que concierne a los requisitos administrativos para la homologación y la vigilancia del mercado de los vehículos de motor y sus remolques y de los sistemas, los componentes y las unidades técnicas independientes destinados a dichos vehículos (DO L 163 de 26.5.2020, p. 1).
(*5) De conformidad con el Reglamento (UE) 2018/858.
(*6) De conformidad con el punto 2 del Reglamento n.o 107 de las Naciones Unidas.
(*7) De conformidad con el Reglamento (UE) 2018/858.
(*8) De conformidad con el punto 2 del Reglamento n.o 107 de las Naciones Unidas.
(*9) De conformidad con el Reglamento (UE) 2018/858.
(*10) De conformidad con el punto 2 del Reglamento n.o 107 de las Naciones Unidas.
(6) Información de entrada y datos de entrada definidos en el anexo III para los vehículos primarios.
(7) No es necesario presentar los resultados correspondientes a las emisiones de CO2 y al consumo de combustible a través del VIF, ya que esta información puede calcularse a partir de los resultados relativos al consumo de energía y al tipo de combustible conocido.
(8) El contenido del VIF se especifica detalladamente en el anexo IV, parte III.
(9) El subconjunto de información de entrada y de datos de entrada aparece definido en el anexo III para vehículos completos y completados.
(10) «i» representa el número de fases de fabricación de las que consta el proceso hasta ese momento.
(11) Véase el Anexo IV, parte III, punto 1.1.
|
1) |
en el punto 1.1.1, la letra c) se sustituye por el texto siguiente:
|
|
2) |
el punto 2.1 se modifica como sigue:
|
|
3) |
en el apéndice 1, la SECCIÓN I se modifica como sigue:
|
|
4) |
en el apéndice 2, SECCIÓN I, los puntos 0.1, 0.2 y 0.3 se sustituyen por el texto siguiente:
|
(*1) DO L 349 de 29.12.2017, p. 1.».»
INFORMACIÓN DE ENTRADA RELATIVA A LAS CARACTERÍSTICAS DEL VEHÍCULO
1. Introducción
El presente anexo describe la lista de parámetros que debe proporcionar el fabricante de vehículos como información de entrada de la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y ejemplos de datos.
2. Definiciones
1) | “ID del parámetro”: identificador único utilizado en la herramienta de simulación para un parámetro de entrada o un conjunto de datos de entrada en concreto. |
2) | “Tipo”: tipo de datos del parámetro
|
3) | “Unidad” … unidad física del parámetro. |
4) | “Masa real del vehículo corregida”: masa especificada en la “masa real del vehículo” de conformidad con el Reglamento (UE) n.o 1230/2012 de la Comisión (*), con excepción del depósito o depósitos, que se llenarán al menos hasta el 50 % de su capacidad. Los sistemas que contienen líquidos se llenan al 100 % de la capacidad especificada por el fabricante, excepto los sistemas que contienen líquidos para las aguas residuales, que deben permanecer vacíos. En el caso de los camiones rígidos medios, los camiones rígidos pesados y los tractocamiones, la masa se determina sin superestructura y se corrige mediante el peso adicional del equipo estándar no instalado, tal como se especifica en el punto 4.3. La masa de una carrocería estándar, un semirremolque estándar o un remolque estándar para simular el vehículo completo o el conjunto completo de un vehículo y un remolque (o semirremolque) se añadirá automáticamente mediante la herramienta de simulación. Todas las piezas montadas en o sobre el bastidor principal se consideran piezas de superestructura si solo se instalan para facilitar una superestructura, con independencia de las piezas que son necesarias para las condiciones de orden de marcha. En el caso de los autobuses pesados que son vehículos primarios, no es aplicable la “masa real del vehículo corregida”, ya que el valor genérico de la masa es asignado por la herramienta de simulación. |
5) | “Altura de la carrocería integrada”: diferencia en la dirección “Z” entre la referencia del punto más alto “A” y la del punto más bajo “B” de una carrocería integrada (véase la figura 1). En el caso de los vehículos que se aparten del caso estándar, serán de aplicación los casos siguientes (véase la figura 2):
En todos los demás casos no cubiertos por el caso estándar o los casos especiales 1 a 4, la altura de la carrocería integrada es la diferencia entre el punto más alto del vehículo y el punto B. Este parámetro solo es pertinente para los autobuses pesados. Figura 1 Altura de la carrocería integrada. Caso estándar  Figura 2 Altura de la carrocería integrada. Casos especiales

|
6) | “Punto de referencia ‘A’”: punto más alto de la carrocería (figura 1). No se tendrán en cuenta los paneles de carrocería o diseño, los soportes para el montaje, por ejemplo, de los sistemas de calefacción, ventilación y aire acondicionado (HVAC), las escotillas y los artículos similares. |
7) | “Punto de referencia ‘B’”: punto más bajo del borde exterior inferior de la carrocería (figura 1). No se tendrán en cuenta los soportes, por ejemplo, para el montaje de los ejes. |
8) | “Longitud del vehículo”: dimensión del vehículo de conformidad con el cuadro I del apéndice 1 del anexo I del Reglamento (UE) n.o 1230/2012. Además, no se tendrán en cuenta los dispositivos de soporte de carga desmontables, los dispositivos de acoplamiento no desmontables ni cualquier otra parte exterior no desmontable que no afecte al espacio utilizable para los pasajeros. Este parámetro solo es pertinente para los autobuses pesados. |
9) | “Anchura del vehículo”: dimensión del vehículo de conformidad con el cuadro II del apéndice 1 del anexo I del Reglamento (UE) n.o 1230/2012. Los dispositivos de soporte de carga desmontables, los dispositivos de acoplamiento no desmontables o cualquier otra parte exterior no desmontable que no afecte al espacio utilizable para los pasajeros no se tendrán en cuenta, al apartarse de tales disposiciones. |
10) | “Altura de la entrada en posición de no inclinación”: nivel del piso en el primer hueco de la puerta por encima del suelo, medido en la puerta más avanzada del vehículo cuando este está en posición de no inclinación. |
11) | “Pila de combustible”: convertidor de energía que transforma la energía química (entrada) en energía eléctrica (salida), o viceversa. |
12) | “Vehículo de pilas de combustible”: vehículo equipado con un tren de potencia que contiene exclusivamente una o varias pilas de combustible y una o varias máquinas eléctricas como convertidores de la energía de propulsión. |
13) | “Vehículo híbrido de pilas de combustible”: vehículo de pilas de combustible equipado con un tren de potencia que contiene al menos un sistema de almacenamiento de combustible y al menos un sistema de almacenamiento de energía eléctrica recargable como sistemas de almacenamiento de la energía de propulsión. |
14) | “Vehículo ICE puro”: vehículo en el que la totalidad de los convertidores de la energía de propulsión son motores de combustión interna. |
15) | “Máquina eléctrica”: convertidor de energía que transforma la energía eléctrica en energía mecánica. |
16) | “Sistema de almacenamiento de energía”: sistema que almacena energía y la libera de la misma forma que entró. |
17) | “Sistema de almacenamiento de la energía de propulsión”: sistema de almacenamiento de energía del tren de potencia que no es un dispositivo periférico y cuya energía de salida se utiliza directa o indirectamente para propulsar el vehículo. |
18) | “Categoría de sistema de almacenamiento de la energía de propulsión”: sistema de almacenamiento de combustible, sistema de almacenamiento de energía eléctrica recargable (SAEER), o sistema de almacenamiento de energía mecánica recargable. |
19) | “Posición baja”: posición en el tren de potencia del vehículo más próxima a las ruedas que la posición de referencia real. |
20) | “Tren de transmisión”: elementos conectados del tren de potencia destinados a transmitir la energía mecánica entre los convertidores de la energía de propulsión y las ruedas. |
21) | “Convertidor de energía”: sistema en el que la forma de energía de salida es diferente de la forma de energía de entrada. |
22) | “Convertidor de la energía de propulsión”: convertidor de energía del tren de potencia que no es un dispositivo periférico y cuya energía de salida se utiliza directa o indirectamente para propulsar el vehículo. |
23) | “Categoría de convertidor de la energía de propulsión”: un motor de combustión interna, una máquina eléctrica o una pila de combustible. |
24) | “Forma de energía”: energía eléctrica, energía mecánica, o energía química (incluidos los combustibles). |
25) | “Sistema de almacenamiento de combustible”: sistema de almacenamiento de la energía de propulsión que almacena energía química como combustible líquido o gaseoso. |
26) | “Vehículo híbrido” o “VH”: vehículo equipado con un tren de potencia que contiene por lo menos dos categorías diferentes de convertidores de la energía de propulsión y por lo menos dos categorías diferentes de sistemas de almacenamiento de la energía de propulsión. |
27) | “Vehículo eléctrico híbrido” o “VEH”: vehículo híbrido en el que uno de los convertidores de la energía de propulsión es una máquina eléctrica y el otro es un motor de combustión interna. |
28) | “Vehículo eléctrico híbrido en serie”: un vehículo eléctrico híbrido en cuya arquitectura del tren de potencia el ICE impulsa uno o más trayectos de conversión de la energía eléctrica sin conexión mecánica entre el ICE y las ruedas del vehículo. |
29) | “Motor de combustión interna” o “ICE”: convertidor de energía con oxidación intermitente o continua del carburante que transforma la energía química en mecánica. |
30) | “Vehículo eléctrico híbrido con carga exterior” o “VEH-CCE”: vehículo eléctrico híbrido que puede cargarse desde una fuente externa. |
31) | “Vehículo eléctrico híbrido paralelo”: vehículo eléctrico híbrido en cuya arquitectura del tren de potencia el ICE impulsa una única trayectoria conectada mecánicamente entre el motor y las ruedas del vehículo. |
32) | “Dispositivos periféricos”: dispositivos que consumen, convierten, almacenan o suministran energía que no se utiliza directa o indirectamente para la propulsión del vehículo, pero que son esenciales para el funcionamiento del tren de potencia. |
33) | “Tren de potencia”: combinación total en un vehículo de los sistemas de almacenamiento de la energía de propulsión, los convertidores de la energía de propulsión y los trenes de transmisión que proporcionan la energía mecánica a las ruedas para propulsar el vehículo, junto con los dispositivos periféricos. |
34) | “Vehículo eléctrico puro” o “VEP”: un vehículo de motor con arreglo al artículo 3, apartado 16, del Reglamento (UE) 2018/858, equipado con un tren de potencia que contiene exclusivamente máquinas eléctricas como convertidores de la energía de propulsión y exclusivamente sistemas de almacenamiento de energía eléctrica recargables como sistemas de almacenamiento de la energía de propulsión o, como alternativa, cualquier otro medio de alimentación directa conductiva o inductiva de energía eléctrica procedente de la red eléctrica que suministra la energía de propulsión al vehículo de motor. |
35) | “Posición alta”: posición en el tren de potencia del vehículo más alejada de las ruedas que la posición de referencia real. |
36) | “IEPC”: componente integrado de tren de potencia eléctrico con arreglo al punto 2, subpunto 36, del anexo X ter. |
37) | “IHPC de tipo 1”: componente integrado de tren de potencia de vehículo eléctrico híbrido de tipo 1, con arreglo al punto 2, subpunto 38, del anexo X ter. |
3. Conjunto de parámetros de entrada
En los cuadros 1 a 11 se especifican los conjuntos de parámetros de entrada que deben facilitarse en relación con las características del vehículo. Se definen diferentes conjuntos en función del caso de aplicación (camiones medios, camiones pesados y autobuses pesados).
En el caso de los autobuses pesados, se hace una diferenciación entre los parámetros de entrada que deben facilitarse para las simulaciones en el vehículo primario y para las simulaciones en el vehículo completo o el vehículo completado. Serán de aplicación las disposiciones siguientes:
— | Los fabricantes de vehículos primarios facilitarán todos los parámetros enumerados en la columna del vehículo primario. |
— | Además, los fabricantes de vehículos primarios pueden proporcionar parámetros de entrada adicionales relacionados con el vehículo completo o completado, que pueden determinarse ya en esta fase inicial. En este caso, se facilitará información sobre “Manufacturer” (P235), “Manufacturer Address” (P252), “VIN” (P238) y “Date” (P239) tanto para el conjunto de parámetros de entrada primarios como para el conjunto de parámetros de entrada adicionales. |
— | Los fabricantes provisionales proporcionarán parámetros de entrada relacionados con el vehículo completo o completado que puedan determinarse en esta fase y que estén bajo su responsabilidad. Si se actualiza un parámetro ya facilitado en una fase de fabricación anterior, deberá especificarse todo el estado del parámetro (por ejemplo, si se añade una segunda bomba de calor al vehículo, se proporcionará la tecnología de ambos sistemas). La información sobre “Manufacturer” (P235), “Manufacturer Address” (P252), “VIN” (P238) y “Date” (P239) será facilitada por los fabricantes provisionales en todos los casos. |
— | Los fabricantes del vehículo completado proporcionarán parámetros de entrada que puedan determinarse en esta fase y que estén bajo su responsabilidad. Para las actualizaciones necesarias de los parámetros ya facilitados en fases de fabricación anteriores, serán de aplicación las mismas disposiciones que para los fabricantes provisionales. En todos los casos se facilitará información sobre “Manufacturer” (P235), “Manufacturer Address” (P252), “VIN” (P238), “Date” (P239) y “Corrected Actual Mass” (P038). Para poder llevar a cabo las simulaciones necesarias, el conjunto de datos consolidados de todas las fases de fabricación deberá contener toda la información enumerada en la columna correspondiente al vehículo completo o el vehículo completado. |
— | Los fabricantes relacionados con la fase de vehículo completo proporcionarán todos los parámetros de entrada. Se facilitará información sobre “Manufacturer” (P235), “Manufacturer Address” (P252), “VIN” (P238) y “Date” (P239) tanto para los parámetros de entrada primarios como para los parámetros de entrada del vehículo completo. |
— | Se remitirá el parámetro “VehicleDeclarationType” (P293) en todas las fases de fabricación que proporcionen cualquiera de los parámetros enumerados para el vehículo completo o completado. |
Cuadro 1
Parámetros de entrada “Vehicle/General”
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Camiones pesados | Camiones medios | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo o completado) |
Manufacturer | P235 | Token | [-] |
| X | X | X | X |
Manufacturer Address | P252 | Token | [-] |
| X | X | X | X |
Model_CommercialName | P236 | Token | [-] |
| X | X | X | X |
VIN | P238 | Token | [-] |
| X | X | X | X |
Date | P239 | Date Time | [-] | Fecha y hora en que se crea la información de entrada y los datos de entrada | X | X | X | X |
Legislative Category | P251 | String | [-] | Valores permitidos: “N2”, “N3”, “M3” | X | X | X | X |
ChassisConfiguration | P036 | String | [-] | Valores permitidos: “Rigid Lorry”, “Tractor”, “Van”, “Bus” | X | X | X |
|
AxleConfiguration | P037 | String | [-] | Valores permitidos: “4 × 2”, “4 × 2F”, “6 × 2”, “6 × 4”, “8 × 2”, “8 × 4” donde “4 × 2F” se refiere a los vehículos 4 × 2 con eje delantero motor | X | X | X |
|
Articulated | P281 | boolean |
| Con arreglo al artículo 3, punto 37 |
|
| X |
|
CorrectedActualMass | P038 | Int | [kg] | De acuerdo con la “masa real del vehículo corregida”, tal como se especifica en el punto 2, subpunto 4 | X | X |
| X |
TechnicalPermissibleMaximum LadenMass | P041 | int | [kg] | De conformidad con el artículo 2, punto 7, del Reglamento (UE) n.o 1230/2012 | X | X | X | X |
IdlingSpeed | P198 | int | [1/min] | De acuerdo con el punto 7.1 En el caso de los VEP, no se requiere ningún dato. | X | X | X |
|
RetarderType | P052 | string | [-] | Valores permitidos: “None”, “Losses included in Gearbox”, “Engine Retarder”, “Transmission Input Retarder”, “Transmission Output Retarder”, “Axlegear Input Retarder” “Axlegear Input Retarder” es aplicable únicamente a las arquitecturas del tren de potencia “E3”, “S3”, “S-IEPC” y “E-IEPC” | X | X | X |
|
RetarderRatio | P053 | double, 3 | [-] | Relación de multiplicación de conformidad con el cuadro 2 del anexo VI | X | X | X |
|
AngledriveType | P180 | string | [-] | Valores permitidos: “None”, “Losses included in Gearbox”, “Separate Angledrive” | X | X | X |
|
PTOShafts GearWheels (1) | P247 | string | [-] | Valores permitidos: “none”, “only the drive shaft of the PTO”, “drive shaft and/or up to 2 gear wheels”, “drive shaft and/or more than 2 gear wheels”, “only one engaged gearwheel above oil level”, “PTO which includes 1 or more additional gearmesh(es), without disconnect clutch” | X |
|
|
|
PTOOther Elements (1) | P248 | string | [-] | Valores permitidos: “none”, “shift claw, synchroniser, sliding gearwheel”, “multi-disc clutch”, “multi-disc clutch, oil pump” | X |
|
|
|
CertificationNumberEngine | P261 | token | [-] | Solo aplicable si el componente está presente en el vehículo | X | X | X |
|
CertificationNumberGearbox | P262 | token | [-] | Solo aplicable si el componente está presente en el vehículo y se facilitan datos de entrada certificados | X | X | X |
|
CertificationNumberTorqueconverter | P263 | token | [-] | Solo aplicable si el componente está presente en el vehículo y se facilitan datos de entrada certificados | X | X | X |
|
CertificationNumberAxlegear | P264 | token | [-] | Solo aplicable si el componente está presente en el vehículo y se facilitan datos de entrada certificados | X | X | X |
|
CertificationNumberAngledrive | P265 | token | [-] | Se refiere al componente ADC certificado instalado en la posición del reenvío angular. Solo aplicable si el componente está presente en el vehículo y se facilitan datos de entrada certificados | X | X | X |
|
CertificationNumberRetarder | P266 | token | [-] | Solo aplicable si el componente está presente en el vehículo y se facilitan datos de entrada certificados | X | X | X |
|
Certificación NumberAirdrag | P268 | token | [-] | Solo aplicable si se facilitan datos de entrada certificados. | X | X |
| X |
AirdragModifiedMultiphase | P334 | boolean | [-] | Dato necesario para todas las fases de fabricación posteriores a una primera entrada del componente de resistencia aerodinámica. Si el parámetro se ha fijado en “true” sin incluir un componente de resistencia aerodinámica certificado, la herramienta de simulación aplica valores normalizados con arreglo al anexo VIII. |
|
|
| X |
Certification NumberIEPC | P351 | token | [-] | Solo aplicable si el componente está presente en el vehículo y se facilitan datos de entrada certificados | X | X | X |
|
ZeroEmissionVehicle | P269 | boolean | [-] | Como se define en el artículo 3, punto 15 | X | X | X |
|
VocationalVehicle | P270 | boolean | [-] | De conformidad con el artículo 3, punto 9, del Reglamento (UE) 2019/1242 | X |
|
|
|
NgTankSystem | P275 | string | [-] | Valores permitidos: “Compressed”, “Liquefied” Solo pertinente para vehículos cuyo motor utiliza combustible de tipo “NG PI” y “NG CI” (P193) Cuando ambos sistemas de depósito estén presentes en un vehículo, el sistema capaz de contener la mayor cantidad de energía del combustible se declarará como entrada para la herramienta de simulación. | X | X |
| X |
Sleepercab | P276 | boolean | [-] |
| X |
|
|
|
ClassBus | P282 | string | [-] | Valores permitidos: “I”, “I + II”, “A”, “II”, “II+III”, “III”, “B”, de conformidad con el punto 2 del Reglamento n.o 107 de las Naciones Unidas |
|
|
| X |
NumberPassengersSeatsLowerDeck | P283 | int | [-] | Número de asientos de pasajeros, excluidos los asientos del conductor y de la tripulación. En el caso de un vehículo de dos pisos, este parámetro se utilizará para declarar los asientos de pasajeros del piso inferior. En el caso de un vehículo de un solo piso, este parámetro se utilizará para declarar el número total de asientos de pasajeros. |
|
|
| X |
NumberPassengersStandingLowerDeck | P354 | int | [-] | Número de pasajeros de pie registrados En el caso de un vehículo de dos pisos, este parámetro se utilizará para declarar a los pasajeros de pie registrados en el piso inferior. En el caso de los vehículos de un solo piso, este parámetro se utilizará para declarar el número total de pasajeros de pie registrados. |
|
|
| X |
NumberPassengersSeatsUpperDeck | P284 | int | [-] | Número de asientos de pasajeros, excluidos los asientos del conductor y de la tripulación, del piso superior en un vehículo de dos pisos. En el caso de los vehículos de un solo piso se indicará “0”. |
|
|
| X |
NumberPassengersStandingUpperDeck | P355 | int | [-] | Número de pasajeros registrados de pie en el piso superior de un vehículo de dos pisos. En el caso de los vehículos de un solo piso se indicará “0”. |
|
|
| X |
BodyworkCode | P285 | int | [-] | Valores permitidos: “CA”, “CB”, “CC”, “CD”, “CE”, “CF”, “CG”, “CH”, “CI”, “CJ”, de conformidad con el anexo I, parte C, punto 3, del Reglamento (UE) 2018/585. En el caso de los chasis de autobús con el código de vehículo CX, no se indicará ningún dato. |
|
|
| X |
LowEntry | P286 | boolean | [-] | “low entry” de conformidad con el punto 1.2.2.3 del anexo I |
|
|
| X |
HeitIntegratedBody | P287 | int | [mm] | de conformidad con el punto 2, subpunto 5 |
|
|
| X |
VehicleLength | P288 | int | [mm] | de conformidad con el punto 2, subpunto 8 |
|
|
| X |
VehicleWidth | P289 | int | [mm] | de conformidad con el punto 2, subpunto 9 |
|
|
| X |
EntranceHeight | P290 | int | [mm] | de conformidad con el punto 2, subpunto 10 |
|
|
| X |
DoorDriveTechnology | P291 | string | [-] | Valores permitidos: “pneumatic”, “electric”, “mixed” |
|
|
| X |
Cargo volume | P292 | double, 3 | [m3] | Solo pertinente para vehículos con una configuración del chasis tipo “furgoneta” |
| X |
|
|
VehicleDeclarationType | P293 | string | [-] | Valores permitidos: “interim”, “final” |
|
|
| X |
VehicleTypeApprovalNumber | P352 | token | [-] | Número de homologación de tipo de vehículo entero En el caso de homologaciones de vehículos individuales, el número de homologación de vehículo individual | X | X |
| X |
Cuadro 2
Parámetros de entrada “Vehicle/AxleConfiguration” por eje de ruedas
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Camiones pesados | Camiones medios | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo o completado) |
Twin Tyres | P045 | boolean | [-] |
| X | X | X |
|
Axle Type | P154 | string | [-] | Valores permitidos: “VehicleNonDriven”, “VehicleDriven” | X | X | X |
|
Steered | P195 | boolean |
| Solo se declararán como “steered” los ejes de dirección activos | X | X | X |
|
Certification NumberTyre | P267 | token | [-] |
| X | X | X |
|
Los cuadros 3 y 3 bis contienen las listas de parámetros de entrada relativos a las unidades auxiliares. Las definiciones técnicas para determinar estos parámetros figuran en el anexo IX. El ID del parámetro se utiliza para proporcionar una referencia clara para los parámetros de ambos anexos III y IX.
Cuadro 3
Parámetros de entrada “Vehicle/Auxilaries” para camiones medios y camiones pesados
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
EngineCoolingFan/Technology | P181 | string | [-] | Valores permitidos: “Crankshaft mounted - Electronically controlled visco clutch”, “Crankshaft mounted - Bimetallic controlled visco clutch”, “Crankshaft mounted - Discrete step clutch”, “Crankshaft mounted - On/off clutch”, “Belt driven or driven via transmission - Electronically controlled visco clutch”, “Belt driven or driven via transmission - Bimetallic controlled visco clutch”, “Belt driven or driven via transmission - Discrete step clutch”, “Belt driven or driven via transmission - On/off clutch”, “Hydraulic driven - Variable displacement pump”, “Hydraulic driven - Constant displacement pump”, “Electrically driven - Electronically controlled” |
SteeringPump/Technology | P182 | string | [-] | Valores permitidos: “Fixed displacement”, “Fixed displacement with elec. control”, “Dual displacement”, “Dual displacement with elec. control”“Variable displacement mech. controlled”, “Variable displacement elec. controlled”, “Electric driven pump”, “Full electric steering gear” En el caso de VEP o VEH con una configuración del tren de potencia “S” o “S-IEPC” de conformidad con el punto 10.1.1, “Electric driven pump” o “Full electric steering gear” son los únicos valores permitidos. Se requiere una entrada aparte por cada eje de ruedas de dirección activo. |
ElectricSystem/Technology | P183 | string | [-] | Valores permitidos: “Standard technology”, “Standard technology - LED headlights, all”; |
PneumaticSystem/Technology | P184 | string | [-] | Valores permitidos: “Small”, “Small + ESS”, “Small + visco clutch ”, “Small + mech. clutch”, “Small + ESS + AMS”, “Small + visco clutch + AMS”, “Small + mech. clutch + AMS”, “Medium Supply 1-stage”, “Medium Supply 1-stage + ESS”, “Medium Supply 1-stage + visco clutch”, “Medium Supply 1-stage + mech. clutch”, “Medium Supply 1-stage + ESS + AMS”, “Medium Supply 1-stage + visco clutch + AMS”, “Medium Supply 1-stage + mech. clutch + AMS”, “Medium Supply 2-stage”, “Medium Supply 2-stage + ESS”, “Medium Supply 2-stage + visco clutch ”, “Medium Supply 2-stage + mech. clutch”, “Medium Supply 2-stage + ESS + AMS”, “Medium Supply 2-stage + visco clutch + AMS”, “Medium Supply 2-stage + mech. clutch + AMS”, “Large Supply”, “Large Supply + ESS”, “Large Supply + visco clutch ”, “Large Supply + mech. clutch”, “Large Supply + ESS + AMS”, “Large Supply + visco clutch + AMS”, “Large Supply + mech. clutch + AMS”, “Vacuum pump”, “Small + elec. driven”, “Small + ESS + elec. driven ”, “Medium Supply 1-stage + elec. driven”, “Medium Supply 1-stage + AMS + elec. driven”, “Medium Supply 2-stage + elec. driven”, “Medium Supply 2-stage + AMS + elec. driven”, “Large Supply + elec. driven”, “Large Supply + AMS + elec. driven”, “Vacuum pump + elec. driven”. En el caso de los VEP, solo las tecnologías “elec. driven” son valores permitidos. |
HVAC/Technology | P185 | string | [-] | Valores permitidos: “None”, “Default” |
Cuadro 3 bis
Parámetros de entrada “Vehicle/Auxiliaries” para autobuses pesados
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo o completado) |
EngineCoolingFan/Technology | P181 | string | [-] | Valores permitidos: “Crankshaft mounted - Electronically controlled visco clutch”, “Crankshaft mounted - Bimetallic controlled visco clutch”, “Crankshaft mounted - Discrete step clutch 2 stages”, “Crankshaft mounted - Discrete step clutch 3 stages”, “Crankshaft mounted - On/off clutch”, “Belt driven or driven via transmission - Electronically controlled visco clutch”, “Belt driven or driven via transmission - Bimetallic controlled visco clutch”, “Belt driven or driven via transmission - Discrete step clutch 2 stages”, “Belt driven or driven via transmission - Discrete step clutch 3 stages”, “Belt driven or driven via transmission - On/off clutch”, “Hydraulic driven - Variable displacement pump”, “Hydraulic driven - Constant displacement pump”, “Electrically driven - Electronically controlled” | X |
|
SteeringPump/Technology | P182 | string | [-] | Valores permitidos: “Fixed displacement”, “Fixed displacement with elec. control”, “Dual displacement”, “Dual displacement with elec. control”, “Variable displacement mech. controlled”, “Variable displacement elec. controlled”, “Electric driven pump”, “Full electric steering gear”. En el caso de VEP o VEH con una configuración del tren de potencia “S” o “S-IEPC” de conformidad con el punto 10.1.1, solo se admitirán los valores “Electric driven pump” o “Full electric steering gear”. Se requiere una entrada aparte por cada eje de ruedas de dirección activo. | X |
|
ElectricSystem/AlternatorTechnology | P294 | string | [-] | Valores permitidos: “convencional”, “inteligente”, “sin alternador”. Entrada única por vehículo. En el caso de los vehículos ICE puros, solo se permiten los valores “conventional” o “smart”. En el caso de los VEH con una configuración del tren de potencia “S” o “S-IEPC” de conformidad con el punto 10.1.1, solo se permiten los valores “no alternator” o “conventional”. | X |
|
ElectricSystem/SmartAlternatorRatedCurrent | P295 | integer | [A] | Una entrada aparte para cada alternador inteligente | X |
|
ElectricSystem/SmartAlternatorRatedVoltage | P296 | Integer | [V] | Valores permitidos: “12”, “24”, “48”. Una entrada aparte para cada alternador inteligente. | X |
|
ElectricSystem/SmartAlternatorBatteryTechnology | P297 | string | [-] | Valores permitidos: “lead-acid battery – conventional”, “lead-acid battery –AGM”, “lead-acid battery – gel”, “li-ion battery - high power”, “li-ion battery - high energy”. Una entrada aparte para cada batería cargada por el sistema con alternador inteligente. | X |
|
ElectricSystem/SmartAlternatorBatteryNominalVoltage | P298 | Integer | [V] | Valores permitidos: “12”, “24”, “48”. Cuando las baterías estén configuradas en serie (por ejemplo, dos unidades de 12 V para un sistema de 24 V), se proporcionará la tensión nominal real de las unidades individuales de batería (12 V en este ejemplo). Una entrada aparte para cada batería cargada por el sistema con alternador inteligente. | X |
|
ElectricSystem/SmartAlternatorBatteryRatedCapacity | P299 | Integer | [Ah] | Una entrada aparte para cada batería cargada por el sistema con alternador inteligente | X |
|
ElectricSystem/SmartAlternatorCapacitorTechnology | P300 | string | [-] | Valores permitidos: “with DCDC converter”. Una entrada aparte para cada condensador cargado por el sistema con alternador inteligente. | X |
|
ElectricSystem/SmartAlternatorCapacitorRatedCapacitance | P301 | integer | [F] | Una entrada aparte para cada condensador cargado por el sistema con alternador inteligente | X |
|
ElectricSystem/SmartAlternatorCapacitorRatedVoltage | P302 | Integer | [V] | Una entrada aparte para cada condensador cargado por el sistema con alternador inteligente | X |
|
ElectricSystem/SupplyFromHEVPossible | P303 | boolean | [-] |
| X |
|
ElectricSystem/InteriorlightsLED | P304 | boolean | [-] |
|
| X |
ElectricSystem/DayrunninglightsLED | P305 | boolean | [-] |
|
| X |
ElectricSystem/PositionlightsLED | P306 | boolean | [-] |
|
| X |
ElectricSystem/BrakelightsLED | P307 | boolean | [-] |
|
| X |
ElectricSystem/HeadlightsLED | P308 | boolean | [-] |
|
| X |
PneumaticSystem/SizeOfAirSupply | P309 | string | [-] | Valores permitidos: “Small”, “Medium Supply 1-stage”, “Medium Supply 2-stage”, “Large Supply 1-stage”, “Large Supply 2-stage”, “not applicable”. En el caso del compresor accionado eléctricamente se indicará “not applicable”. En el caso de los VEP, no se requiere ningún dato. | X |
|
PneumaticSystem/CompressorDrive | P310 | string | [-] | Valores permitidos: “mechanically”, “electrically”. En el caso de los VEP, solo se admite el valor “electronically”. | X |
|
PneumaticSystem/Clutch | P311 | string | [-] | Valores permitidos: “none”, “visco”, “mechanically”. En el caso de los VEP, no se requiere ningún dato. | X |
|
PneumaticSystem/SmartRegenerationSystem | P312 | boolean | [-] |
| X |
|
PneumaticSystem/SmartCompressionSystem | P313 | boolean | [-] | En el caso de los VEP o los VEH con una configuración del tren de potencia “S” o “S-IEPC” de conformidad con el punto 10.1.1, no se requiere ninguna entrada. | X |
|
PneumaticSystem/Ratio Compressor ToEngine | P314 | double, 3 | [-] | En el caso del compresor accionado eléctricamente se indicará “0.000”. En el caso de los VEP, no se requiere ningún dato. | X |
|
PneumaticSystem/Air suspension control | P315 | string | [-] | Valores permitidos: “mechanically”, “electronically” | X |
|
PneumaticSystem/SCRReagentDosing | P316 | boolean | [-] |
| X |
|
HVAC/SystemConfiguration | P317 | int | [-] | Valores permitidos: de “0” a “10”. En el caso de un sistema HVAC incompleto, se indicará “0”. No se indicará “0” para los vehículos completos o completados. |
| X |
HVAC/ HeatPumpTypeDriverCompartmentCooling | P318 | string | [-] | Valores permitidos: “none”, “not applicable”, “R-744”, “non R-744 2-stage”, “non R-744 3-stage”, “non R-744 4-stage”, “non R-744 continuous”. Se indicará “not applicable” para las configuraciones 6 y 10 del sistema HVAC debidas al suministro de la bomba de calor para pasajeros. |
| X |
HVAC/ HeatPumpTypeDriverCompartmentHeating | P319 | string | [-] | Valores permitidos: “none”, “not applicable”, “R-744”, “non R-744 2-stage”, “non R-744 3-stage”, “non R-744 4-stage”, “non R-744 continuous”. Se indicará “not applicable” para las configuraciones 6 y 10 del sistema HVAC debidas al suministro de la bomba de calor para pasajeros. |
| X |
HVAC/ HeatPumpTypePassengerCompartmentCooling | P320 | string | [-] | Valores permitidos: “none”, “R-744”, “non R-744 2-stage”, “non R-744 3-stage”, non R-744 4-stage”, “non R-744 continuous”. En el caso de bombas de calor múltiples con diferentes tecnologías de refrigeración del compartimento de pasajeros, se declarará la tecnología predominante (por ejemplo, en función de la potencia disponible o del uso preferido en funcionamiento). |
| X |
HVAC/ HeatPumpTypePassengerCompartmentHeating | P321 | string | [-] | Valores permitidos: “none”, “R-744”, “non R-744 2-stage”, “non R-744 3-stage”, non R-744 4-stage”, “non R-744 continuous”. En el caso de bombas de calor múltiples con diferentes tecnologías de calefacción del compartimento de pasajeros, se declarará la tecnología predominante (por ejemplo, en función de la potencia disponible o del uso preferido en funcionamiento). |
| X |
HVAC/AuxiliaryHeaterPower | P322 | integer | [W] | Indíquese “0” si no se ha instalado ningún calefactor accesorio. |
| X |
HVAC/Double glazing | P323 | boolean | [-] |
|
| X |
HVAC/AdjustableCoolantThermostat | P324 | boolean | [-] |
| X |
|
HVAC/AdjustableAuxiliaryHeater | P325 | boolean | [-] |
|
| X |
HVAC/EngineWasteGasHeatExchanger | P326 | boolean | [-] | En el caso de los VEP, no se requiere ningún dato. | X |
|
HVAC/SeparateAirDistributionDucts | P327 | boolean | [-] |
|
| X |
HVAC/WaterElectricHeater | P328 | boolean | [-] | Información que debe facilitarse únicamente para los VEH y los VEP |
| X |
HVAC/AirElectricHeater | P329 | boolean | [-] | Información que debe facilitarse únicamente para los VEH y los VEP |
| X |
HVAC/OtherHeating Technology | P330 | boolean | [-] | Información que debe facilitarse únicamente para los VEH y los VEP |
| X |
Cuadro 4
Parámetros de entrada “Vehicle/EngineTorqueLimits” por marcha (opcional)
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Camiones pesados | Camiones medios | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo o completado) |
Gear | P196 | integer | [-] | Solo es preciso indicar los números de marcha cuando son aplicables los límites del par motor relacionados con el vehículo de conformidad con el punto 6 | X | X | X |
|
MaxTorque | P197 | integer | [Nm] |
| X | X | X |
|
Cuadro 5
Parámetros de entrada para los vehículos exentos en virtud del artículo 9
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Camiones pesados | Camiones medios | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo y completado) |
Manufacturer | P235 | token | [-] |
| X | X | X | X |
ManufacturerAddress | P252 | token | [-] |
| X | X | X | X |
Model_CommercialName | P236 | token | [-] |
| X | X | X | X |
VIN | P238 | token | [-] |
| X | X | X | X |
Date | P239 | dateTime | [-] | Fecha y hora en que se crea la información de entrada y los datos de entrada | X | X | X | X |
LegislativeCategory | P251 | string | [-] | Valores permitidos: “N2”, “N3”, “M3” | X | X | X | X |
ChassisConfiguration | P036 | string | [-] | Valores permitidos: “Rigid Lorry”, “Tractor”, “Van”, “Bus” | X | X | X |
|
AxleConfiguration | P037 | string | [-] | Valores permitidos: “4 × 2”, “4 × 2F”, “6 × 2”, “6 × 4”, “8 × 2”, “8 × 4” donde “4 × 2F” se refiere a los vehículos 4 × 2 con eje delantero motor | X | X | X |
|
Articulated | P281 | boolean |
| Según la definición establecida en el anexo I del presente Reglamento. |
|
| X |
|
CorrectedActualMass | P038 | int | [kg] | De acuerdo con la “masa real del vehículo corregida”, tal como se especifica en la sección 2, punto 4 | X | X |
| X |
TechnicalPermissibleMaximumLadenMass | P041 | int | [kg] | De conformidad con el artículo 2, punto 7, del Reglamento (UE) n.o 1230/2012. | X | X | X | X |
ZeroEmissionVehicle | P269 | boolean | [-] | Como se define en el artículo 3, punto 15 | X | X | X |
|
Sleepercab | P276 | boolean | [-] |
| X |
|
|
|
ClassBus | P282 | string | [-] | Valores permitidos: “I”, “I + II”, “A”, “II”, “II+III”, “III”, “B”, de conformidad con el punto 2 del Reglamento n.o 107 de las Naciones Unidas |
|
|
| X |
NumberPassengersSeatsLowerDeck | P283 | int | [-] | Número de asientos de pasajeros, excluidos los asientos del conductor y de la tripulación. En el caso de un vehículo de dos pisos, este parámetro se utilizará para declarar los asientos de pasajeros del piso inferior. En el caso de un vehículo de un solo piso, este parámetro se utilizará para declarar el número total de asientos de pasajeros. |
|
|
| X |
NumberPassengersStandingLowerDeck | P354 | int | [-] | Número de pasajeros de pie registrados. En el caso de un vehículo de dos pisos, este parámetro se utilizará para declarar a los pasajeros de pie registrados en el piso inferior. En el caso de los vehículos de un solo piso, este parámetro se utilizará para declarar el número total de pasajeros de pie registrados. |
|
|
| X |
NumberPassengersSeatsUpperDeck | P284 | int | [-] | Número de asientos de pasajeros, excluidos los asientos del conductor y de la tripulación, del piso superior en un vehículo de dos pisos. En el caso de los vehículos de un solo piso se indicará “0”. |
|
|
| X |
NumberPassengersStandingUpperDeck | P355 | int | [-] | Número de pasajeros registrados de pie en el piso superior de un vehículo de dos pisos. En el caso de los vehículos de un solo piso se indicará “0”. |
|
|
| X |
BodyworkCode | P285 | int | [-] | Valores permitidos: “CA”, “CB”, “CC”, “CD”, “CE”, “CF”, “CG”, “CH”, “CI”, “CJ”, de conformidad con el punto 3 de la parte C del anexo I del Reglamento (UE) 2018/585 |
|
|
| X |
LowEntry | P286 | boolean | [-] | “low entry” de conformidad con el punto 1.2.2.3 del anexo I |
|
|
| X |
HeitIntegratedBody | P287 | int | [mm] | De conformidad con el punto 2, subpunto 5 |
|
|
| X |
SumNetPower | P331 | int | [W] | Suma máxima posible de potencia de propulsión positiva de todos los convertidores de energía que están conectados al tren de transmisión del vehículo o a las ruedas | X | X | X |
|
Technology | P332 | string | [-] | De conformidad con el cuadro 1 del apéndice 1. Valores permitidos: “Dual-fuel vehicle Article 9 exempted”, “In-motion charging Article 9 exempted”, “Multiple powertrains Article 9 exempted”, “FCV Article 9 exempted”, “H2 ICE Article 9 exempted”, “HEV Article 9 exempted”, “PEV Article 9 exempted”, “HV Article 9 exempted”. | X | X | X |
|
Cuadro 6
Parámetros de entrada “Advanced driver assistance systems”
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Camiones pesados | Camiones medios | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo y completado) |
EngineStopStart | P271 | boolean | [-] | De conformidad con el punto 8.1.1. Información que debe facilitarse únicamente para los vehículos ICE puros y los VEH. | X | X | X | X |
EcoRollWithoutEngineStop | P272 | boolean | [-] | De conformidad con el punto 8.1.2. Información que debe facilitarse únicamente para los vehículos ICE puros. | X | X | X | X |
EcoRollWithEngineStop | P273 | boolean | [-] | De conformidad con el punto 8.1.3. Información que debe facilitarse únicamente para los vehículos ICE puros. | X | X | X | X |
PredictiveCruiseControl | P274 | string | [-] | De conformidad con el punto 8.1.4, valores permitidos: '1,2', '1,2,3' | X | X | X | X |
APTEcoRollReleaseLockupClutch | P333 | boolean | [-] | Solo es pertinente en el caso de las transmisiones APT-S y APT-P en combinación con cualquier función Eco-roll. Se indicará “true” si la función 2) definida en el punto 8.1.2 es el modo Eco-roll predominante. Información que debe facilitarse únicamente para los vehículos ICE puros. | X | X | X | X |
Cuadro 7
Parámetros de entrada generales para VEH y VEP
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | Camiones pesados | Camiones medios | Autobuses pesados (vehículo primario) | Autobuses pesados (vehículo completo o completado) |
ArchitectureID | P400 | string | [-] | De conformidad con el punto 10.1.3, se admiten los siguientes valores: “E2”, “E3”, “E4”, “E-IEPC”, “P1”, “P2”, “P2.5”, “P3”, “P4”, “S2”, “S3”, “S4”, “S-IEPC” | X | X | X |
|
OvcHev | P401 | boolean | [-] | De conformidad con el punto 2, subpunto 31 | X | X | X |
|
MaxChargingPower | P402 | Integer | [W] | La potencia de carga máxima permitida por el vehículo para la carga exterior se declarará como entrada de la herramienta de simulación. Solo es pertinente si el parámetro “OvcHev” se ha fijado como “true”. | X | X | X |
|
Cuadro 8
Parámetros de entrada por posición de la máquina eléctrica
(Solo aplicable si el componente está presente en el vehículo)
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia | |||||||||
PowertrainPosition | P403 | string | [-] | Posición de la máquina eléctrica en el tren de potencia del vehículo con arreglo a los puntos 10.1.2 y 10.1.3. Valores permitidos: “1”, “2”, “2.5”, “3”, “4”, “GEN”. Solo se permite una posición de máquina eléctrica por tren de potencia, excepto en el caso de la arquitectura “S”. La arquitectura “S” requiere la posición de máquina eléctrica “GEN” y, además, otra posición de máquina eléctrica: “2”, “3” o “4”. La posición “1” no se permite para las arquitecturas “S” y “E”. La posición “GEN” solo está permitida para la arquitectura “S”. | |||||||||
Count | P404 | integer | [-] | Número de máquinas eléctricas idénticas en la posición de máquina eléctrica especificada. En el caso de que el parámetro “PowertrainPosition” valga “4”, el conteo serán múltiplos de 2 (por ejemplo, 2, 4, 6). | |||||||||
CertificationNumberEM | P405 | token | [-] |
| |||||||||
CertificationNumberADC | P406 | token | [-] | Dato opcional en caso de relación de transmisión única (ADC) adicional entre el árbol de la máquina eléctrica y el punto de conexión al tren de potencia del vehículo conforme al punto 10.1.2. No permitido cuando el parámetro “IHPCType” se ha fijado como “IHPC Type 1”. | |||||||||
P2.5GearRatios | P407 | double, 3 | [-] | Aplicable únicamente en caso de que el parámetro “PowertrainPosition” esté fijado en “P2.5” Declarado para cada marcha hacia delante de la transmisión. Valor declarado para la relación de transmisión definida como “nGBX_in / nEM” en el caso de que máquina eléctrica no disponga de ADC adicional o como “nGBX_in / nADC” en el caso de sí disponga de ella.
|
Cuadro 9
Limitaciones del par para cada posición de la máquina eléctrica (opcional)
Declaración de series de datos independientes para cada nivel de tensión medido en “CertificationNumberEM”. Esta declaración no se permite cuando el parámetro “IHPCType” esté fijado en “IHPC Type 1”.
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P408 | double, 2 | [1/min] | Exactamente las mismas entradas para la velocidad de giro que deben declararse en “CertificationNumberEM” para el número de parámetro “P468” del anexo X ter, apéndice 15. |
MaxTorque | P409 | double, 2 | [Nm] | Par máximo de la máquina eléctrica (con referencia al árbol de salida) como función de los puntos de velocidad de giro declarados con el número de parámetro “P469” del anexo X ter, apéndice 15. Cada valor del par máximo declarado deberá ser, o bien inferior a 0,9 veces el valor original a la velocidad de giro respectiva, o bien coincidir exactamente con el valor original a la velocidad de giro respectiva. Los valores del par máximo declarado no serán inferiores a cero. Cuando el parámetro “Count” (P404) sea mayor que uno, el par máximo se declarará para una única máquina eléctrica (tal como esté presente en el ensayo de componentes para la máquina eléctrica en “CertificationNumberEM”). |
MinTorque | P410 | double, 2 | [Nm] | Par mínimo de la máquina eléctrica (referido al árbol de salida) como función de los puntos de velocidad de giro declarados con el número de parámetro “P470” del anexo X ter, apéndice 15. Cada valor del par mínimo declarado deberá ser, o bien superior a 0,9 veces el valor original a la velocidad de giro respectiva, o bien coincidir exactamente con el valor original a la velocidad de giro respectiva. Los valores del par mínimo declarado no serán superiores a cero. Cuando el parámetro “Count” (P404) sea mayor que uno, el par mínimo se declarará para una única máquina eléctrica (tal como esté presente en el ensayo de componentes para la máquina eléctrica en “CertificationNumberEM”). |
Cuadro 10
Parámetros de entrada para cada SAEER
(solo aplicables si el componente está presente en el vehículo)
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
StringID | P411 | integer | [-] | La disposición de los subsistemas de baterías representativos de conformidad con el anexo X ter a nivel del vehículo se declarará asignando cada subsistema de baterías a una cadena específica definida por este parámetro. Todas las cadenas específicas están conectadas en paralelo, y todos los subsistemas de baterías situados en una cadena paralela específica están conectados en serie. Valores permitidos: “1”, “2”, “3”, … |
CertificationNumberREESS | P412 | token | [-] |
|
SOCmin | P413 | integer | [%] | Dato opcional. Solo pertinente en el caso de una “batería” de tipo SAEER. Parámetro solo eficaz en la herramienta de simulación si el valor de entrada es superior al valor genérico documentado en el manual del usuario. |
SOCmax | P414 | integer | [%] | Dato opcional. Solo pertinente en el caso de una “batería” de tipo SAEER. Parámetro solo eficaz en la herramienta de simulación si el valor de entrada es inferior al valor genérico documentado en el manual del usuario. |
Cuadro 11
Limitaciones por sobrealimentación de los VEH paralelos (opcional)
Solo se permiten si la configuración del tren de potencia de conformidad con el punto 10.1.1 es “P” o “IHPC Type 1”.
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
RotationalSpeed | P415 | double, 2 | [1/min] | En relación con la velocidad del árbol de entrada de la transmisión |
BoostingTorque | P416 | double, 2 | [Nm] | De conformidad con el punto 10.2 |
4. Masa del vehículo para camiones y tractocamiones rígidos medios, camiones y tractocamiones rígidos pesados
4.1 | La masa del vehículo utilizada como información de entrada de la herramienta de simulación deberá ser la masa real del vehículo corregida. |
4.2 | Si no se instala todo el equipamiento estándar, el fabricante deberá sumar a la masa real del vehículo corregida el peso de los siguientes elementos constructivos:
|
4.3 | La masa de los elementos constructivos mencionados en el punto 4.2 será la siguiente: En el caso de los vehículos de los grupos 1s, 1, 2 y 3, tal como se establecen en el anexo I, cuadro 1, y en el caso de los grupos de vehículos 51 y 53, tal como se establecen en el anexo I, cuadro 2.
En el caso de los vehículos de los grupos 4, 5, 9 a 12 y 16, tal como se establecen en el anexo I, cuadro 1.
|
5. Ejes de accionamiento hidráulico y mecánico
En el caso de vehículos equipados con:
a) | un eje de accionamiento hidráulico, este se considerará no accionable y el fabricante no lo tendrá en cuenta para establecer la configuración de ejes del vehículo; |
b) | un eje de accionamiento mecánico, este se considerará accionable y el fabricante lo tendrá en cuenta para establecer la configuración de ejes del vehículo. |
6. Límites de par del motor dependientes de la marcha y desactivación de la marcha
6.1. Límites de par del motor dependientes de la marcha
Con respecto al 50 % más alto de las marchas (es decir, las marchas 7 a 12 de una transmisión de doce marchas), el fabricante de vehículos podrá declarar un límite máximo del par motor dependiente de las marchas que no sea superior al 95 % del par motor máximo.
6.2 Desactivación de la marcha
Para las dos marchas más altas (por ejemplo, las marchas 5 y 6 para una transmisión de seis marchas), el fabricante del vehículo podrá declarar la desactivación completa de las marchas indicando 0 Nm como límite de par específico de la marcha en la entrada de la herramienta de simulación.
6.3 Requisitos de verificación
Los límites de par del motor dependientes de la marcha con arreglo al punto 6.1 y la desactivación de la marcha con arreglo al punto 6.2 estarán sujetos a verificación en el procedimiento de ensayo de verificación (VTP) establecido en el anexo X bis, punto 6.1.1.1, letra c).
7. Ralentí específico del vehículo
7.1. | El ralentí del motor debe declararse para cada vehículo concreto con un ICE. Este ralentí declarado del vehículo deberá ser igual o superior al especificado en la aprobación de los datos de entrada del motor. |
8. Sistemas avanzados de asistencia al conductor
8.1 | Los tipos de sistemas avanzados de asistencia al conductor que figuran a continuación, destinados principalmente a reducir el consumo de combustible y las emisiones de CO2, se declararán al introducir la información en la herramienta de simulación:
Los sistemas PCC pueden declararse al introducir la información en la herramienta de simulación si cuentan, bien con las funciones que figuran en los puntos 1 y 2, o bien con las que figuran en los puntos 1, 2 y 3. |
8.2 | Las once combinaciones de los sistemas avanzados de asistencia al conductor que figuran en el cuadro 12 son parámetros de entrada en la herramienta de simulación. Las combinaciones 2 a 11 no se declararán para las transmisiones SMT. Las combinaciones 3, 6, 9 y 11 no se declararán en el caso de las transmisiones APT. Cuadro 12 Combinaciones de los sistemas avanzados de asistencia al conductor como parámetros de entrada en la herramienta de simulación
|
8.3 | Todo sistema avanzado de asistencia al conductor declarado al introducir la información en la herramienta de simulación se configurará, por defecto, en el modo de ahorro de combustible después de cada ciclo de apagado/encendido. |
8.4 | Si al introducir la información en la herramienta de simulación se declara un sistema avanzado de asistencia al conductor, deberá ser posible verificar la presencia del sistema en cuestión basándose en la conducción en condiciones reales y en las definiciones del sistema que figuran en el punto 8.1. Si se declara una determinada combinación de sistemas, también deberá demostrarse la interacción de las funciones (por ejemplo, el control de crucero predictivo y el eco-roll con parada-arranque del motor). En el procedimiento de verificación se tendrá en cuenta que los sistemas necesitan determinadas condiciones límite para activarse (por ejemplo, el motor necesita una temperatura determinada para la función de parada-arranque, el PCC requiere unos intervalos de velocidad del vehículo determinados o para el eco-roll son necesarias unas relaciones determinadas entre pendiente de la carretera y masa del vehículo). El fabricante del vehículo deberá presentar una descripción funcional de las condiciones límite en las que los sistemas de desactivan o disminuye su eficacia. La autoridad de homologación podrá pedir al solicitante de la homologación justificaciones técnicas de estas condiciones límite y evaluar su conformidad. |
9. Volumen de carga
9.1. | En el caso de los vehículos con configuración de chasis tipo “furgoneta”, el volumen de carga se calculará mediante la ecuación siguiente:

cuyas dimensiones se determinarán de acuerdo con el cuadro 13 y la figura 3. Cuadro 13 Definiciones relativas al volumen de carga para camiones medios de tipo furgoneta
|
Figura 3
Definición del volumen de carga para camiones medios

10. VEH y VEP
Las siguientes disposiciones serán de aplicación únicamente en el caso de los VEH y los VEP.
10.1. Definición de la arquitectura del tren de potencia del vehículo
10.1.1. Definición de la configuración del tren de potencia
La configuración del tren de potencia del vehículo se determinará con arreglo a las siguientes definiciones:
En el caso de un VEH:
a) | “P” en el caso de un VEH paralelo |
b) | “S” en el caso de un VEH en serie |
c) | “S-IEPC” en el caso de que un componente IEPC esté presente en el vehículo |
d) | “IHPC Type 1” en caso de que el parámetro “IHPCType” del componente de la máquina eléctrica esté fijado en “IHPC Type 1” |
En el caso de un VEP:
a) | “E” en el caso de que un componente de máquina eléctrica esté presente en el vehículo |
b) | “E-IEPC” en el caso de que un componente IEPC esté presente en el vehículo |
10.1.2. Definición de las posiciones de las máquinas eléctricas en el tren de potencia del vehículo
Cuando la configuración del tren de potencia del vehículo de conformidad con el punto 10.1.1 sea “P”, “S” o “E”, la posición de la máquina eléctrica instalada en el tren de potencia del vehículo se determinará de conformidad con las definiciones que figuran en el cuadro 14.
Cuadro 14
Posiciones posibles de las máquinas eléctricas en el tren de potencia del vehículo
Índice de posición de máquina eléctrica | Configuración del tren de potencia con arreglo al punto 10.1.1 | Tipo de transmisión con arreglo al cuadro 1 del apéndice 12 del anexo VI | Definición/requisitos (2) | Otras explicaciones |
1 | P | AMT, APT-S, APT-P | Conectado al tren de potencia antes del embrague (en el caso de AMT) o antes del árbol de entrada del convertidor de par (en el caso de APT-S o APT-P). La máquina eléctrica se conecta al cigüeñal del ICE directamente o a través de un tipo de conexión mecánica (por ejemplo, una correa). | Distinción de P0: las máquinas eléctricas que, en principio, no pueden contribuir a la propulsión del vehículo (es decir, los alternadores) se tratan al introducir la información de entrada de los sistemas accesorios (véase el cuadro 3 del presente anexo para los camiones, el cuadro 3 bis del presente anexo para los autobuses y el anexo IX). No obstante, las máquinas eléctricas en esta posición que, en principio, puedan contribuir a la propulsión del vehículo, pero para las que el par máximo declarado de conformidad con el cuadro 9 del presente anexo esté fijado en cero, se declararán como “P1”. |
2 | P | AMT | La máquina eléctrica está conectada al tren de potencia después del embrague y antes del árbol de entrada de la transmisión. |
|
2 | E, S | AMT, APT-N, APT-S, APT-P | La máquina eléctrica está conectada al tren de potencia antes del árbol de entrada de la transmisión (en el caso de AMT o APT-N) o antes del árbol de entrada del convertidor de par (en el caso de APT-S, APT-P). |
|
2,5 | P | AMT, APT-S, APT-P | La máquina eléctrica está conectada al tren de potencia después del embrague (en el caso de AMT) o después del árbol de entrada del convertidor de par (en el caso de APT-S o APT-P) y antes del árbol de salida de la transmisión. | La máquina eléctrica está conectada a un árbol específico dentro de la transmisión (por ejemplo, el árbol de cambio de velocidades). Deberá facilitarse una relación de transmisión específica para cada marcha mecánica de la transmisión de acuerdo con el cuadro 8. |
3 | P | AMT, APT-S, APT-P | La máquina eléctrica está conectada al tren de potencia después del árbol de salida de la transmisión y antes del eje. |
|
3 | E, S | n. a. | La máquina eléctrica está conectada al tren de potencia antes del eje. |
|
4 | P | AMT, APT-S, APT-P | La máquina eléctrica está conectada al tren de potencia después del eje. |
|
4 | E, S | n. a. | La máquina eléctrica está conectada al buje de la rueda y se instala la misma disposición dos veces de forma simétrica (es decir, una en el lado izquierdo y otra en el lado derecho del vehículo en la misma posición de la rueda en dirección longitudinal). |
|
GEN | S | n. a. | La máquina eléctrica está conectada mecánicamente a un ICE, pero en ninguna circunstancia operativa está conectada mecánicamente a las ruedas del vehículo. |
|
10.1.3. Definición del identificador de la arquitectura del tren de potencia
El valor de entrada para el identificador de arquitectura del tren de potencia requerido de acuerdo con el cuadro 7 se determinará sobre la base de la configuración del tren de potencia de acuerdo con el punto 10.1.1 y la posición de la máquina eléctrica en el tren de potencia del vehículo de conformidad con el punto 10.1.2 (si procede) a partir de las combinaciones válidas de datos de entrada de la herramienta de simulación enumeradas en el cuadro 15.
En el caso de que la configuración del tren de potencia de conformidad con el punto 10.1.1 sea “IHPC Type 1”, serán de aplicación las disposiciones siguientes:
a) | El identificador de la arquitectura del tren de potencia “P2” se declarará de acuerdo con el cuadro 7 y los datos de los componentes del tren de potencia indicados en el cuadro 15 para “P2” serán la entrada en la herramienta de simulación con datos de componentes separados para la máquina eléctrica y la transmisión determinados de conformidad con el punto 4.4.3 del anexo X ter. |
b) | Los datos de los componentes para la máquina eléctrica de conformidad con la letra a) se facilitarán a la herramienta de simulación con el parámetro “PowertrainPosition” fijado en “2”, de conformidad con el cuadro 8. |
Cuadro 15
Entradas válidas de la arquitectura del tren de potencia en la herramienta de simulación
Tipo de tren de potencia | Configuración del tren de potencia | Identificador de la arquitectura para la entrada de VECTO | Componente del tren de potencia presente en el vehículo | Observaciones | |||||||
ICE | Posición GEN de la máquina eléctrica | Posición 1 de la máquina eléctrica | Posición 2 de la máquina eléctrica | Transmisión | Posición 3 de la máquina eléctrica | Eje | Posición 4 de la máquina eléctrica | ||||
VEP | E | E2 | no | no | no | sí | sí | no | sí | no |
|
E3 | no | no | no | no | no | sí | sí | no |
| ||
E4 | no | no | no | no | no | no | no | sí |
| ||
IEPC | E-IEPC | no | no | no | no | no | no | no |
| ||
VEH | P | P1 | sí | no | sí | no | sí | no | sí | no |
|
P2 | sí | no | no | sí | sí | no | sí | no | |||
P2.5 | sí | no | no | sí | sí | no | sí | no | |||
P3 | sí | no | no | no | sí | sí | sí | no | |||
P4 | sí | no | no | no | sí | no | sí | sí |
| ||
S | S2 | sí | sí | no | sí | sí | no | sí | no |
| |
S3 | sí | sí | no | no | no | sí | sí | no |
| ||
S4 | sí | sí | no | no | no | no | no | sí |
| ||
S-IEPC | sí | sí | no | no | no | no | no |
|
10.2. Definición de la limitación por sobrealimentación de los VEH paralelos
El fabricante del vehículo podrá declarar limitaciones del par total de propulsión de todo el tren de potencia en relación con el árbol de entrada de la transmisión para un VEH paralelo, a fin de restringir el potencial de sobrealimentación del vehículo.
La declaración de tales limitaciones solo estará permitida en caso de que la configuración del tren de potencia de conformidad con el punto 10.1.1 sea “P” o “IHPC Type 1”.
Las limitaciones se declaran permitiendo un par adicional a la curva del ICE a plena carga en función de la velocidad de giro del árbol de entrada de la transmisión. La interpolación lineal se realiza en la herramienta de simulación para determinar el par adicional aplicable entre los valores declarados a dos velocidades de giro específicas. En la gama de velocidades de giro que va desde 0 a la velocidad del motor a ralentí (de conformidad con el punto 7.1), el par a plena carga disponible desde el ICE equivale únicamente al par ICE a plena carga al ralentí del motor debido a la modelización del comportamiento del embrague durante el arranque del vehículo.
Cuando se declare tal limitación, los valores del par adicional se declararán como mínimo a una velocidad de giro de 0 y a la velocidad de giro máxima de la curva del ICE a plena carga. Cualquier número arbitrario de valores podrá declararse en el rango entre ambas velocidades. No se permitirán valores declarados inferiores a cero para el par adicional.
El fabricante del vehículo podrá declarar tales limitaciones que correspondan exactamente a la curva del ICE a plena carga declarando valores de 0 Nm para el par adicional.
10.3. Funcionalidad de parada y arranque del motor para VEH
Cuando el vehículo esté equipado con una funcionalidad de arranque y parada del motor de conformidad con el punto 8.1.1, teniendo en cuenta las condiciones límite del punto 8.4, el parámetro de entrada P271 de acuerdo con el cuadro 6 se fijará en “true”.
11. Transferencia de los resultados de la herramienta de simulación a otros vehículos
11.1. | Los resultados de la herramienta de simulación podrán transferirse a otros vehículos conforme a lo dispuesto en el artículo 9, apartado 6, siempre que se cumplan todas las condiciones siguientes:
|
11.2. | Para la transferencia de resultados se tendrán en cuenta los siguientes ficheros de resultados:
|
11.3. | Para llevar a cabo la transferencia de resultados, los ficheros mencionados en el punto 10.2 se modificarán sustituyendo los elementos de datos establecidos en los subpuntos por información actualizada. Solo se permiten modificaciones de los elementos de datos relacionados con la fase actual de acabado. 11.3.1 Archivo de registros del fabricante
11.3.2 archivo de información del cliente
11.3.3 Archivo de información del vehículo
11.3.4 Tras las modificaciones descritas anteriormente, se actualizarán los elementos distintivos que figuran a continuación.
|
11.4. | Cuando no puedan determinarse las emisiones de CO2 y el consumo de combustible para el vehículo original debido al mal funcionamiento de la herramienta de simulación, serán de aplicación las mismas medidas a los vehículos con resultados transferidos. |
11.5. | Si un fabricante aplica el enfoque de transferencia de resultados a otros vehículos establecido en el presente punto, el proceso correspondiente deberá demostrarse a la autoridad de homologación como parte del proceso de concesión de la licencia. |
«Apéndice 1
Tecnologías de vehículos a las que no se aplican las obligaciones establecidas en el artículo 9, apartado 1, párrafo primero, con arreglo a lo dispuesto en dicho párrafo
Cuadro 1
Categoría de la tecnología de los vehículos | Criterios de exención | Valor del parámetro de entrada de conformidad con el cuadro 5 del presente anexo | ||||||
Vehículo de pilas de combustible | Se trata de un vehículo de pilas de combustible o un vehículo híbrido de pilas de combustible con arreglo al punto 2, subpuntos 12 o 13, del presente anexo. | “FCV Article 9 exempted” | ||||||
ICE que funciona con hidrógeno | El vehículo está equipado con un ICE capaz de funcionar con hidrógeno. | “H2 ICE Article 9 exempted” | ||||||
Combustible dual | Vehículos de combustible dual de los tipos 1B, 2B y 3B según se definen en el artículo 2, puntos 53, 55 y 56 del Reglamento (UE) n.o 582/2011 | “Dual-fuel vehicle Article 9 exempted” | ||||||
VEH | Los vehículos quedarán exentos cuando sea de aplicación al menos uno de los siguientes criterios:
| “HEV Article 9 exempted” | ||||||
VEP | Los vehículos quedarán exentos cuando sea de aplicación al menos uno de los siguientes criterios:
| “PEV Article 9 exempted” | ||||||
Trenes de potencia múltiples permanentemente independientes mecánicamente | El vehículo está equipado con más de un tren de potencia en el que cada tren de potencia acciona diferentes ejes de ruedas del vehículo y en el que en ningún caso pueden conectarse mecánicamente distintos trenes de potencia. A este respecto, los ejes motores hidráulicos, de conformidad con el punto 5, letra a), del presente anexo, se tratarán como ejes no motores y, por tanto, no se contarán como un tren de potencia independiente. | “Multiple powertrains Article 9 exempted” | ||||||
Carga en movimiento | El vehículo está equipado con medios para la alimentación conductiva o inductiva de energía eléctrica al vehículo en movimiento, y esa energía se utiliza directamente, al menos en parte, para la propulsión del vehículo, y opcionalmente para cargar un SAEER. | “In-motion charging Article 9 exempted” | ||||||
Vehículos híbridos no eléctricos | El vehículo es un vehículo híbrido, pero no un VEH con arreglo al punto 2, subpuntos 26 y 27, del presente anexo. | “HV Article 9 exempted” |
(*) | Reglamento (UE) n.o 1230/2012 de la Comisión, de 12 de diciembre de 2012, por el que se desarrolla el Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo en lo que respecta a los requisitos de homologación de tipo relativos a las masas y dimensiones de los vehículos de motor y de sus remolques y por el que se modifica la Directiva 2007/46/CE del Parlamento Europeo y del Consejo (DO L 353 de 21.12.2012, p. 31). |
(**) | Reglamento (UE) 2019/2144 del Parlamento Europeo y del Consejo, de 27 de noviembre de 2019, relativo a los requisitos de homologación de tipo de los vehículos de motor y de sus remolques, así como los sistemas, componentes y unidades técnicas independientes destinados a esos vehículos, en lo que respecta a su seguridad general y a la protección de los ocupantes de los vehículos y de los usuarios vulnerables de la vía pública, por el que se modifica el Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo y se derogan los Reglamentos (CE) n.o 78/2009, (CE) n.o 79/2009 y (CE) n.o 661/2009 del Parlamento Europeo y del Consejo y los Reglamentos (CE) n.o 631/2009, (UE) n.o 406/2010, (UE) n.o 672/2010, (UE) n.o 1003/2010, (UE) n.o 1005/2010, (UE) n.o 1008/2010, (UE) n.o 1009/2010, (UE) n.o 19/2011, (UE) n.o 109/2011, (UE) n.o 458/2011, (UE) n.o 65/2012, (UE) n.o 130/2012, (UE) n.o 347/2012, (UE) n.o 351/2012, (UE) n.o 1230/2012 y (UE) 2015/166 de la Comisión (DO L 325 de 16.12.2019, p. 1). |
(1) En caso de que haya múltiples PTO instaladas para la transmisión, solo se declarará el componente con las pérdidas más elevadas de conformidad con el punto 3.6 del anexo IX, para su combinación de criterios “PTOShaftsGearWheels” y “PTOShaftsOtherElements”.
(2) El término “máquina eléctrica” utilizado aquí incluye un componente ADC adicional, si está presente.
(3) “sí” (es decir, el componente del eje está presente) solo en caso de que ambos parámetros “DifferentialIncluded” y “DesignTypeWheelMotor” estén fijados en “false”
(4) no aplicable a los tipos de transmisión APT-S y APT-P
(5) cuando la máquina eléctrica esté conectada a un árbol específico dentro de la transmisión (por ejemplo, el árbol de cambio de velocidades) de conformidad con la definición que figura en el cuadro 8.
(6) no aplicable a los vehículos de tracción delantera
MODELO DE LOS ARCHIVOS DE SALIDA DE LA HERRAMIENTA DE SIMULACIÓN
1. Introducción
El presente anexo describe los modelos del archivo de registros del fabricante (MRF), el archivo de información del cliente (CIF) y el archivo de información del vehículo (VIF).
2. Definiciones
|
1) |
“Autonomía real en la condición de consumo de carga”: el intervalo de conducción posible en modo de consumo de carga basado en la cantidad utilizable de energía del SAEER, sin carga provisional. |
|
2) |
“Autonomía solo eléctrica equivalente”: la parte de la autonomía real de consumo de carga que puede atribuirse al uso de energía eléctrica del SAEER, es decir, sin que el sistema no eléctrico de almacenamiento de la energía de propulsión proporcione energía alguna. |
|
3) |
“Intervalo de cero emisiones de CO2”: el intervalo que puede atribuirse a la energía proporcionada por el sistema de almacenamiento de la energía de propulsión que se considera que no tiene impacto de CO2. |
3. Modelo de los ficheros de salida
PARTE I
Emisiones de CO2 y consumo de combustible del vehículo. Archivo de registros del fabricante
El archivo de registros del fabricante se elaborará a través de la herramienta de simulación y deberá contener como mínimo la siguiente información, si procede para el vehículo o la fase de fabricación concretos:
|
1. |
Datos del vehículo, los componentes, las unidades técnicas independientes y los sistemas |
|
1.1. |
Datos del vehículo |
|
1.1.1. |
Nombre y dirección del fabricante o fabricantes… |
|
1.1.2. |
Modelo de vehículo / Denominación comercial… |
|
1.1.3. |
Número de identificación del vehículo (VIN)… |
|
1.1.4. |
Categoría del vehículo (N2, N3, M3)… |
|
1.1.5. |
Configuración de los ejes… |
|
1.1.6. |
Masa máxima en carga técnicamente admisible (t)… |
|
1.1.7. |
Grupo de vehículos según el anexo I… |
|
1.1.7 bis. |
Grupo o subgrupo del vehículo para las normas sobre CO2… |
|
1.1.8. |
Masa real corregida (kg)… |
|
1.1.9. |
Vehículo profesional (sí/no)… |
|
1.1.10. |
Vehículo pesado de cero emisiones (sí/no)… |
|
1.1.11. |
Vehículo pesado eléctrico híbrido (sí/no)… |
|
1.1.12. |
Vehículo de combustible dual (sí/no)… |
|
1.1.13. |
Cabina dormitorio (sí/no)… |
|
1.1.14. |
Arquitectura de VEH (por ejemplo, P1, P2)… |
|
1.1.15. |
Arquitectura de VEP (por ejemplo, E2, E3)… |
|
1.1.16. |
Capacidad de carga exterior (sí/no)… |
|
1.1.17. |
- |
|
1.1.18. |
Potencia máxima de carga exterior (kW)… |
|
1.1.19. |
Tecnología del vehículo exenta de conformidad con el artículo 9… |
|
1.1.20. |
Clase de autobús (por ejemplo, I, I + II, etc.)… |
|
1.1.21. |
Número de pasajeros en el piso superior… |
|
1.1.22. |
Número de pasajeros en el piso inferior… |
|
1.1.23. |
Código de la carrocería (por ejemplo, CA, CB)… |
|
1.1.24. |
Acceso bajo (sí/no)… |
|
1.1.25. |
Altura de la carrocería integrada (mm)… |
|
1.1.26. |
Longitud del vehículo (mm)… |
|
1.1.27. |
Anchura del vehículo (mm)… |
|
1.1.28. |
Tecnología de accionamiento de puertas (neumática, eléctrica, mixta)… |
|
1.1.29. |
Sistema de depósito en el caso del gas natural (comprimido, líquido)… |
|
1.1.30. |
Suma de la potencia neta (solo para los vehículos exentos de conformidad con el artículo 9) (kW)… |
|
1.2. |
Especificaciones principales del motor |
|
1.2.1. |
Modelo de motor… |
|
1.2.2. |
Número de certificación del motor… |
|
1.2.3. |
Potencia nominal del motor (kW)… |
|
1.2.4. |
Velocidad de ralentí del motor (1/min)… |
|
1.2.5. |
Velocidad nominal del motor (1/min)… |
|
1.2.6. |
Cilindrada (l)… |
|
1.2.7. |
Tipo de combustible (gasóleo CI/GNC PI/GNL PI, etc.)… |
|
1.2.8. |
Hash de los datos de entrada y de la información de entrada del motor… |
|
1.2.9. |
Sistema de recuperación del calor residual (sí/no)… |
|
1.2.10. |
Tipos de recuperación de calor residual (mecánica/eléctrica)… |
|
1.3. |
Especificaciones principales de la transmisión |
|
1.3.1. |
Modelo de transmisión… |
|
1.3.2. |
Número de certificación de la transmisión… |
|
1.3.3. |
Opción principal utilizada para generar los mapas de pérdida (Opción 1 / Opción 2 / Opción 3 / Valores normalizados)… |
|
1.3.4. |
Tipo de transmisión (SMT, AMT, APT-S, APT-P, APT-N)… |
|
1.3.5. |
Número de marchas… |
|
1.3.6. |
Relación de transmisión en la última marcha… |
|
1.3.7. |
Tipo de ralentizador… |
|
1.3.8. |
Toma de fuerza (sí/no)… |
|
1.3.9. |
Hash de los datos de entrada y de la información de entrada de la transmisión… |
|
1.4. |
Especificaciones del ralentizador |
|
1.4.1. |
Modelo de ralentizador… |
|
1.4.2. |
Número de certificación del ralentizador… |
|
1.4.3. |
Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición)… |
|
1.4.4. |
Hash de los datos de entrada y de la información de entrada de los otros componentes de transferencia de par… |
|
1.5. |
Especificación del convertidor de par |
|
1.5.1. |
Modelo de convertidor de par… |
|
1.5.2. |
Número de certificación del convertidor de par… |
|
1.5.3. |
Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición)… |
|
1.5.4. |
Hash de los datos de entrada y de la información de entrada del convertidor de par… |
|
1.6. |
Especificaciones del reenvío angular |
|
1.6.1. |
Modelo de reenvío angular… |
|
1.6.2. |
Número de certificación del reenvío angular… |
|
1.6.3. |
Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición)… |
|
1.6.4. |
Relación del reenvío angular… |
|
1.6.5. |
Hash de los datos de entrada y de la información de entrada de los componentes adicionales del tren de transmisión… |
|
1.7. |
Especificaciones del eje |
|
1.7.1. |
Modelo de eje… |
|
1.7.2. |
Número de certificación del eje… |
|
1.7.3. |
Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición)… |
|
1.7.4. |
Tipo de eje (p. ej., eje de reducción simple)… |
|
1.7.5. |
Desmultiplicación final… |
|
1.7.6. |
Hash de los datos de entrada y de la información de entrada de los ejes… |
|
1.8. |
Aerodinámica |
|
1.8.1. |
Modelo… |
|
1.8.2. |
Opción de certificación utilizada para generar el CdxA (valores normalizados / medición)… |
|
1.8.3. |
Número de certificación de CdxA (si es aplicable)… |
|
1.8.4. |
Valor CdxA… |
|
1.8.5. |
Hash de los datos de entrada y de la información de entrada de la resistencia aerodinámica… |
|
1.9. |
Especificaciones principales de los neumáticos |
|
1.9.1. |
Dimensiones de los neumáticos del eje 1… |
|
1.9.2. |
Número de certificación de los neumáticos, eje 1… |
|
1.9.3. |
CRR específico de todos los neumáticos del eje 1… |
|
1.9.3 bis. |
Hash de los datos de entrada y de la información de entrada de los neumáticos, eje 1… |
|
1.9.4. |
Dimensiones de los neumáticos del eje 2… |
|
1.9.5. |
Eje gemelo (sí/no) del eje 2… |
|
1.9.6. |
Número de certificación de los neumáticos, eje 2… |
|
1.9.7. |
CRR específico de todos los neumáticos del eje 2… |
|
1.9.7 bis. |
Hash de los datos de entrada y de la información de entrada de los neumáticos, eje 2… |
|
1.9.8. |
Dimensiones de los neumáticos del eje 3… |
|
1.9.9. |
Eje gemelo (sí/no) del eje 3… |
|
1.9.10. |
Número de certificación de los neumáticos, eje 3… |
|
1.9.11. |
CRR específico de todos los neumáticos del eje 3… |
|
1.9.11 bis. |
Hash de los datos de entrada y de la información de entrada de los neumáticos, eje 3… |
|
1.9.12. |
Dimensiones de los neumáticos del eje 4… |
|
1.9.13. |
Eje gemelo (sí/no) del eje 4… |
|
1.9.14. |
Número de certificación de los neumáticos, eje 4… |
|
1.9.15. |
CRR específico de todos los neumáticos del eje 4… |
|
1.9.16. |
Hash de los datos de entrada y de la información de entrada de los neumáticos, eje 4… |
|
1.10. |
Especificaciones de los accesorios |
|
1.10.1. |
Tecnología del ventilador de refrigeración del motor… |
|
1.10.2. |
Tecnología de la bomba de dirección… |
|
1.10.3. |
Sistema eléctrico |
|
1.10.3.1. |
Tecnología del alternador (convencional, inteligente, sin alternador)… |
|
1.10.3.2. |
Potencia máxima del alternador (alternador inteligente) (kW)… |
|
1.10.3.3. |
Capacidad de almacenamiento eléctrico (alternador inteligente) (kWh)… |
|
1.10.3.4. |
Luces de circulación diurna LED (sí/no)… |
|
1.10.3.5. |
Faros frontales LED (sí/no)… |
|
1.10.3.6. |
Luces de posición LED (sí/no)… |
|
1.10.3.7. |
Luces de freno LED (sí/no)… |
|
1.10.3.8. |
Luces interiores LED (sí/no)… |
|
1.10.4. |
Sistema neumático |
|
1.10.4.1. |
Tecnología… |
|
1.10.4.2. |
Relación de compresión… |
|
1.10.4.3. |
Sistema de compresión inteligente… |
|
1.10.4.4. |
Sistema de regeneración inteligente… |
|
1.10.4.5. |
Control de la suspensión neumática… |
|
1.10.4.6. |
Dosificación del reactivo (postratamiento del gas de escape)… |
|
1.10.5. |
Sistema de calefacción, ventilación y aire acondicionado (HVAC) |
|
1.10.5.1. |
Número de configuración del sistema… |
|
1.10.5.2. |
Tipo de bomba de calor para la refrigeración del compartimento del conductor… |
|
1.10.5.3. |
Tipo de bomba de calor para la calefacción del compartimento del conductor… |
|
1.10.5.4. |
Tipo de bomba de calor para la refrigeración del compartimento de pasajeros… |
|
1.10.5.5. |
Tipo de bomba de calor para la calefacción del compartimento de pasajeros… |
|
1.10.5.6. |
Potencia del calefactor accesorio (kW)… |
|
1.10.5.7. |
Doble acristalamiento (sí/no)… |
|
1.10.5.8. |
Termostato refrigerante regulable (sí/no)… |
|
1.10.5.9. |
Calefactor accesorio ajustable… |
|
1.10.5.10. |
Intercambiador de calor de gas residual del motor (sí/no)… |
|
1.10.5.11. |
Conductos de distribución de aire separados (sí/no)… |
|
1.10.5.12. |
Calefactor eléctrico de agua |
|
1.10.5.13. |
Calefactor eléctrico de aire |
|
1.10.5.14. |
Otras tecnologías de calefacción |
|
1.11. |
Limitaciones del par motor |
|
1.11.1. |
Límite del par motor en la marcha 1 (% del par motor máximo)… |
|
1.11.2. |
Límite del par motor en la marcha 2 (% del par motor máximo)… |
|
1.11.3. |
Límite del par motor en la marcha 3 (% del par motor máximo)… |
|
1.11.4. |
Límite del par motor en la marcha … (% del par motor máximo) |
|
1.12. |
Sistemas avanzados de asistencia al conductor (ADAS) |
|
1.12.1. |
Parada-arranque del motor durante las paradas del vehículo (sí/no)… |
|
1.12.2. |
Eco-roll sin parada-arranque del motor (sí/no)… |
|
1.12.3. |
Eco-roll con parada-arranque del motor (sí/no)… |
|
1.12.4. |
Control de crucero predictivo (sí/no)… |
|
1.13. |
Especificaciones de los sistemas de máquina eléctrica |
|
1.13.1 |
Modelo… |
|
1.13.2. |
Número de certificación |
|
1.13.3 |
Tipo (PSM, ESM, IM, SRM)… |
|
1.13.4. |
Posición (GEN 1, 2, 3, 4)… |
|
1.13.5. |
- |
|
1.13.6. |
Recuento en la posición… |
|
1.13.7. |
Potencia nominal (kW)… |
|
1.13.8. |
Potencia continua máxima (kW)… |
|
1.13.9. |
Opción de certificación para la generación del mapa de consumo de potencia eléctrica… |
|
1.13.10. |
Hash de los datos de entrada y de la información de entrada… |
|
1.13.11. |
Modelo del ADC… |
|
1.13.12. |
Número de certificación del ADC… |
|
1.13.13. |
Opción de certificación utilizada para generar un mapa de pérdida del ADC (valores normalizados/medición)… |
|
1.13.14. |
Relación del ADC… |
|
1.13.15. |
Hash de los datos de entrada y de la información de entrada de los componentes adicionales de la línea de transmisión… |
|
1.14. |
Especificaciones del sistema del tren de potencia eléctrico integrado (IEPC) |
|
1.14.1 |
Modelo… |
|
1.14.2. |
Número de certificación… |
|
1.14.3. |
Potencia nominal (kW)… |
|
1.14.4. |
Potencia continua máxima (kW)… |
|
1.14.5. |
Número de marchas… |
|
1.14.6. |
Relación de transmisión total más baja (la marcha más alta por la desmultiplicación final, si procede)… |
|
1.14.7. |
Diferencial incluido (sí/no)… |
|
1.14.8. |
Opción de certificación para la generación del mapa de consumo de potencia eléctrica… |
|
1.14.9. |
Hash de los datos de entrada y de la información de entrada… |
|
1.15. |
Especificaciones de los sistemas de almacenamiento de energía recargables |
|
1.15.1 |
Modelo… |
|
1.15.2. |
Número de certificación… |
|
1.15.3. |
Tensión nominal (V)… |
|
1.15.4. |
Capacidad total de almacenamiento (kWh)… |
|
1.15.5. |
Capacidad utilizable total en la simulación (kWh)… |
|
1.15.6. |
Opción de certificación para las pérdidas del sistema eléctrico… |
|
1.15.7. |
Hash de los datos de entrada y de la información de entrada… |
|
1.15.8. |
StringID (-)… |
|
2. |
Perfil de finalidad y valores dependientes de la carga |
|
2.1. |
Parámetros de simulación (por cada combinación de perfil de finalidad y carga; para los VEH-CCE, además, por consumo de carga, modo de mantenimiento de carga y ponderados) |
|
2.1.1. |
Perfil de finalidad… |
|
2.1.2. |
Carga (como se define en la herramienta de simulación) (kg)… |
|
2.1.2 bis. |
Cómputo de pasajeros… |
|
2.1.3. |
Masa total del vehículo en la simulación (kg)… |
|
2.1.4. |
Modo CCE (consumo de carga, mantenimiento de carga, ponderados)… |
|
2.2. |
Desarrollo de la conducción del vehículo e información relacionada para comprobar la calidad de la simulación |
|
2.2.1. |
Velocidad media (km/h)… |
|
2.2.2. |
Velocidad instantánea mínima (km/h)… |
|
2.2.3. |
Velocidad instantánea máxima (km/h)… |
|
2.2.4. |
Desaceleración máxima (m/s2)… |
|
2.2.5. |
Aceleración máxima (m/s2)… |
|
2.2.6. |
Porcentaje de carga plena en el tiempo de conducción… |
|
2.2.7. |
Número total de cambios de marcha… |
|
2.2.8. |
Distancia total recorrida (km)… |
|
2.3. |
Consumo de combustible y de energía (por tipo de combustible y energía eléctrica) y resultado de CO2 (total) |
|
2.3.1. |
Consumo de combustible (g/km)… |
|
2.3.2. |
Consumo de combustible (g/t-km)… |
|
2.3.3. |
Consumo de combustible (g/p-km)… |
|
2.3.4. |
Consumo de combustible (g/m3-km)… |
|
2.3.5. |
Consumo de combustible (l/100 km)… |
|
2.3.6. |
Consumo de combustible (l/t-km)… |
|
2.3.7. |
Consumo de combustible (l/p-km)… |
|
2.3.8. |
Consumo de combustible (l/m3-km)… |
|
2.3.9. |
Consumo de energía (MJ/km, kWh/km)… |
|
2.3.10. |
Consumo de energía (MJ/t-km, kWh/t-km)… |
|
2.3.11. |
Consumo de energía (MJ/p-km, kWh/p-km)… |
|
2.3.12. |
Consumo de energía (MJ/m3-km, kWh/m3-km)… |
|
2.3.13. |
CO2 (g/km)… |
|
2.3.14. |
CO2 (g/t-km)… |
|
2.3.15. |
CO2 (g/p-km)… |
|
2.3.16. |
CO2 (g/m3-km)… |
|
2.4. |
Rangos eléctricos y de emisión cero |
|
2.4.1. |
Autonomía real en la condición de consumo de carga (km)… |
|
2.4.2. |
Autonomía solo eléctrica equivalente (km)… |
|
2.4.3. |
Intervalo de cero emisiones de CO2 (km)… |
|
3. |
Información sobre el software |
|
3.1. |
Versión de la herramienta de simulación (X.X.X)… |
|
3. 2. |
Fecha y hora de la simulación… |
|
3.3. |
Hash criptográfico de la información de entrada y de los datos de entrada de la herramienta de simulación del vehículo primario (si procede)… |
|
3.4. |
Hash criptográfico del archivo de registros del fabricante del vehículo primario (si procede)… |
|
3.5. |
Hash criptográfico del archivo de información del vehículo producido por la herramienta de simulación (si procede)… |
|
3.6. |
Hash criptográfico de la información de entrada y los datos de entrada de la herramienta de simulación… |
|
3.7. |
Hash criptográfico del archivo de registros del fabricante… |
PARTE II
Emisiones de CO2 y consumo de combustible del vehículo. Archivo de información del cliente
El archivo de información del cliente se elaborará a través de la herramienta de simulación y deberá contener como mínimo la siguiente información, si procede para el vehículo o la fase de certificación concretos:
|
1. |
Datos del vehículo, los componentes, las unidades técnicas independientes y los sistemas |
|
1.1. |
Datos del vehículo |
|
1.1.1. |
Número de identificación del vehículo (VIN)… |
|
1.1.2. |
Categoría del vehículo (N2, N3, M3)… |
|
1.1.3. |
Configuración de los ejes… |
|
1.1.4. |
Masa máxima en carga técnicamente admisible (t)… |
|
1.1.5. |
Grupo de vehículos según el anexo I… |
|
1.1.5 bis. |
Grupo o subgrupo del vehículo para las normas sobre CO2… |
|
1.1.6. |
Nombre y dirección del fabricante o fabricantes… |
|
1.1.7. |
Modelo… |
|
1.1.8. |
Masa real corregida (kg)… |
|
1.1.9. |
Vehículo profesional (sí/no)… |
|
1.1.10. |
Vehículo pesado de cero emisiones (sí/no)… |
|
1.1.11 |
Vehículo pesado eléctrico híbrido (sí/no)… |
|
1.1.12 |
Vehículo de combustible dual (sí/no)… |
|
1.1.12 bis. |
Recuperación del calor residual (sí/no)… |
|
1.1.13. |
Cabina dormitorio (sí/no)… |
|
1.1.14. |
Arquitectura de VEH (por ejemplo, P1, P2)… |
|
1.1.15. |
Arquitectura de VEP (por ejemplo, E2, E3)… |
|
1.1.16. |
Capacidad de carga exterior (sí/no)… |
|
1.1.17. |
- |
|
1.1.18. |
Potencia máxima de carga exterior (kW)… |
|
1.1.19. |
Tecnología del vehículo exenta por el artículo 9… |
|
1.1.20. |
Clase de autobús (por ejemplo, I, I + II, etc.)… |
|
1.1.21. |
Número total de pasajeros registrados… |
|
1.2. |
Datos del componente, la unidad técnica independiente y los sistemas |
|
1.2.1. |
Potencia nominal del motor (kW)… |
|
1.2.2. |
Cilindrada (l)… |
|
1.2.3. |
Tipo de combustible (gasóleo CI/GNC PI/GNL PI, etc.)… |
|
1.2.4. |
Valores de transmisión (medidos/normalizados)… |
|
1.2.5. |
Tipo de transmisión (SMT, AMT, APT, ninguna)… |
|
1.2.6. |
Número de marchas… |
|
1.2.7. |
Ralentizador (sí/no)… |
|
1.2.8. |
Desmultiplicación final… |
|
1.2.9. |
Coeficiente de resistencia a la rodadura (CRR) medio de todos los neumáticos del vehículo de motor:… |
|
1.2.10 bis. |
Dimensión de los neumáticos de cada eje del vehículo de motor… |
|
1.2.10 ter. |
Clases de eficiencia en términos de consumo de carburante de los neumáticos de conformidad con el Reglamento (UE) 2020/740 para cada eje del vehículo de motor… |
|
1.2.10 quater. |
Número de certificación de los neumáticos de cada eje del vehículo de motor… |
|
1.2.11. |
Parada-arranque del motor durante las paradas del vehículo (sí/no)… |
|
1.2.12. |
Eco-roll sin parada-arranque del motor (sí/no)… |
|
1.2.13. |
Eco-roll con parada-arranque del motor (sí/no)… |
|
1.2.14. |
Control de crucero predictivo (sí/no)… |
|
1.2.15 |
Potencia total nominal de propulsión (kW) de los sistemas de máquina eléctrica… |
|
1.2.16 |
Potencia total máxima continua de propulsión de los sistemas de máquina eléctrica (kW)… |
|
1.2.17 |
Capacidad total de almacenamiento del SAEER (kWh)… |
|
1.2.18 |
Capacidad utilizable de almacenamiento del SAEER en la simulación (kWh)… |
|
1.3. |
Configuración de los accesorios |
|
1.3.1. |
Tecnología de la bomba de dirección… |
|
1.3.2. |
Sistema eléctrico |
|
1.3.2.1 |
Tecnología del alternador (convencional, inteligente, sin alternador)… |
|
1.3.2.2 |
Potencia máxima del alternador (alternador inteligente) (kW)… |
|
1.3.2.3 |
Capacidad de almacenamiento eléctrico (alternador inteligente) (kWh)… |
|
1.3.3. |
Sistema neumático |
|
1.3.3.1 |
Sistema de compresión inteligente… |
|
1.3.3.2 |
Sistema de regeneración inteligente… |
|
1.3.4. |
Sistema de calefacción, ventilación y aire acondicionado (HVAC) |
|
1.3.4.1 |
Configuración del sistema… |
|
1.3.4.2 |
Potencia del calefactor accesorio (kW)… |
|
1.3.4.3 |
Doble acristalamiento (sí/no)… |
|
2. |
Emisiones de CO2 y consumo de combustible del vehículo (por cada combinación de perfil de finalidad y carga; para los VEH-CCE, además, por consumo de carga, modo de mantenimiento de carga y ponderados) |
|
2.1. |
Parámetros de simulación |
|
2.1.1 |
Perfil de finalidad… |
|
2.1.2 |
Carga útil (kg)… |
|
2.1.3 |
Información sobre los pasajeros |
|
2.1.3.1 |
Número de pasajeros en la simulación …(-) |
|
2.1.3.2 |
Masa de los pasajeros en la simulación …(kg) |
|
2.1.4 |
Masa total del vehículo en la simulación (kg)… |
|
2.1.5. |
Modo CCE (consumo de carga, mantenimiento de carga, ponderados)… |
|
2.2. |
Velocidad media (km/h)… |
|
2.3. |
Resultados en consumo de combustible y de energía (por tipo de combustible y energía eléctrica) |
|
2.3.1. |
Consumo de combustible (g/km)… |
|
2.3.2. |
Consumo de combustible (g/t-km)… |
|
2.3.3. |
Consumo de combustible (g/p-km)… |
|
2.3.4. |
Consumo de combustible (g/m3-km)… |
|
2.3.5. |
Consumo de combustible (l/100 km)… |
|
2.3.6. |
Consumo de combustible (l/t-km)… |
|
2.3.7. |
Consumo de combustible (l/p-km)… |
|
2.3.8. |
Consumo de combustible (l/m3-km)… |
|
2.3.9. |
Consumo de energía (MJ/km, kWh/km)… |
|
2.3.10. |
Consumo de energía (MJ/t-km, kWh/t-km)… |
|
2.3.11. |
Consumo de energía (MJ/p-km, kWh/p-km)… |
|
2.3.12. |
Consumo de energía (MJ/m3-km, kWh/m3-km)… |
|
2.4. |
Resultados de CO2 (para cada combinación de perfil de finalidad y carga) |
|
2.4.1. |
CO2 (g/km)… |
|
2.4.2. |
CO2 (g/t-km)… |
|
2.4.3. |
CO2 (g/p-km)… |
|
2.4.5. |
CO2 (g/m3-km)… |
|
2.5. |
Niveles de autonomía eléctrica |
|
2.5.1. |
Autonomía real en la condición de consumo de carga (km)… |
|
2.5.2. |
Autonomía solo eléctrica equivalente (km)… |
|
2.5.3. |
Intervalo de cero emisiones de CO2 (km)… |
|
2.6. |
Resultados ponderados |
|
2.6.1. |
Emisiones de CO2 específicas (gCO2/t-km)… |
|
2.6.2. |
Consumo específico de energía eléctrica (kWh/t-km)… |
|
2.6.3. |
Valor medio de carga útil (t)… |
|
2.6.4. |
Emisiones de CO2 específicas (gCO2/p-km)… |
|
2.6.5. |
Consumo específico de energía eléctrica (kWh/p-km)… |
|
2.6.6. |
Promedio del cómputo de pasajeros (p)… |
|
2.6.7. |
Autonomía real en la condición de consumo de carga (km)… |
|
2.6.8. |
Autonomía solo eléctrica equivalente (km)… |
|
2.6.9. |
Intervalo de cero emisiones de CO2 (km)… |
|
3. |
Información sobre el software |
|
3.1. |
Versión de la herramienta de simulación… |
|
3.2. |
Fecha y hora de la simulación… |
|
3.3. |
Hash criptográfico de la información de entrada y de los datos de entrada de la herramienta de simulación del vehículo primario (si procede)… |
|
3.4. |
Hash criptográfico del archivo de registros del fabricante del vehículo primario (si procede)… |
|
3.5. |
Hash criptográfico de la información de entrada y los datos de entrada del vehículo en la herramienta de simulación… |
|
3.6. |
Hash criptográfico del archivo de registros del fabricante… |
|
3.7. |
Hash criptográfico del archivo de información del cliente… |
PARTE III
Emisiones de CO2 y consumo de combustible del vehículo. Archivo de información del vehículo para autobuses pesados
El archivo de información del vehículo se elaborará en el caso de autobuses pesados para transferir los datos de entrada, la información de entrada y los resultados de la simulación pertinentes a las fases de certificación posteriores siguiendo el método descrito en el punto 2 del anexo I.
El archivo de información del vehículo contendrá, como mínimo, el siguiente contenido:
|
1. |
En el caso de un vehículo primario: |
|
1.1. |
Los datos de entrada y la información de entrada establecidos en el anexo III para el vehículo primario, excepto: el mapa del combustible del motor; los factores de corrección del motor WHTC_Urban, WHTC_ Rural, WHTC_Motorway, BFColdHot, CFRegPer; las características del convertidor de par; los mapas de pérdidas para la transmisión, el ralentizador, el reenvío angular y el eje; los mapas de consumo de potencia eléctrica para los sistemas de motores eléctricos e IEPC; los parámetros de pérdida eléctrica para el SAEER |
|
1.2. |
Para cada condición de perfil de finalidad y carga: |
|
1.2.1. |
Masa total del vehículo en la simulación (kg)… |
|
1.2.2. |
Número de pasajeros en la simulación… |
|
1.2.3. |
Consumo de combustible (MJ/km)… |
|
1.3. |
Información sobre el software |
|
1.3.1. |
Versión de la herramienta de simulación… |
|
1.3.2. |
Fecha y hora de la simulación… |
|
1.4. |
Hashes criptográficos |
|
1.4.1. |
Hash criptográfico del archivo de registros de los fabricantes del vehículo primario (si procede)… |
|
1.4.2. |
Hash criptográfico del archivo de información del vehículo… |
|
2. |
Para cada vehículo provisional, completo o completado |
|
2.1. |
Datos de entrada e información de entrada establecidos para el vehículo completo o completado en el anexo III y facilitados por el fabricante de que se trate |
|
2.2. |
Información sobre el software |
|
2.2.1. |
Versión de la herramienta de simulación… |
|
2.2.2. |
Fecha y hora de la simulación… |
|
2.3. |
Hashes criptográficos |
|
2.3.1. |
Hash criptográfico del archivo de información del vehículo …». |
|
1) |
en el punto 2 se sustituyen el título y el primer párrafo por el texto siguiente: «2. Definiciones A los efectos del presente anexo serán de aplicación las definiciones del Reglamento n.o 49 de las Naciones Unidas (*1), además de las siguientes: (*1) Reglamento n.o 49 de la Comisión Económica de las Naciones Unidas para Europa (CEPE): Disposiciones uniformes relativas a las medidas que deben adoptarse contra las emisiones de gases y partículas contaminantes procedentes de motores de encendido por compresión y motores de encendido por chispa destinados a la propulsión de vehículos (DO L 171 de 24.6.2013, p. 1).»;" |
|
2) |
en el punto 2, primer párrafo, se añaden los puntos siguientes:
|
|
3) |
en el punto 2, el segundo párrafo se sustituye por el texto siguiente: «No serán de aplicación las definiciones de los puntos 3.1.5 y 3.1.6 del anexo 4 del Reglamento n.o 49 de las Naciones Unidas.»; |
|
4) |
en el punto 3, la primera frase se sustituye por el texto siguiente: «Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma IATF 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025.»; |
|
5) |
en el punto 3.1.1, primer párrafo, los puntos 1, 2 y 3 se sustituyen por el texto siguiente:
|
|
6) |
el punto 3.1.2 se sustituye por el texto siguiente:
|
|
7) |
en el punto 3.1.3, la segunda frase se sustituye por el texto siguiente: «Si el cárter es de tipo abierto, las emisiones se medirán y se sumarán a las emisiones del tubo de escape, con arreglo a las disposiciones del punto 6.10 del anexo 4 del Reglamento n.o 49 de las Naciones Unidas.»; |
|
8) |
en el punto 3.1.4., el párrafo segundo se sustituye por el texto siguiente: «Conviene que la refrigeración del aire de admisión de laboratorio para los ensayos realizados conforme al presente Reglamento cumpla las disposiciones del punto 6.2 del anexo 4 del Reglamento n.o 49 de las Naciones Unidas.»; |
|
9) |
en el punto 3.1.5, subpunto 6, la primera frase se sustituye por el texto siguiente:
|
|
10) |
se inserta el punto siguiente:
|
|
11) |
en el punto 3.2, cuadro 1, última fila, el texto de la primera columna «Gas natural/PI» se sustituye por el texto siguiente: «Gas natural/PI o gas natural/CI»; |
|
12) |
se inserta el punto siguiente:
|
|
13) |
en el punto 3.3, la primera frase se sustituye por el texto siguiente: «El aceite lubricante empleado en todas las rondas de ensayo realizadas conforme al presente anexo deberá ser un aceite comercialmente disponible, aprobado sin restricciones por el fabricante para las condiciones en servicio normales definidas en el punto 4.2 del anexo 8 del Reglamento n.o 49 de las Naciones Unidas.»; |
|
14) |
se inserta el punto siguiente:
|
|
15) |
en el punto 3.5, las frases primera y segunda se sustituyen por el texto siguiente: «El equipo de medición deberá cumplir los requisitos del punto 9 del anexo 4 del Reglamento n.o 49 de las Naciones Unidas. No obstante los requisitos del punto 9 del anexo 4 del Reglamento n.o 49 de las Naciones Unidas, los sistemas de medición enumerados en el cuadro 2 deberán respetar los límites indicados en dicho cuadro.»: |
|
16) |
en el punto 3.5, se añaden las siguientes filas al cuadro 2:
|
|
17) |
en el punto 3.5, los párrafos primero y segundo que siguen al cuadro 2 se sustituyen por el texto siguiente: «En el caso de los motores de combustible dual, el valor “calibración máxima” aplicable al sistema de medición del flujo másico de combustible, tanto para los combustibles líquidos como para los gaseosos, se definirá de conformidad con las disposiciones siguientes:
|
|
18) |
en los puntos 3.5.1 y 4, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
19) |
se inserta el punto siguiente:
|
|
20) |
en los puntos 4.3.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
21) |
en los puntos 4.3.2, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas», en tres casos; |
|
22) |
se inserta el punto siguiente:
|
|
23) |
el punto 4.3.3 se sustituye por el texto siguiente:
|
|
24) |
en el punto 4.3.3.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
25) |
se inserta el punto siguiente:
|
|
26) |
el punto 4.3.4 se sustituye por el texto siguiente:
|
|
27) |
en el punto 4.3.4.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
28) |
se inserta el punto siguiente:
|
|
29) |
en el punto 4.3.5.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
30) |
en los puntos 4.3.5.1.1 y 4.3.5.2.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas», en cuatro casos; |
|
31) |
en el punto 4.3.5.2.2, segundo párrafo, la primera frase se sustituye por el texto siguiente: «Todos los puntos de consigna deseados de par en un determinado punto de consigna deseado de velocidad del motor que superan el valor límite definido por el valor del par a plena carga (determinados a partir de la curva del motor a plena carga registrada de conformidad con el punto 4.3.1) en ese punto de consigna deseado de velocidad del motor en particular, menos el 5 % de Tmax_overall, se sustituirán por un único punto de consigna deseado de par a plena carga en ese punto de consigna deseado de velocidad del motor en particular.»; |
|
32) |
en el punto 4.3.5.3, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas», en tres casos; |
|
33) |
en el punto 4.3.5.3, subpunto 4, la segunda frase se sustituye por el texto siguiente: «durante la ronda de ensayo del FCMC no será necesario monitorizar las emisiones de partículas contaminantes, metano y amoniaco.»; |
|
34) |
se inserta el punto siguiente:
|
|
35) |
en el punto 4.3.5.4, tanto en el primero como en el segundo párrafo, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
36) |
en el punto 4.3.5.4, el párrafo tercero se sustituye por el texto siguiente: «La curva del motor a plena carga del motor de origen en función del CO2 de la familia de motores en función del CO2 registrada conforme al punto 4.3.1 se utilizará para la desnormalización de los valores de referencia del modo 9 realizada conforme a los puntos 7.4.6, 7.4.7 y 7.4.8 del anexo 4 del Reglamento n.o 49 de las Naciones Unidas.»; |
|
37) |
en el punto 4.3.5.5, párrafo cuarto, subpunto 1, la segunda frase se sustituye por el texto siguiente: «Durante el siguiente período de 30 ± 1 segundos el motor se controlará como sigue:»; |
|
38) |
en el punto 4.3.5.5, párrafo cuarto, el subpunto 3 se sustituye por el texto siguiente:
|
|
39) |
en el punto 4.3.5.6, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
40) |
en el punto 4.3.5.6.2, segundo párrafo, los subpuntos 2 y 3 se sustituyen por el texto siguiente:
|
|
41) |
en el punto 4.3.5.6.3, el párrafo segundo se sustituye por el texto siguiente: «Las emisiones másicas específicas de la velocidad y los puntos del par motor concretos medidos durante el FCMC se determinarán como valor promediado durante el período de medición de 30 ± 1 segundos definido conforme al punto 4.3.5.5, subpunto 1.»; |
|
42) |
en los puntos 4.3.5.6.3 y 4.3.5.7.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas», en cinco casos; |
|
43) |
el punto 4.3.5.7.2 se sustituye por el texto siguiente:
|
|
44) |
en el punto 5.1, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
45) |
se inserta el punto siguiente:
|
|
46) |
se inserta el punto siguiente:
|
|
47) |
el punto 5.3.3 se sustituye por el texto siguiente:
|
|
48) |
en el punto 5.3.3.1, cuadro 4, primera columna, el texto de la última fila «Gas natural/PI» se sustituye por el texto siguiente: «Gas natural/PI o gas natural/CI»; |
|
49) |
se inserta el punto siguiente:
|
|
50) |
en el punto 5.4, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas», en seis casos; |
|
51) |
se insertan los puntos siguientes:
|
|
52) |
el punto 6.1.4 se sustituye por el texto siguiente:
|
|
53) |
se insertan los puntos siguientes:
|
|
54) |
se inserta el punto siguiente:
|
|
55) |
se inserta el punto siguiente:
|
|
56) |
se inserta el punto siguiente:
|
|
57) |
se inserta el punto siguiente:
|
|
58) |
se inserta el punto siguiente:
|
|
59) |
el punto 6.1.17 se sustituye por el texto siguiente:
|
|
60) |
se añaden los puntos siguientes:
|
|
61) |
en el apéndice 2, parte 1, se insertan los puntos siguientes:
|
|
62) |
en el apéndice 2, parte 1, se inserta el punto siguiente:
|
|
63) |
En el apéndice 2, parte 1, el punto 3.2.1.11 se sustituye por el texto siguiente:
|
|
64) |
en el apéndice 2, parte 1, el punto 3.2.2.2.1 se sustituye por el texto siguiente:
|
|
65) |
en el apéndice 2, parte 1, el punto 3.2.4.2 se sustituye por el texto siguiente:
|
|
66) |
en el apéndice 2, parte 1, el punto 3.2.12.1.1 se sustituye por el texto siguiente:
|
|
67) |
en el apéndice 2, parte 1, el punto 3.2.12.2.7 se sustituye por el texto siguiente:
|
|
68) |
en el apéndice 2, parte 1, se suprimen los puntos 3.2.12.2.7.0.1 a 3.2.12.2.8.7; |
|
69) |
en el apéndice 2, parte 1, el punto 3.2.17 se sustituye por el texto siguiente:
|
|
70) |
en el apéndice 2, parte 1, el punto 3.5.5 se sustituye por el texto siguiente:
|
|
71) |
en el apéndice 2, parte 1, puntos 3.5.5.1 a 3.5.5.8, segunda columna, al final del texto, se inserta una nota de cuadro «(9)»; |
|
72) |
en el apéndice 2, parte 1, se inserta el punto siguiente:
|
|
73) |
en el apéndice 2, parte 1, se añaden los puntos siguientes:
|
|
74) |
en el apéndice 2, parte 1, se añaden las notas de cuadro siguientes:
|
|
75) |
en el apéndice 2, apéndice de la ficha de características, el punto 4 se sustituye por el texto siguiente:
(*2) En el caso de los motores de combustible dual, indíquense los valores para cada tipo de combustible y para cada modo de funcionamiento por separado»;" |
|
76) |
en el apéndice 2, apéndice de la ficha de características, cuadro 1, en ambas filas, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
77) |
en el apéndice 2, apéndice de la ficha de características, punto 6.1, la primera frase se sustituye por el texto siguiente: «Velocidades de ensayo del motor para el ensayo de emisiones (para motores de combustible dual en modo de combustible dual) de conformidad con el anexo 4 del Reglamento n.o 49 de las Naciones Unidas (1)»; |
|
78) |
en el apéndice 2, apéndice de la ficha de características, el punto 6.2 se sustituye por el texto siguiente:
(*3) Reglamento n.o 85 de la Comisión Económica para Europa (CEPE) de las Naciones Unidas — Disposiciones uniformes sobre la homologación de motores de combustión interna o grupos motopropulsores eléctricos destinados a la propulsión de vehículos de motor de las categorías M y N por lo que respecta a la medición de la potencia neta y de la potencia máxima durante treinta minutos de los grupos motopropulsores eléctricos (DO L 323 de 7.11.2014, p. 52).»;" |
|
79) |
en el apéndice 3, el punto 1 se sustituye por el texto siguiente:
|
|
80) |
en el apéndice 3, el punto 1.5 se sustituye por el texto siguiente:
|
|
81) |
en el apéndice 3, se insertan los siguientes puntos:
|
|
82) |
En el apéndice 3, el punto 1.7.3 se sustituye por el texto siguiente:
|
|
83) |
en el apéndice 3, punto 1.8.2, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
84) |
en el apéndice 3, se insertan los siguientes puntos:
|
|
85) |
en el apéndice 4, punto 5.3, la letra b. se sustituye por el texto siguiente:
|
|
86) |
en el apéndice 4, los puntos 5.4, 5.5 y 5.6 se sustituyen por el texto siguiente:
|
|
87) |
en el apéndice 4, punto 5.7, el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas», en dos casos; |
|
88) |
en el apéndice 4, se inserta el punto siguiente:
|
|
89) |
en el apéndice 4, el punto 7.3 se sustituye por el texto siguiente:
|
|
90) |
en el apéndice 4, se inserta el punto siguiente:
|
|
91) |
en el apéndice 4, se insertan los siguientes puntos:
|
|
92) |
en el apéndice 4, punto 8, el segundo párrafo se sustituye por el texto siguiente: «Con respecto a los motores de gasolina y de combustible dual, los valores límite para la evaluación de la conformidad de un solo motor ensayado serán el valor deseado determinado conforme al punto 6, más el 5 %.»; |
|
93) |
en el apéndice 4, el punto 9.1 se sustituye por el texto siguiente:
|
|
94) |
en el apéndice 4, punto 9.3, letras a. y b., el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
95) |
en el apéndice 5, punto 1, primer párrafo, inciso ii), el texto «Reglamento n.o 49 Rev. 06 de la CEPE» se sustituye por el texto siguiente: «Reglamento n.o 49 de las Naciones Unidas»; |
|
96) |
en el apéndice 6, los puntos 1.4 y 1.4.1 se sustituyen por el texto siguiente:
|
|
97) |
en el apéndice 6, el punto 1.5.1 se sustituye por el texto siguiente:
|
|
98) |
en el apéndice 6, el punto 2.1 se sustituye por el texto siguiente:
|
|
99) |
en el apéndice 7, en el punto 3, el cuadro 1 se sustituye por el cuadro siguiente: «Cuadro 1 Parámetros de entrada “Engine/General”
|
|
100) |
en el apéndice 7, parte 3, se inserta el cuadro siguiente: «Cuadro 1 bis Parámetros de entrada “Engine” por tipo de combustible
|
|
101) |
en el apéndice 7, en el punto 3, el cuadro 3 se sustituye por el cuadro siguiente: «Cuadro 3 Parámetros de entrada “Engine/FuelMap” para cada punto de la cuadrícula del mapa de combustible (Se requiere un mapa por tipo de combustible)
|
|
102) |
en el apéndice 8, parte 3.3, se inserta la frase siguiente: «Los valores de FC extrapolados inferiores al valor medido a plena carga a la velocidad respectiva del motor se ajustarán al valor medido a plena carga.»; |
|
103) |
en el apéndice 8, se inserta el punto siguiente:
|
|
104) |
en el apéndice 8, se insertan los siguientes puntos:
|
(*1) Reglamento n.o 49 de la Comisión Económica de las Naciones Unidas para Europa (CEPE): Disposiciones uniformes relativas a las medidas que deben adoptarse contra las emisiones de gases y partículas contaminantes procedentes de motores de encendido por compresión y motores de encendido por chispa destinados a la propulsión de vehículos (DO L 171 de 24.6.2013, p. 1).»;
(*2) En el caso de los motores de combustible dual, indíquense los valores para cada tipo de combustible y para cada modo de funcionamiento por separado»;
(*3) Reglamento n.o 85 de la Comisión Económica para Europa (CEPE) de las Naciones Unidas — Disposiciones uniformes sobre la homologación de motores de combustión interna o grupos motopropulsores eléctricos destinados a la propulsión de vehículos de motor de las categorías M y N por lo que respecta a la medición de la potencia neta y de la potencia máxima durante treinta minutos de los grupos motopropulsores eléctricos (DO L 323 de 7.11.2014, p. 52).»;»
|
1) |
en el punto 2, subpunto 16, se añade la frase siguiente: «En algunos casos, el resbalamiento permanente en las marchas fijas está destinado, por ejemplo, a evitar vibraciones.»; |
|
2) |
en el punto 2, subpunto 17, la primera frase se sustituye por el texto siguiente: «“Embrague de arranque”: embrague que adapta la velocidad entre el motor y las ruedas motrices cuando el vehículo arranca.»; |
|
3) |
en el punto 2, subpunto 20, se añade la frase siguiente: «En algunos casos, el resbalamiento permanente en las marchas fijas está destinado, por ejemplo, a evitar vibraciones.»; |
|
4) |
en el punto 2, loa subpuntos 22 y 23 se sustituyen por el texto siguiente:
|
|
5) |
en el punto 2, se añaden los siguientes subpuntos:
|
|
6) |
en el punto 3.1, en el párrafo primero, la fórmula se sustituye por lo siguiente: «Tl,in(nin,Tin,gear) = Tl,in,min_loss + fT × Tin + floss_corr × Tin + Tl,in,min_el + fel_corr × Tin + flosstcc × Tin»; |
|
7) |
en el punto 3.1, párrafo cuarto, se inserta el texto siguiente después de la fórmula: «El factor de corrección de las pérdidas en un embrague resbalante TC de bloqueo tal como se define en el punto 2, subpunto 16, o embrague lateral de entrada resbalante definido en el punto 2, subpunto 20, se calculará como sigue: 
|
|
8) |
en el punto 3.1, se añaden las siguientes notas explicativas:
|
|
9) |
en el punto 3.1.2.2, la segunda frase se sustituye por el texto siguiente: «Las mediciones se realizarán en los mismos puntos de velocidad y con las mismas temperaturas del cojinete de la instalación de ensayo ± 3 K que se utilicen en los ensayos.»; |
|
10) |
el punto 3.1.2.4.2 se sustituye por el texto siguiente:
|
|
11) |
en el punto 3.1.2.4.4, segunda frase, el número «60» se sustituye por «100»; |
|
12) |
en el punto 3.1.2.5.5, párrafo tercero, el subpunto 2 se sustituye por el texto siguiente:
|
|
13) |
el punto 3.1.3.1 se sustituye por el texto siguiente:
|
|
14) |
en el punto 3.1.3.5, segunda frase, la referencia al «anexo VII» se sustituye por «anexo IX»; |
|
15) |
en el punto 3.1.4, primera frase, «ISO/TF» se sustituye por «IATF»; |
|
16) |
el punto 3.1.6.2 se sustituye por el texto siguiente:
|
|
17) |
en el punto 3.1.6.3.3, la primera frase se sustituye por el texto siguiente: «En cada punto de velocidad debe dejarse transcurrir un tiempo de estabilización mínimo de 5 segundos dentro de los límites de temperatura indicados en el punto 3.1.2.5.»; |
|
18) |
el punto 3.1.6.3.4 se sustituye por el texto siguiente:
|
|
19) |
el punto 3.1.7.1 se sustituye por el texto siguiente:
|
|
20) |
en el punto 3.1.7.3, primera frase, la primera fórmula se sustituye por lo siguiente: «Tloss = T1,in(nin, Tin,gear)»; |
|
21) |
en el punto 3.1.8, figura 1, el título se sustituye por el texto siguiente: «Ejemplo de configuración de ensayo A para la opción 1»; |
|
22) |
en el punto 3.1.8, figura 2, el título se sustituye por el texto siguiente: «Ejemplo de configuración de ensayo B para la opción 1»; |
|
23) |
en el punto 3.1.8 se añade el texto siguiente: «Una configuración de ensayo para una transmisión con diferencial integrado para el funcionamiento de la tracción en las ruedas delanteras consiste en un dinamómetro en el lado de la entrada de la transmisión y al menos un dinamómetro en el lado o los lados de salida de la transmisión. Los dispositivos de medición del par se instalarán en el lado de entrada y en el lado o los lados de salida de la transmisión. En el caso de las configuraciones de ensayo con un solo dinamómetro en el lado de salida, el extremo de giro libre de la transmisión con diferencial integrado tendrá bloqueado el giro al otro extremo en el lado de salida (por ejemplo, mediante la activación de un bloqueo del diferencial o mediante cualquier otro bloqueo mecánico del diferencial aplicado únicamente para la medición). La graduación del factor ipara para la influencia máxima de las cargas parásitas en un sensor de par específico es igual a los casos anteriormente descritos (A/B/C). Figura 2 A Ejemplo de configuración de ensayo A para la opción 1 para una transmisión con diferencial integrado (por ejemplo, para el funcionamiento de la tracción en las ruedas delanteras) 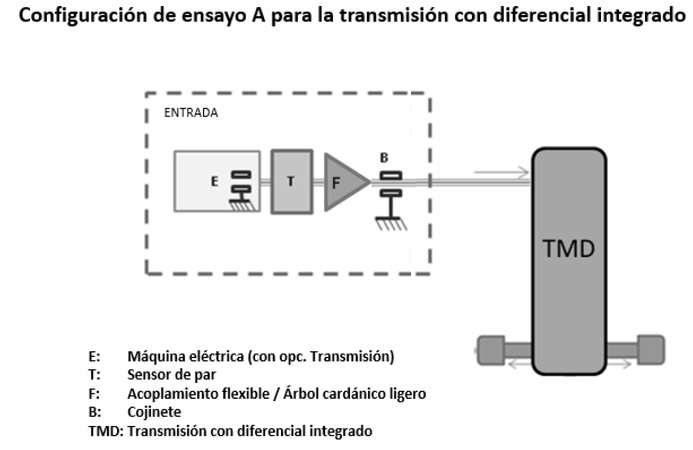 Figura 2 B Ejemplo de configuración de ensayo B para la opción 1 para una transmisión con diferencial integrado (por ejemplo, para el funcionamiento de la tracción en las ruedas delanteras)
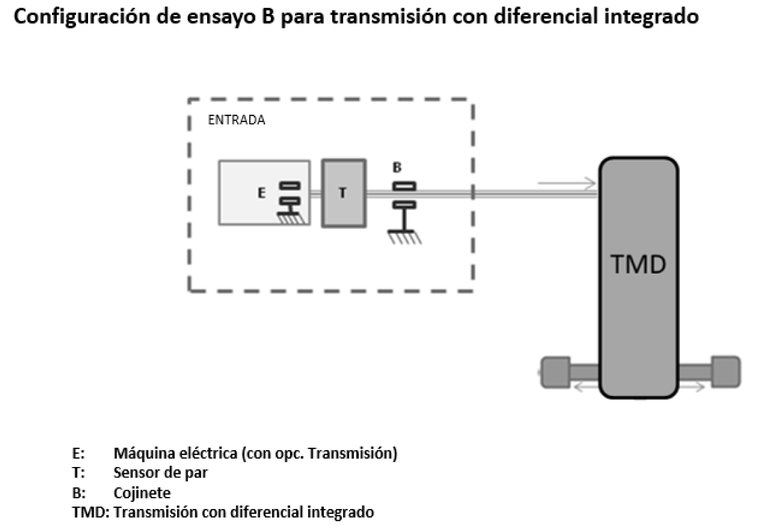
El fabricante podrá adaptar las configuraciones de ensayo A y B sobre la base del buen juicio técnico y de acuerdo con la autoridad de homologación, por ejemplo, en caso de que existan razones prácticas para la configuración del ensayo. En caso de que se produzca tal desviación, el motivo y la configuración alternativa deberán especificarse claramente en el acta de ensayo. Se permite realizar el ensayo sin una unidad de cojinete independiente en el soporte de ensayo en el lado de entrada/salida de la transmisión si el árbol de transmisión en el que se mide el par se apoya en dos cojinetes en la caja de la transmisión capaces de absorber las fuerzas radiales y axiales causadas por los juegos de engranajes. Figura 2 C Ejemplos en los que las fuerzas de la transmisión están aisladas y no aisladas de la entrada:
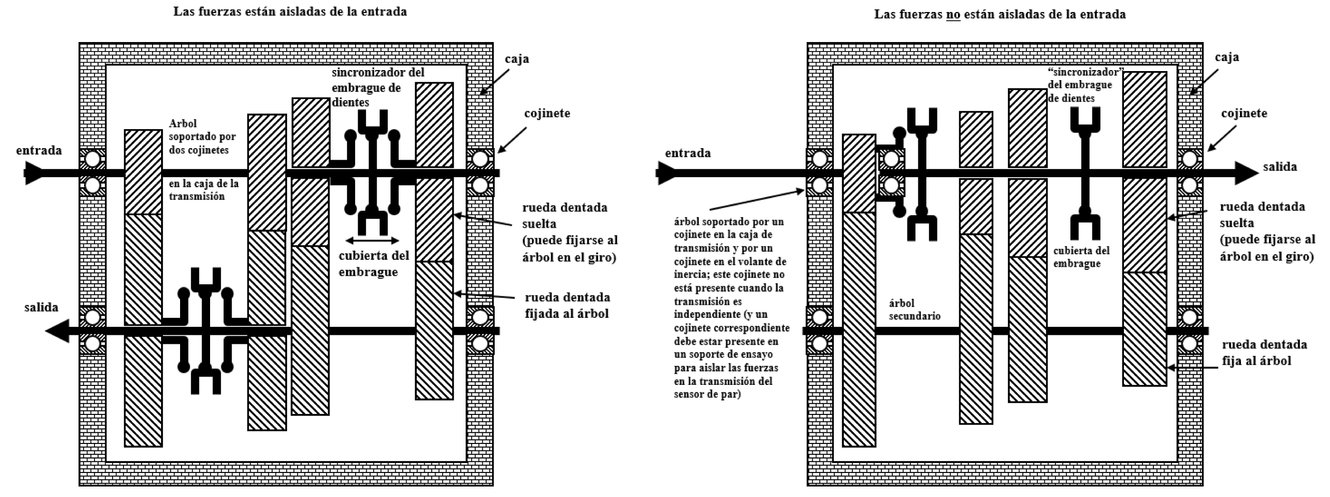 »;
»;
|
|
24) |
en el punto 3.2, en el párrafo tercero, la fórmula se sustituye por lo siguiente: «Tl,in(nin,Tin,gear) = Tl,in,min_loss + fTlino × Tin + Tl,in,min_el + fel_corr × Tin + flosstcc × Tin»; |
|
25) |
en el punto 3.2, el párrafo quinto se sustituye por el texto siguiente: «El factor de corrección para las pérdidas de par eléctrico dependientes del par fel_corr , la pérdida de par en el árbol de entrada de la transmisión causada por el consumo de energía de los accesorios eléctricos de la transmisión Tl,in,el y el factor de corrección de la pérdida floss_tcc por el embrague resbalante TC de bloqueo definido en el punto 2, subpunto 16, o el embrague lateral de entrada resbalante definido en el punto 2, subpunto 20, se calcularán como se describe en el punto 3.1.»; |
|
26) |
en el punto 3.3.3.4, párrafo segundo, el subpunto 2 se sustituye por el texto siguiente:
|
|
27) |
en el punto 3.3.4, el párrafo segundo se sustituye por el texto siguiente: «Deberán instalarse sensores de par en los lados de entrada y de salida de la transmisión.»; |
|
28) |
los puntos 3.3.6.2 y 3.3.6.3 se sustituyen por el texto siguiente:
|
|
29) |
el punto 3.3.6.4.2 se sustituye por el texto siguiente:
|
|
30) |
en el punto 3.3.6.4.3, la primera frase se sustituye por el texto siguiente: «En cada punto de velocidad y de par debe dejarse transcurrir un tiempo de estabilización mínimo de 5 segundos dentro de los límites de temperatura indicados en el punto 3.3.3.»; |
|
31) |
se inserta el punto siguiente:
|
|
32) |
el punto 3.3.8.1 se sustituye por el texto siguiente:
|
|
33) |
en el punto 3.3.8.2, segunda frase, el valor «0,5 %» se sustituye por «1,0 %»; |
|
34) |
el punto 3.3.8.3 se sustituye por el texto siguiente:
|
|
35) |
en el punto 3.3.9, figura 3, el título se sustituye por el texto siguiente: «Ejemplo de configuración de ensayo A para la opción 3»; |
|
36) |
en el punto 3.3.9, figura 4, el título se sustituye por el texto siguiente: «Ejemplo de configuración de ensayo B para la opción 3»; |
|
37) |
en el punto 3.3.9 se añade el texto siguiente: «Una configuración de ensayo para la transmisión con diferencial integrado para el funcionamiento de la tracción en las ruedas delanteras consiste en un dinamómetro en el lado de la entrada de la transmisión y al menos un dinamómetro en el lado o los lados de salida de la transmisión. Los dispositivos de medición del par se instalarán en el lado de entrada y en el lado o los lados de salida de la transmisión. En el caso de las configuraciones de ensayo con un solo dinamómetro en el lado de salida, el extremo de giro libre de la transmisión con diferencial integrado tendrá bloqueado el giro al otro extremo en el lado de salida (por ejemplo, mediante la activación de un bloqueo del diferencial o mediante cualquier otro bloqueo mecánico del diferencial aplicado únicamente para la medición). La graduación del factor ipara para la influencia máxima de las cargas parásitas en los sensores de par específicos es igual a los casos anteriormente descritos (A/B/C). Figura 5 Ejemplo de configuración de ensayo A para una transmisión con diferencial integrado (por ejemplo, para el funcionamiento de la tracción en las ruedas delanteras)
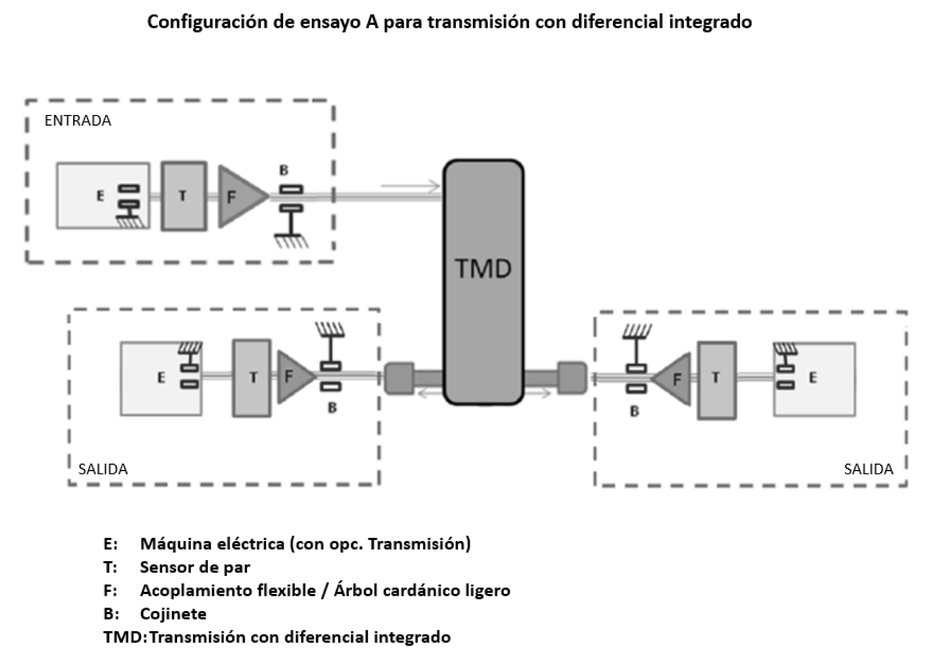
Figura 6 Ejemplo de configuración de ensayo B para una transmisión con diferencial integrado (por ejemplo, para el funcionamiento de la tracción en las ruedas delanteras)
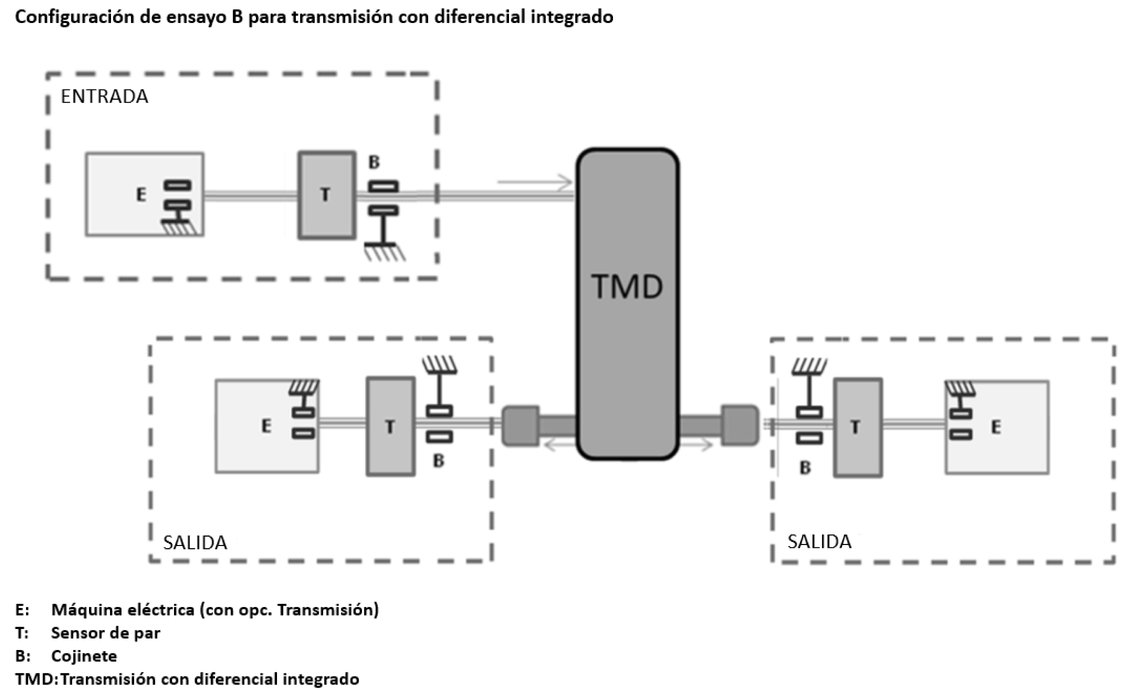
En el caso de un dinamómetro en cada árbol de salida, la incertidumbre total de la pérdida de par (UT,loss ) se calculará como sigue:

El fabricante podrá adaptar las configuraciones de ensayo A y B sobre la base del buen juicio técnico y de acuerdo con la autoridad de homologación, por ejemplo, en caso de que existan razones prácticas para la configuración del ensayo. En caso de que se produzca tal desviación, el motivo y la configuración alternativa deberán especificarse claramente en el acta de ensayo. Se permite realizar el ensayo sin una unidad de cojinete independiente en el soporte de ensayo en el lado de entrada/salida de la transmisión si el árbol de transmisión en el que se mide el par se apoya en dos cojinetes en la caja de la transmisión capaces de absorber las fuerzas radiales y axiales causadas por los juegos de engranajes (véase la figura 2 C del punto 3.1.8).»; |
|
38) |
en el punto 3.4, la primera frase se sustituye por el texto siguiente: «Con respecto a cada marcha deberá determinarse un mapa de pérdida de par que abarque los puntos definidos de velocidad de entrada y par de entrada, con una de las opciones de ensayo especificadas o con los valores de pérdida de par normalizados.»; |
|
39) |
el punto 3.4.1 se sustituye por el texto siguiente: «En los casos en que la velocidad de entrada ensayada más elevada haya sido la del último punto de velocidad por debajo de la velocidad máxima admisible definida de la transmisión, se aplicará una extrapolación de la pérdida de par hasta la velocidad máxima por medio de una regresión lineal basada en los dos últimos puntos de velocidad medidos.»; |
|
40) |
en el punto 3.4.2, la primera frase se sustituye por el texto siguiente: «En los casos en que el par de entrada ensayado más elevado haya sido el del último punto de par por debajo del par máximo admisible definido de la transmisión, se aplicará una extrapolación de la pérdida de par hasta el par máximo por medio de una regresión lineal basada en los dos últimos puntos de par medidos correspondientes al punto de velocidad respectivo.»; |
|
41) |
el punto 3.4.5 se sustituye por el texto siguiente:
|
|
42) |
el punto 3.4.8 se sustituye por el texto siguiente:
|
|
43) |
el punto 4 se sustituye por el texto siguiente:
|
|
44) |
en el punto 4.1.6, el término «ISO/TS» se sustituye por «IATF»; |
|
45) |
en el punto 4.1.7.2.5, la primera frase se sustituye por el texto siguiente: «En cada punto debe dejarse transcurrir un tiempo de estabilización mínimo de 3 segundos dentro de los límites de temperatura indicados en el punto 4.1.2.»; |
|
46) |
el punto 4.1.7.2.6 se sustituye por el texto siguiente:
|
|
47) |
en el punto 4.2.7.2.5, la primera frase se sustituye por el texto siguiente: «En cada punto debe dejarse transcurrir un tiempo de estabilización mínimo de 5 segundos dentro de los límites de temperatura indicados en el punto 4.2.2.»; |
|
48) |
el punto 4.2.7.2.6 se sustituye por el texto siguiente:
|
|
49) |
en el punto 5, el título se sustituye por el texto siguiente: «Procedimiento de ensayo para otros componentes de transferencia de par (OTTC)»; |
|
50) |
en el punto 5.1, cuadro 2, la tercera fila se sustituye por el texto siguiente:
|
|
51) |
el punto 6 se sustituye por el texto siguiente: «6. Procedimiento de ensayo para componentes adicionales del tren de transmisión (ADC) / componente del tren de transmisión con una relación de velocidad única (por ejemplo, reenvío angular)
|
|
52) |
en el punto 7.1, la segunda frase se sustituye por el texto siguiente: «Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir con las disposiciones relativas a la conformidad de la producción que se establecen en el artículo 31 del Reglamento (UE) 2018/858.»; |
|
53) |
el punto 8.1.2.2.1 se sustituye por el texto siguiente:
|
|
54) |
en el punto 8.1.2.2.2, el subpunto 2 se sustituye por el texto siguiente:
|
|
55) |
el punto 8.1.2.3 se sustituye por el texto siguiente:
|
|
56) |
en el punto 8.1.3 se añade el texto siguiente: «La eficiencia de la transmisión homologada ηA,TA se calculará mediante la media aritmética de la eficiencia de dieciocho puntos de funcionamiento durante la certificación sobre la base de las fórmulas de los puntos 8.1.2.3 y 8.1.2.4, definidas por los requisitos del punto 8.1.2.2.2.»; |
|
57) |
en el apéndice 2, parte 1, punto 1.18, la parte introductoria se sustituye por el texto siguiente: «Relaciones de transmisión [-] y par de entrada máximo [Nm], potencia de entrada máxima (kW) y velocidad de entrada máxima [rpm] para la versión con la calificación más alta por miembro de la familia (cuando el mismo miembro de la familia se venda con diferentes denominaciones comerciales).»; |
|
58) |
en el apéndice 2, parte 1, se añade el punto siguiente:
|
|
59) |
en el apéndice 7, punto 1.4, el primer párrafo se sustituye por el texto siguiente: «En la marca de certificación figurará también, cerca del rectángulo, el “número de homologación de base” incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo IV del Reglamento (UE) 2020/683, precedido de las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de un carácter alfanumérico que indica la pieza para la que se ha expedido el certificado.»; |
|
60) |
en el apéndice 7, punto 1.4, segundo párrafo, el número «00» se sustituye por «02»; |
|
61) |
en el apéndice 7, el punto 1.5 se sustituye por el texto siguiente:
|
|
62) |
en el apéndice 7, el punto 2.1 se sustituye por el texto siguiente:
|
|
63) |
en el apéndice 8 se añade el texto siguiente: «En el caso de las transmisiones con diferencial integrado, el diferencial integrado se tratará como un reenvío angular. De este modo, las expresiones Tadd0 , Tadd1000 y fTadd anteriores se utilizarán para el cálculo de Tl,in.»; |
|
64) |
el apéndice 10 se sustituye por el texto siguiente: «Apéndice 10 Valores normalizados de la pérdida de par. Otros componentes de transferencia de par Valores normalizados de la pérdida de par calculados para otros componentes de transferencia de par: En el caso de los ralentizadores hidrodinámicos primarios (aceite o agua) que incluyen la funcionalidad de lanzada del vehículo (vehicle launch), el par de arrastre del ralentizador se calculará como sigue:

En el caso de otros ralentizadores hidrodinámicos (aceite o agua), el par de arrastre del ralentizador se calculará como sigue:

En el caso de ralentizadores magnéticos (permanentes o electromagnéticos), el par de arrastre del ralentizador se calculará como sigue:

donde:
|
|
65) |
en el apéndice 11, el título se sustituye por el texto siguiente: «Valores normalizados de pérdida de par. Reenvío angular engranado o componente del tren de transmisión con una relación de velocidad única»; |
|
66) |
en el apéndice 11, la parte introductoria del primer párrafo se sustituye por el texto siguiente: «En consonancia con los valores normalizados de pérdida de par para la combinación de una transmisión con un reenvío angular engranado del apéndice 8, las pérdidas de par estándar de un reenvío angular engranado o de un componente del tren de transmisión con una relación de velocidad única sin transmisión se calcularán a partir de:»; |
|
67) |
en el apéndice 12, cuadro 1, quinta columna, el texto de la séptima fila se sustituye por el texto siguiente: «Valores permitidos(1): “SMT”, “AMT”, “APT-S”, “APT-P”, “APT-N”, “IHPC Type 1”»; |
|
68) |
en el apéndice 12, se añaden las siguientes filas al cuadro 1:
|
|
69) |
en el apéndice 12, cuadro 2, quinta columna, tercera fila, se inserta la descripción siguiente: «En el caso de la transmisión con diferencial incluido, la relación de transmisión solo se indicará sin tener en cuenta la relación de transmisión por eje»; |
|
70) |
en el apéndice 12, el título del cuadro 6 se sustituye por el texto siguiente: «Parámetros de entrada “ADC/General” (solo si el componente es aplicable)»; |
|
71) |
en el apéndice 12, el título del cuadro 7 se sustituye por el texto siguiente: «Parámetros de entrada “ADC/LossMap” para cada punto de la cuadrícula del mapa de pérdida (solo si el componente es aplicable)». |
|
1) |
En el punto 2, subpunto 2, la última frase se sustituye por el texto siguiente: «Por lo general, la primera reducción es un engranaje cónico y la segunda, un engranaje recto (o un engranaje helicoidal) con excentricidad vertical junto a las ruedas.»; |
|
2) |
en el punto 3, el párrafo primero se sustituye por el texto siguiente: «Los engranajes y todos los cojinetes del eje serán nuevos para la verificación de las pérdidas por eje, mientras que los cojinetes de los extremos de las ruedas ya pueden haber rodado y haber sido utilizados en múltiples mediciones.»; |
|
3) |
en el punto 4.1.3, la última frase se sustituye por el texto siguiente: «En caso de que se ensayen diferentes variantes de relación de transmisión con una caja de eje, se rellenará aceite nuevo para cada medición individual del sistema de ejes completo.»; |
|
4) |
en el punto 4.2.3, párrafo primero, la última frase se sustituye por el texto siguiente: «En el caso de las configuraciones de tipo A con un solo dinamómetro en el lado de salida, el extremo del eje que gira libremente tendrá bloqueado el giro al otro extremo en el lado de salida (por ejemplo, mediante la activación de un bloqueo del diferencial o mediante cualquier otro bloqueo mecánico del diferencial aplicado únicamente para la medición).»; |
|
5) |
en el punto 4.2.3, párrafo tercero, la última frase se sustituye por el texto siguiente: «En la figura 1 se muestra un ejemplo de configuración de ensayo de tipo A en una configuración con dos dinamómetros.»; |
|
6) |
en el punto 4.3.1, primera frase, el término «ISO/TS» se sustituye por «IATF»; |
|
7) |
en el punto 4.3.2, inciso v), se añade el texto siguiente: «[°C] (opcional)»; |
|
8) |
el punto 4.3.3 se sustituye por el texto siguiente:
|
|
9) |
el punto 4.3.3.2 se sustituye por el texto siguiente:
|
|
10) |
en el punto 4.3.4.2, la primera frase se sustituye por el texto siguiente: «La velocidad máxima de la rueda se medirá teniendo en cuenta el diámetro del neumático más pequeño aplicable a una velocidad del vehículo de 90 km/h en el caso de los camiones medios y pesados y de 110 km/h en el caso de los autobuses pesados.»; |
|
11) |
el punto 4.3.5 se sustituye por el texto siguiente:
|
|
12) |
en el punto 4.4.1, la primera frase se sustituye por el texto siguiente: «Para cada fase de velocidad, la pérdida del par de la rueda se medirá para cada fase del par de salida, comenzando con el valor más bajo de par aumentando hasta el máximo y disminuyendo hasta el mínimo.»; |
|
13) |
el punto 4.4.2 se sustituye por el texto siguiente:
|
|
14) |
en el punto 4.4.6, párrafo segundo, se suprime la primera fórmula; |
|
15) |
en el punto 4.4.6, párrafo segundo, en la nota explicativa correspondiente a «ΔK», el texto «ΔK = 15K» se sustituye por «ΔK = 15»; |
|
16) |
el punto 4.4.7 se sustituye por el texto siguiente:
|
|
17) |
el punto 4.4.8.2 se sustituye por el texto siguiente:
|
|
18) |
en el punto 5.1, la última frase se sustituye por el texto siguiente: «Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 31 del Reglamento (UE) 2018/858.»; |
|
19) |
en el punto 6.2.2, inciso iii), se añade la frase siguiente: «Si el punto seleccionado se encuentra en medio de dos puntos homologados, se utilizará el punto superior.»; |
|
20) |
en el punto 6.2.5, la última frase se sustituye por el texto siguiente: «Esto puede hacerse antes del procedimiento de rodaje o tras este de conformidad con el punto 3.1, o bien por extrapolación de todos los valores del mapa de par para cada fase de velocidad descendiendo hasta 0 Nm. La extrapolación deberá ser lineal o de segundo orden polinomial, dependiendo de qué desviación típica sea menor.»; |
|
21) |
en el punto 6.3.1 se añade el texto siguiente: «En el caso de un eje portátil único con una longitud diferente de los dos árboles de salida, también se permite una configuración de ensayo con dos máquinas eléctricas y dos sensores de par en cada salida. A este respecto, ambos árboles de salida se accionan de forma sincronizada en el sentido de la marcha. El par de resistencia final está representado por la suma de ambos pares de salida.»; |
|
22) |
en el punto 6.4.1, el cuadro 2 se sustituye por el texto siguiente: «Cuadro 2
|
|
23) |
en el apéndice 2, parte 1, el punto 1.3 se sustituye por el texto siguiente:
|
|
24) |
en el apéndice 2, parte 1, el punto 1.5 se sustituye por el texto siguiente:
|
|
25) |
en el apéndice 2, parte 1, el punto 1.6 se sustituye por el texto siguiente:
|
|
26) |
en el apéndice 2, parte 1, el punto 1.8 se sustituye por el texto siguiente:
|
|
27) |
en el apéndice 2, parte 1, el punto 1.9 se sustituye por el texto siguiente:
|
|
28) |
en el apéndice 2, parte 1, el punto 1.10 se sustituye por el texto siguiente:
|
|
29) |
en el apéndice 2, parte 1, el punto 1.10.1 se sustituye por el texto siguiente:
|
|
30) |
en el apéndice 2, parte 1, el punto 1.10.2 se sustituye por el texto siguiente:
|
|
31) |
en el apéndice 2, parte 1, el punto 1.11 se sustituye por el texto siguiente:
|
|
32) |
en el apéndice 2, parte 1, el punto 1.12 se sustituye por el texto siguiente:
|
|
33) |
el apéndice 3 se sustituye por el texto siguiente: «Apéndice 3 Cálculo de la pérdida normalizada de par En el cuadro 1 se indican las pérdidas normalizadas de par relativas a los ejes. Los valores normalizados del cuadro consisten en la suma de un valor constante de eficiencia genérico que abarca las pérdidas dependientes de la carga y la pérdida genérica del par de resistencia básico al objeto de abarcar las pérdidas de resistencia con cargas bajas. Los ejes tándem se calcularán utilizando un valor de eficiencia combinada para un eje incluyendo la transmisión (SRT, HRT) más el correspondiente eje único (SR, HR). Cuadro 1 Eficiencia genérica y pérdida de resistencia
El par de resistencia básico (lado de la rueda) Td0 se calculará como sigue: Td0 = T0 + T1 × igear utilizando los valores del cuadro 1. La pérdida normalizada de par Tloss,stden en el lado de la entrada del eje se calculará como sigue:

donde:
El par correspondiente (en el lado de entrada) del eje se calculará como sigue:
donde:
|
|
34) |
en el apéndice 4, punto 3.1, la letra o) se sustituye por el texto siguiente:
|
|
35) |
en el apéndice 4, punto 3.1, se añade el texto siguiente:
|
|
36) |
en el apéndice 5, el punto 1.4 se sustituye por el texto siguiente: «En la marca de certificación figurará también, cerca del rectángulo, el “número de certificación de base” incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo IV del Reglamento (UE) 2020/683, precedido por las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de la letra “L” que indica que el certificado se refiere a un eje. Para el presente Reglamento, el número secuencial será el 02.»; |
|
37) |
en el apéndice 5, el punto 1.4.1 se sustituye por el texto siguiente:
|
|
38) |
en el apéndice 5, el punto 2.1 se sustituye por el texto siguiente:
|
|
1) |
el punto 1 se sustituye por el texto siguiente:
|
|
2) |
en el punto 3, párrafo primero, la última frase se sustituye por el texto siguiente: «El valor Cd·Adeclared será el dato de entrada de la herramienta de simulación y el valor de referencia para el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas.» |
|
3) |
el punto 3.3 se sustituye por el texto siguiente:
(*1) Reglamento n.o 54 de la Comisión Económica para Europa de las Naciones Unidas (CEPE): prescripciones uniformes relativas a la homologación de neumáticos para vehículos industriales y sus remolques (DO L 183 de 11.7.2008, p. 41)." |
|
4) |
en el punto 3.4, primera frase, el término «ISO/TS» se sustituye por «IATF»; |
|
5) |
el punto 3.4.1.2 se sustituye por el texto siguiente:
donde: “No linealidad” significa la desviación máxima entre las características ideales y reales de la señal de salida en relación con el mensurando en un intervalo específico de medición. “Repetibilidad” significa el grado de concordancia entre los resultados de sucesivas mediciones del mismo mensurando realizadas en las mismas condiciones de medición. “Diafonía” significa toda señal en la salida principal de un sensor (My), producida por un mensurando (Fz) que actúa sobre el sensor, diferente del mensurando asignado a dicha salida. La asignación del sistema de coordenadas se define de conformidad con la norma ISO 4130. Los datos de par registrados se corregirán teniendo en cuenta el margen de error determinado por el proveedor.»; |
|
6) |
el punto 3.4.3 se sustituye por el texto siguiente:
|
|
7) |
el punto 3.4.7.2 se sustituye por el texto siguiente:
|
|
8) |
en el punto 3.4.9, párrafo primero, la última frase se sustituye por el texto siguiente: «El sensor infrarrojo se calibrará de acuerdo con las normas ASTM E2847 o VDI/VDE 3511.»; |
|
9) |
en el punto 3.5.2, la segunda frase se sustituye por el texto siguiente: «velocidad máxima: 95 km/h para camiones medios y pesados y 103 km/h para autobuses pesados;»; |
|
10) |
en el punto 3.5.3.1, inciso vi), la última frase se sustituye por el texto siguiente: «Deberá realizarse un ensayo de calibración de la desalineación cada vez que el anemómetro se haya montado por primera vez en el vehículo o se haya ajustado.»; |
|
11) |
en el punto 3.5.3.1, el inciso vii) se sustituye por el texto siguiente:
|
|
12) |
en el punto 3.5.3.3, la última frase se sustituye por el texto siguiente: «La fase de parada no excederá de quince minutos.»; |
|
13) |
en el punto 3.5.3.4, la última frase se sustituye por el texto siguiente: «La fase de calentamiento con arreglo al presente punto no será más breve que la fase de parada ni superior a treinta minutos.»; |
|
14) |
en el punto 3.5.3.5 se añade el siguiente inciso:
|
|
15) |
en el punto 3.6.3, la última frase se sustituye por el texto siguiente: «Las señales de los pares de ruedas y de la velocidad media del motor, del cardan o de las ruedas no se utilizan en la evaluación.»; |
|
16) |
el punto 3.6.5, letra c), se sustituye por el texto siguiente:
|
|
17) |
en el punto 3.9, el cuadro 2 se sustituye por el texto siguiente: «Cuadro 1 Datos de entrada para la herramienta de preprocesamiento de resistencia aerodinámica; archivo de datos del vehículo
|
|
18) |
en el punto 3.9, cuadro 5, la décima fila se sustituye por el texto siguiente:
|
|
19) |
en el punto 3.10.1.1, inciso viii), la sección sobre el ensayo a baja velocidad se sustituye por lo siguiente: «Ensayo a baja velocidad: (Tlms,avrg – Tgrd) × (1 – tol) ≤ (Tlms,avrg – Tgrd) ≤ (Tlms,avrg – Tgrd) × (1 + tol) Tgrd = Fgrd,avrg × rdyn,avrg donde:
|
|
20) |
en el punto 3.10.1.1, inciso xi), la primera frase se sustituye por el texto siguiente: «comprobación de la plausibilidad de la velocidad del motor, la velocidad cardánica o la velocidad media de las ruedas, según proceda:»; |
|
21) |
en el punto 3.10.1.1, inciso xi), después de la primera frase, el texto «velocidad del motor» se sustituye por «velocidad del motor o velocidad media de las ruedas» y el texto «velocidad media del motor» se sustituye por «velocidad media del motor o velocidad media de las ruedas», en seis casos; |
|
22) |
en el punto 3.11, el último párrafo se sustituye por el texto siguiente: «Podrán crearse varios valores declarados Cd·Adeclared sobre la base de una única medición Cd·Acr (0) en tanto en cuanto se reúnan las disposiciones relativas a la familia de conformidad con el apéndice 5, punto 3.1, para los camiones medios y pesados, y el apéndice 5, punto 4.1, para los autobuses pesados.»; |
|
23) |
en el apéndice 2, parte 1, el punto 1.2 se sustituye por el texto siguiente:
|
|
24) |
el apéndice 3 se sustituye por el texto siguiente: «Apéndice 3 Requisitos relativos a la altura del vehículo para camiones rígidos y tractocamiones
|
|
25) |
en el apéndice 4, el título se sustituye por el texto siguiente: «Configuraciones estándar de carrocería y semirremolque para camiones rígidos y tractocamiones»; |
|
26) |
en el apéndice 4, el punto 1 se sustituye por el texto siguiente: «Los camiones rígidos medios y los camiones rígidos pesados sujetos a la determinación de la resistencia aerodinámica deberán cumplir los requisitos relativos a la carrocería estándar descritos en el presente apéndice. Los tractocamiones deberán cumplir los requisitos de los semirremolques estándar descritos en el presente apéndice.»; |
|
27) |
en el apéndice 4, punto 2, el cuadro 8 se sustituye por el cuadro siguiente: «Cuadro 3 Asignación de carrocerías y semirremolques estándar para ensayos de velocidad constante
|
|
28) |
en el apéndice 4, el punto 3 se sustituye por el texto siguiente: «Las carrocerías estándar B-II, B1, B2, B3, B4 y B5 se construirán como carrocerías rígidas con un diseño de caja para carga seca. Estarán equipadas con dos puertas traseras, sin ninguna puerta lateral. Las carrocerías estándar no estarán equipadas con plataformas elevadoras, deflectores frontales ni carenados laterales para la reducción de la resistencia aerodinámica. Las especificaciones de las carrocerías estándar se exponen en:
|
|
29) |
en el apéndice 4, punto 5, se inserta el cuadro siguiente: «Cuadro 9 bis Especificaciones de la carrocería estándar “B-II”
|
|
30) |
en el apéndice 4, punto5, cuadros 9, 10, 11, 12 y 13, cuarta columna, la séptima fila se sustituye por el texto siguiente: «La masa se utiliza como valor genérico en la herramienta de simulación y no es necesario verificarla para los ensayos de resistencia aerodinámica»; |
|
31) |
en el apéndice 5, el título se sustituye por el texto siguiente: «Familia de resistencia aerodinámica»; |
|
32) |
en el apéndice 5, punto 1, la tercera frase se sustituye por el texto siguiente: «El fabricante podrá decidir qué vehículos pertenecen a una familia de resistencia aerodinámica siempre que se respeten los criterios de pertenencia enumerados en el punto 3 para los camiones medios y pesados y en el punto 6 para los autobuses pesados.»; |
|
33) |
en el apéndice 5, punto 2, el segundo párrafo se sustituye por el texto siguiente: «Además de los parámetros enumerados en el punto 4 del presente apéndice para los camiones medios y pesados y en su punto 6.1 para los autobuses pesados, el fabricante podrá introducir criterios adicionales que permitan la definición de familias de tamaño más reducido.»; |
|
34) |
en el apéndice 5, el punto 4 se sustituye por el texto siguiente:
|
|
35) |
en el apéndice 5, punto 4.1, la primera frase se sustituye por el texto siguiente: «Los camiones medios y pesados podrán agruparse dentro de una familia si pertenecen al mismo grupo de vehículos con arreglo al cuadro 1 o al cuadro 2 del anexo I y se cumplen los criterios siguientes:»; |
|
36) |
en el apéndice 5, punto 4.1, letra c), la primera frase se sustituye por el texto siguiente: «Para vehículos con bastidor: igual altura de la cabina sobre el bastidor.»; |
|
37) |
en el apéndice 5, el punto 5 se sustituye por el texto siguiente:
|
|
38) |
en el apéndice 5, el punto 5.2 se sustituye por el texto siguiente:
|
|
39) |
en el apéndice 5, el punto 5.4 se sustituye por el texto siguiente:
|
|
40) |
en el apéndice 5, el punto 5.5 se sustituye por el texto siguiente:
|
|
41) |
en el apéndice 5, se insertan los siguientes puntos:
|
|
42) |
en el apéndice 6, el punto 3 se sustituye por el texto siguiente:
|
|
43) |
en el apéndice 6, el punto 4.6 se sustituye por el texto siguiente:
|
|
44) |
el apéndice 7 se sustituye por el texto siguiente: «Apéndice 7 Valores normalizados El presente apéndice describe los valores normalizados para el valor de resistencia aerodinámica declarado Cd·Adeclared . Si se aplican valores normalizados, no se introducirán datos de entrada sobre la resistencia aerodinámica en la herramienta de simulación. En ese caso, la asignación de los valores normalizados será efectuada automáticamente por la herramienta de simulación.
|
|
45) |
en el apéndice 8, el texto del encabezamiento se sustituye por el texto siguiente: «Marcados Un vehículo certificado de conformidad con el presente anexo deberá llevar en la cabina o en la carrocería:»; |
|
46) |
en el apéndice 8, el punto 1.4 se sustituye por el texto siguiente: «En la marca de certificación figurará también, cerca del rectángulo, el “número de certificación de base” incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo I del Reglamento (UE) 2020/683 precedido por las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de la letra “P” que indica que la homologación se refiere a la resistencia aerodinámica. Para el presente Reglamento, el número secuencial será el 02.»; |
|
47) |
en el apéndice 8, el punto 1.4.1 se sustituye por el texto siguiente: «Ejemplos y dimensiones de la marca de certificación
Esta marca de certificación fijada en una cabina indica que el tipo de que se trata ha sido certificado en Polonia (e20) con arreglo al presente Reglamento. Los dos primeros dígitos (02) indican el número secuencial asignado a la última modificación técnica del presente Reglamento. La letra siguiente indica que el certificado se ha expedido con relación la resistencia aerodinámica (P). Los cinco últimos dígitos (00005) son los que la autoridad de homologación ha asignado a la resistencia aerodinámica como número de certificación de base.»; |
|
48) |
en el apéndice 8, el punto 2.1 se sustituye por el texto siguiente: «El número de certificación de la resistencia aerodinámica deberá comprender lo siguiente: eX*YYYY/YYYY*ZZZZ/ZZZZ*P*00000*00
|
|
49) |
en el apéndice 9, cuadro 1, la séptima fila se sustituye por el texto siguiente:
|
(*1) Reglamento n.o 54 de la Comisión Económica para Europa de las Naciones Unidas (CEPE): prescripciones uniformes relativas a la homologación de neumáticos para vehículos industriales y sus remolques (DO L 183 de 11.7.2008, p. 41).»
(1) especificación de las relaciones de transmisión con un mínimo de tres dígitos tras el separador decimal
(2) si la señal de velocidad cardánica o la señal de velocidad media de las ruedas se transmiten a la herramienta de preprocesamiento de la resistencia aerodinámica (véase el punto 3.4.3; opción 1 para vehículos con convertidores de par u opción 2) el parámetro de entrada de la desmultiplicación final se ajustará a “1 000”
(1) solo se requiere dato de entrada si el valor es inferior a 88 km/h
(3) si se proporciona la velocidad media de las ruedas a la herramienta de preprocesamiento de la resistencia aerodinámica (véase el punto 3.4.3, opción 2), los parámetros de entrada de las relaciones de transmisión se ajustarán a “1 000” »;
(*2) El ensayo de conformidad de la producción se realizará en los dos primeros años
VERIFICACIÓN DE LOS DATOS DE LOS ACCESORIOS DE CAMIONES Y AUTOBUSES
1. Introducción
El presente anexo describe las disposiciones relativas a la declaración de tecnologías y otra información de entrada pertinente sobre los sistemas accesorios de los vehículos pesados a efectos de la determinación de las emisiones específicas de CO2 de los vehículos.
El consumo de energía de los siguientes tipos de accesorios se considerará dentro de la herramienta de simulación utilizando modelos genéricos basados en promedios de las tecnologías específicas para el consumo de energía:
|
a) |
Ventilador de refrigeración del motor |
|
b) |
Sistema de dirección |
|
c) |
Sistema eléctrico |
|
d) |
Sistema neumático |
|
e) |
Sistema de calefacción, ventilación y aire acondicionado (HVAC) |
|
f) |
Toma de fuerza de la transmisión (PTO) |
Los valores genéricos se integran en la herramienta de simulación y se utilizan automáticamente sobre la base de la información de entrada pertinente de conformidad con las disposiciones del presente anexo. Los formatos de datos de entrada correspondientes para la herramienta de simulación se describen en el anexo III. Para una referencia clara, también se enumeran en el presente anexo los ID de los parámetros de tres dígitos utilizados en el anexo III.
2. Definiciones
A efectos del presente anexo, serán de aplicación las definiciones siguientes. El tipo de accesorio correspondiente se indica entre paréntesis.
|
1) |
“Ventilador montado en el cigüeñal”: instalación del ventilador en que este se mueve en la prolongación del cigüeñal, habitualmente gracias a una brida (ventilador de refrigeración del motor). |
|
2) |
“Ventilador movido por correa o transmisión”: ventilador instalado en una posición en que es necesaria una correa, un sistema de tensión o una transmisión adicional (ventilador de refrigeración del motor). |
|
3) |
“Ventilador hidráulico”: ventilador movido mediante aceite hidráulico, a menudo instalado lejos del motor. Un sistema hidráulico con sistema de aceite, bomba y válvulas influye en las pérdidas y eficiencias del sistema (ventilador de refrigeración del motor). |
|
4) |
“Ventilador eléctrico”: un ventilador impulsado por un motor eléctrico. Se tiene en cuenta la eficiencia para la conversión completa de energía, incluida la entrada y la salida de la batería (ventilador de refrigeración del motor); |
|
5) |
“Embrague viscoso con control electrónico”: embrague en el que se utilizan una serie de datos del sensor junto con lógica computacional para accionar electrónicamente el flujo de fluido en el embrague viscoso (ventilador de refrigeración del motor). |
|
6) |
“Embrague viscoso con control bimetálico”: embrague en el que se utiliza una conexión bimetálica para transformar un cambio de la temperatura en un desplazamiento mecánico. El desplazamiento mecánico funciona entonces como accionador del embrague viscoso (ventilador de refrigeración del motor). |
|
7) |
“Embrague discontinuo”: un dispositivo mecánico que solo puede accionarse en etapas distintas (variable no continua) (ventilador de refrigeración del motor). |
|
8) |
“Embrague conectado/desconectado” embrague mecánico totalmente engranado o totalmente desengranado (ventilador de refrigeración del motor). |
|
9) |
“Bomba de desplazamiento variable”: un dispositivo que transforma la energía mecánica en energía de fluido hidráulico. La cantidad de fluido bombeado por revolución de la bomba puede variar mientras esta está en funcionamiento (ventilador de refrigeración del motor). |
|
10) |
“Bomba de desplazamiento constante”: un dispositivo que transforma la energía mecánica en energía de fluido hidráulico. La cantidad de fluido bombeado por revolución de la bomba no puede variar mientras esta está en funcionamiento (ventilador de refrigeración del motor). |
|
11) |
“Control de motor eléctrico”: utilización de un motor eléctrico para impulsar el ventilador. La máquina eléctrica convierte la energía eléctrica en energía mecánica. La potencia y la velocidad son controladas mediante la tecnología convencional de los motores eléctricos (ventilador de refrigeración del motor). |
|
12) |
“Bomba de desplazamiento fijo (tecnología por defecto)”: bomba cuyo caudal tiene una limitación interna (sistema de dirección). |
|
13) |
“Bomba de desplazamiento fijo con control electrónico”: bomba que utiliza un control electrónico del caudal (sistema de dirección). |
|
14) |
“Bomba de desplazamiento dual”: bomba con dos cámaras (con idéntico o distinto desplazamiento) y con limitación mecánica interna del caudal (sistema de dirección). |
|
14 bis) |
“Bomba de desplazamiento dual con control electrónico”: bomba con dos cámaras (con idéntico o distinto desplazamiento) que puede combinarse o de las cuales, en condiciones específicas, solo se utiliza una. El caudal está controlado electrónicamente por una válvula (sistema de dirección). |
|
15) |
“Bomba de desplazamiento variable con control mecánico”: bomba en la que el desplazamiento se controla internamente de forma mecánica (escalas de presión interna) (sistema de dirección). |
|
16) |
“Bomba de desplazamiento variable con control electrónico”: bomba en la que el desplazamiento se controla electrónicamente (sistema de dirección). |
|
17) |
“Bomba de dirección eléctrica”: sistema de dirección accionado por un motor eléctrico con fluido hidráulico de recirculación continua (sistema de dirección). |
|
17 bis) |
“Dispositivo de dirección totalmente eléctrico: sistema de dirección accionado por un motor eléctrico con fluido hidráulico de recirculación continua (sistema de dirección). |
|
18) |
- |
|
19) |
“Compresor de aire con sistema de ahorro de energía” o “ESS”: un compresor que reduce el consumo de potencia durante la descarga, p. ej. cerrando el lado de la admisión; el ESS está controlado por la presión del aire del sistema (sistema neumático). |
|
20) |
“Embrague del compresor (viscoso)”: compresor que puede desembragarse en el que el embrague está controlado por la presión del sistema de aire (sin estrategia inteligente); puede registrar pérdidas menores durante el desembrague causadas por el embrague viscoso (sistema neumático). |
|
21) |
“Embrague del compresor (mecánico)”: compresor que puede desembragarse en el que el embrague está controlado por la presión del sistema de aire (sin estrategia inteligente) (sistema neumático). |
|
22) |
“Sistema de gestión del aire con regeneración optimizada” o “AMS”: unidad electrónica de tratamiento del aire que combina un secador de aire controlado electrónicamente para optimizar la regeneración del aire y el caudal de aire preferido en condiciones de freno motor (exige un embrague o ESS) (sistema neumático). |
|
23) |
“Diodos emisores de luz” o “LED”: dispositivos semiconductores que emiten luz visible cuando los atraviesa una corriente eléctrica (sistema eléctrico). |
|
24) |
- |
|
25) |
“Toma de fuerza” o “PTO”: dispositivo situado en una transmisión o en un motor al que puede conectarse un dispositivo opcional de consumo de energía (“consumidor”), por ejemplo, una bomba hidráulica; habitualmente, una toma de fuerza es opcional (PTO). |
|
26) |
“Mecanismo de accionamiento de la toma de fuerza”: dispositivo presente en una transmisión que permite la instalación de una toma de fuerza (PTO). |
|
26 bis) |
“Corona engranada”: corona que está engranada con árboles en marcha del motor o de la transmisión mientras el embrague de la toma de fuerza (en su caso) está abierto (PTO). |
|
27) |
“Embrague de dientes”: embrague (maniobrable) en el que el par se transfiere principalmente mediante fuerzas perpendiculares entre dientes coincidentes. El embrague de dientes puede estar engranado o desengranado. Solo funciona en condiciones sin carga (p. ej. en los cambios de marcha de una transmisión manual) (PTO). |
|
28) |
“Sincronizador”: tipo de embrague de dientes en el que se utiliza un dispositivo de fricción para ecualizar las velocidades de las piezas giratorias que deben engranarse (PTO). |
|
29) |
“Embrague multidisco”: embrague en el que se colocan en paralelo varios forros de fricción de manera que todas las parejas de fricción reciban la misma fuerza de presión. Los embragues multidisco son compactos y pueden ser engranados y desengranados en condiciones de carga. Se pueden concebir como embragues secos o húmedos (PTO). |
|
30) |
“Rueda dentada desplazable”: una corona utilizada como elemento del cambio de marchas, en el que el cambio se realiza desplazando la corona sobre su árbol dentro o fuera del engrane de la rueda conjugada (PTO). |
|
31) |
“Embrague discontinuo (desconectado + 2 etapas)”: un dispositivo mecánico que solo puede accionarse en dos etapas distintas o estar desconectado (variable no continua) (ventilador de refrigeración del motor). |
|
32) |
“Embrague discontinuo (desconectado + 3 etapas)”: un dispositivo mecánico que solo puede accionarse en tres etapas distintas o estar desconectado (variable no continua) (ventilador de refrigeración del motor). |
|
33) |
“Relación de compresión al motor”: relación de transmisión hacia delante de la velocidad del motor respecto a la velocidad del compresor de aire sin resbalamiento (i = nin/nout) (sistema neumático). |
|
34) |
“Control mecánico de la suspensión neumática”: sistema de suspensión neumática en el que las válvulas de control de la suspensión neumática funcionan mecánicamente sin componentes electrónicos ni programas informáticos (sistema neumático). |
|
35) |
“Control electrónico de la suspensión neumática”: sistema de suspensión neumática en el que se utilizan una serie de entradas de sensores junto con la lógica del software para accionar electrónicamente las válvulas de control de la suspensión neumática (sistema neumático). |
|
36) |
“Dosificación neumática del reactivo SCR”: utilización de aire comprimido para dosificar el reactivo en el sistema de escape (sistema neumático). |
|
37) |
“Tecnología neumática de accionamiento de puertas”: las puertas de pasajeros del vehículo funcionan con aire comprimido (sistema neumático). |
|
38) |
“Tecnología eléctrica de accionamiento de puertas”: las puertas de pasajeros del vehículo funcionan con un motor eléctrico o con un sistema electrohidráulico (sistema neumático). |
|
39) |
“Tecnología mixta de accionamiento de puertas”: tanto la “tecnología neumática de conducción de puertas” como la “tecnología de conducción de puertas eléctrica” están instaladas en el vehículo (sistema neumático). |
|
40) |
“Sistema de regeneración inteligente”: sistema neumático en el que se optimiza la demanda de regeneración del aire con respecto a la cantidad de aire seco que se produce (sistema neumático). |
|
41) |
“Sistema de compresión inteligente”: sistema neumático en el que el caudal de aire se controla electrónicamente con el caudal de aire preferido en condiciones de freno motor (sistema neumático). |
|
42) |
“Luces interiores”: las luces situadas en el compartimento de pasajeros que están instaladas para cumplir los requisitos del punto 7.8 (“Iluminación interior artificial”) del anexo 3 del Reglamento n.o 107 de las Naciones Unidas (*1) (sistema eléctrico). |
|
43) |
“Luces de circulación diurna”: las “luces de circulación diurna” con arreglo al punto 2.7.25 del Reglamento n.o 48 de las Naciones Unidas (*2) (sistema eléctrico). |
|
44) |
“Luces de posición”: las “luces de posición lateral” con arreglo al punto 2.7.24 del Reglamento n.o 48 de las Naciones Unidas (sistema eléctrico). |
|
45) |
“Luces de frenado”: las “luces de frenado” con arreglo al punto 2.7.12 del Reglamento n.o 48 de las Naciones Unidas (sistema eléctrico). |
|
46) |
“Faros”: la “luz de cruce”, con arreglo al punto 2.7.10 del Reglamento n.o 48 de las Naciones Unidas, y la “luz de carretera”, con arreglo al punto 2.7.9 del Reglamento n.o 48 de las Naciones Unidas (sistema eléctrico). |
|
47) |
“Alternador”: máquina eléctrica que carga la batería y suministra potencia eléctrica al sistema eléctrico auxiliar cuando el motor de combustión interna del vehículo está en funcionamiento. Un alternador no puede contribuir a la propulsión del vehículo (sistema eléctrico). |
|
48) |
“Sistema de alternador inteligente”: sistema de uno o más alternadores en combinación con uno o más SAEER específicos que se controla electrónicamente con la generación preferida de energía eléctrica en condiciones de freno motor (sistema eléctrico). |
|
49) |
“Sistema de calefacción, ventilación y aire acondicionado” o sistema HVAC: sistema que puede calentar o enfriar activamente e intercambiar o sustituir aire para proporcionar una mejor calidad del aire al compartimento de pasajeros o al del conductor del vehículo (sistema HVAC). |
|
50) |
“Configuración del sistema HVAC”: combinación de componentes del sistema HVAC conforme al cuadro 13 del presente anexo (sistema HVAC). |
|
51) |
“Sistema de confort térmico para el compartimento de pasajeros”: sistema que utiliza ventiladores para que el aire circule dentro del vehículo o que controla la admisión de aire nuevo dentro del vehículo y hace que el flujo volumétrico de aire pueda al menos refrigerarse o calentarse activamente. El aire se distribuye desde el techo del vehículo y, en el caso de los vehículos de dos pisos, en ambos. En el caso de los vehículos de dos pisos con el piso superior abierto, en el piso inferior (sistema HVAC). |
|
52) |
“Número de bombas de calor para el compartimento de pasajeros”: número de bombas de calor instaladas en el vehículo para calentar o enfriar el aire de la cabina o el aire nuevo que entra en el compartimento de pasajeros. Si se utiliza una bomba de calor para el compartimento de pasajeros y para el del conductor, se cuenta únicamente para el compartimento de pasajeros (sistema HVAC). Si se instalan diferentes bombas de calor para calefacción y para la refrigeración, el número de bombas de calor será el de menor número de los dos casos, es decir, el número de bombas de calor para refrigeración y el número de bombas de calor para calefacción se considerarán por separado (por ejemplo, en el caso de 2 bombas de calor para refrigeración y 1 bomba de calor para calefacción: solo se tendrá en cuenta 1 bomba de calor). |
|
53) |
“Sistema de aire acondicionado para el compartimento del conductor”: sistema instalado en el vehículo que puede enfriar el aire de la cabina o el aire nuevo suministrado al conductor o al compartimento del conductor (sistema HVAC). |
|
54) |
“Sistema de aire acondicionado para el compartimento de pasajeros”: sistema instalado en el vehículo que puede enfriar el aire de la cabina o el aire nuevo suministrado al compartimento de pasajeros (sistema HVAC). |
|
55) |
“Bomba de calor independiente para el compartimento del conductor”: bomba de calor instalada en el vehículo que solo se utiliza para el compartimento del conductor (sistema HVAC). |
|
56) |
“Bomba de calor de dos fases” bomba de calor que solo puede accionarse en dos etapas, pero no en una variable continua (sistema HVAC). |
|
57) |
“Bomba de calor de tres fases” bomba de calor que solo puede accionarse en tres etapas, pero no en una variable continua (sistema HVAC). |
|
58) |
“Bomba de calor de cuatro fases” bomba de calor que solo puede accionarse en cuatro etapas, pero no en una variable continua (sistema HVAC). |
|
59) |
“Bomba de calor continua” bomba de calor que puede accionarse en una variable continua o en la que el compresor de aire acondicionado es accionado por un motor eléctrico con una velocidad variable continua (sistema HVAC). |
|
60) |
“Potencia del calefactor accesorio”: tal como figura en la etiqueta definida en el punto 4 del anexo 7 del Reglamento n.o 122 de las Naciones Unidas (*3) (sistema HVAC). |
|
61) |
“Doble acristalamiento”: ventanas del compartimento de pasajeros que constan de dos cristales separados por un espacio lleno de gas o por el vacío. En el caso de varios tipos de ventanas dentro del compartimento de pasajeros, deberá seleccionarse el tipo de ventana predominante con respecto a la superficie. Para la evaluación del tipo de ventana predominante, no se tendrán en cuenta el parabrisas, la ventana trasera, las ventanillas laterales del conductor, las ventanas dentro de las puertas, las ventanas situadas encima y delante del eje delantero (véanse ejemplos en la figura 1) ni las ventanas basculantes (sistema HVAC). Figura 1 Ventanas que no deben considerarse para el tipo de ventana predominante
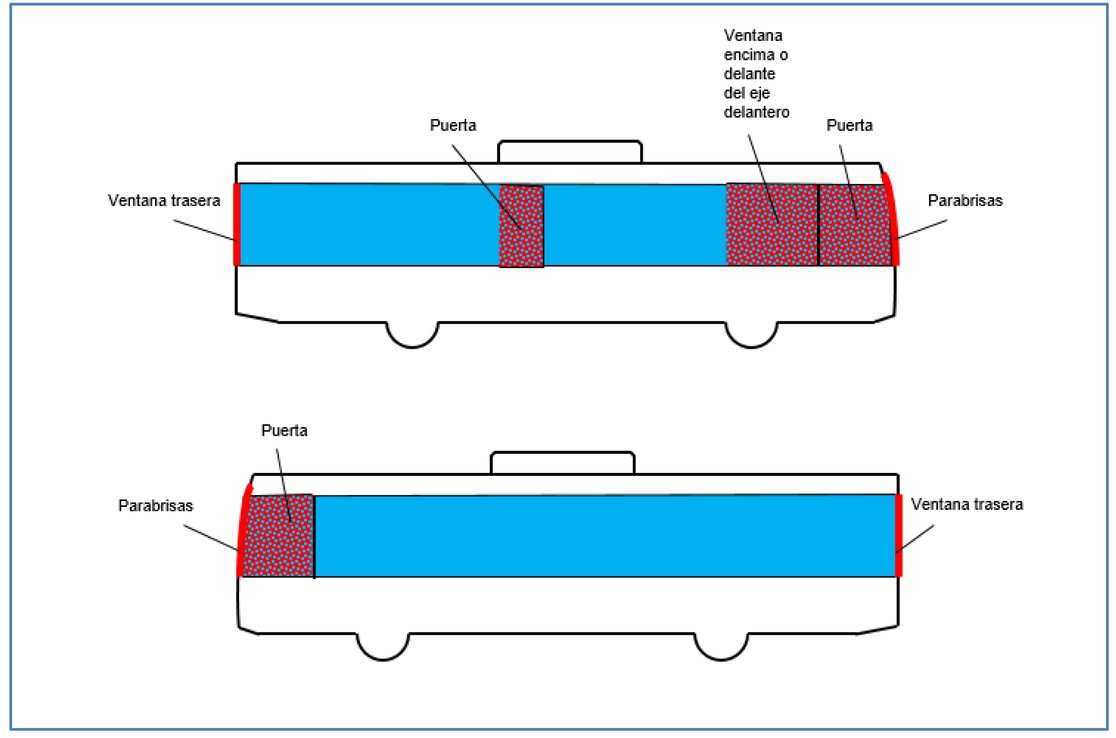
|
|
62) |
“Bomba de calor”: sistema que utiliza un refrigerante en un proceso circular para transferir energía térmica del entorno al compartimento de pasajeros o al del conductor, o transfiere energía térmica en la dirección opuesta (funcionalidad de refrigeración/calefacción) con un coeficiente de rendimiento superior a 1 (sistema HVAC). |
|
63) |
“Bomba de calor R-744”: bomba de calor que utiliza el refrigerante R-744 como fluido de trabajo (sistema HVAC). |
|
64) |
“Bomba de calor no R-744”: bomba de calor que utiliza un fluido de trabajo distinto del refrigerante R-744. Para los grados de accionamiento posibles (2, 3, 4 fases, continuo) serán de aplicación las definiciones 56 a 59 (sistema HVAC). |
|
65) |
“Termostato refrigerante regulable”: termostato refrigerante que se ve influido por al menos una entrada adicional además de la temperatura del refrigerante, por ejemplo, el calentamiento eléctrico activo del termostato (sistema HVAC). |
|
66) |
“Calefactor accesorio regulable”: un calefactor alimentado con combustible que tiene al menos dos niveles de capacidad de calefacción, además de “desactivado”, y que puede controlarse en función de la capacidad requerida del sistema de calefacción en el autobús (sistema HVAC). |
|
67) |
“Intercambiador de calor de gas residual del motor”: intercambiador de calor que utiliza la energía térmica de los gases residuales del motor para calentar el circuito de refrigeración (sistema HVAC). |
|
68) |
“Conductos de distribución de aire separados”: uno o varios canales de aire conectados a un sistema de confort térmico para distribuir el aire acondicionado uniformemente en el compartimento de pasajeros. Los canales de aire pueden incluir los altavoces o el suministro de agua del sistema HVAC y el arnés eléctrico. Los depósitos de aire comprimido no deben instalarse en estos canales. A través de este parámetro del modelo, la herramienta de simulación considera las pérdidas de calor transferidas al medio ambiente o a los componentes dentro del canal. Para las configuraciones del sistema HVAC 8, 9 y 10 de los grupos de vehículos 31, 33, 35, 37 y 39, esta entrada se ajustará en “true”, ya que dichas configuraciones se benefician de pérdidas reducidas, al fluir el aire refrigerado directamente en el interior del vehículo, incluso sin ningún canal de aire. Para todas las configuraciones del sistema HVAC de los grupos de vehículos 32, 34, 36, 38 y 40, este parámetro se ajustará a “true”, ya que se trata de un sistema de última generación (sistema HVAC). |
|
69) |
“Compresor accionado eléctricamente”: compresor accionado por un motor eléctrico (sistema neumático). |
|
70) |
“Calefactor eléctrico de agua”: dispositivo que utiliza energía eléctrica para calentar el refrigerante del vehículo con un coeficiente de rendimiento inferior a 1 y que se utiliza activamente para la funcionalidad de calefacción durante el funcionamiento del vehículo por carretera (sistema HVAC). |
|
71) |
“Calefactor eléctrico de aire”: dispositivo que utiliza energía eléctrica para calentar el aire del compartimento de pasajeros o el del conductor con un coeficiente de rendimiento inferior a 1 (sistema HVAC). |
|
72) |
“Otra tecnología de calefacción”: cualquier tecnología totalmente eléctrica utilizada para calentar el compartimento de pasajeros o el del conductor no incluida en las tecnologías de las definiciones 62, 70 o 71 (sistema HVAC). |
|
73) |
“Batería de plomo-ácido convencional”: batería de plomo a la que no se aplica ninguna de las definiciones 74 o 75 (sistema eléctrico). |
|
74) |
“Batería de plomo AGM”: batería de plomo-ácido en la que se utilizan láminas de fibra de vidrio llenas de electrolitos como separadores entre las placas negativas y positivas (sistema eléctrico). |
|
75) |
“Batería de plomo gel”: baterías de plomo-ácido en las que un gelificante de sílice se mezcla con el electrolito (sistema eléctrico). |
|
76) |
“Batería de ion-litio de gran potencia”: batería de ion-litio en la que la relación numérica entre la corriente máxima nominal en [A] y la capacidad asignada en [Ah] es igual o superior a 10 (sistema eléctrico). |
|
77) |
“Batería de ion-litio de gran energía”: batería de ion-litio en la que la relación numérica entre la corriente máxima nominal en [A] y la capacidad asignada en [Ah] es inferior a 10 (sistema eléctrico). |
|
78) |
“Condensador con convertidor CC/CC”: unidad de (ultra) condensador para la acumulación de energía eléctrica combinada con una unidad CC/CC que adapta el nivel de tensión y controla la corriente hacia y desde la red del tablero de consumo eléctrico (sistema eléctrico). |
|
79) |
“Autobús articulado”: autobús pesado que es un vehículo incompleto, un vehículo completo o un vehículo completado compuesto por al menos dos secciones rígidas conectadas entre sí por una sección articulada. La conexión y la disyunción entre las secciones únicamente podrán realizarse en taller. En el caso de los autobuses pesados completos o completados de este tipo de vehículos, la sección articulada permitirá la libre circulación de viajeros entre las secciones rígidas. |
3. Descripción de la información de entrada pertinente de los accesorios en la herramienta de simulación
3.1. Ventilador de refrigeración del motor
La información sobre la tecnología del ventilador de refrigeración del motor se facilitará sobre la base de las combinaciones aplicables de tecnología de accionamiento y control del ventilador, tal como se describe en el cuadro 4.
Si una nueva tecnología dentro de un grupo de accionamiento de ventiladores (por ejemplo, montados en el cigüeñal) no puede encontrarse en la lista, se facilitará la tecnología asignándola a “por defecto en el grupo de accionamiento de ventiladores”.
Si una nueva tecnología no puede encontrarse en ningún grupo de accionamiento de ventiladores, se facilitará la tecnología asignándola a “total por defecto”.
Cuadro 4
Tecnologías del ventilador de refrigeración del motor (P181)
|
Grupo de accionamiento del ventilador |
Control del ventilador |
Camiones medios y pesados |
Autobuses pesados |
|
Montado en el cigüeñal |
Embrague viscoso con control electrónico |
X |
X |
|
Embrague viscoso con control bimetálico |
X (DC) |
X |
|
|
Embrague discontinuo |
X |
|
|
|
Embrague discontinuo (desconectado + 2 etapas) |
|
X |
|
|
Embrague discontinuo (desconectado + 3 etapas) |
|
X |
|
|
Embrague conectado/desconectado |
X |
X (DC, DO) |
|
|
Accionado mediante correa o mediante transmisión |
Embrague viscoso con control electrónico |
X |
X |
|
Embrague viscoso con control bimetálico |
X (DC) |
X |
|
|
Embrague discontinuo |
X |
|
|
|
Embrague discontinuo (desconectado + 2 etapas) |
|
X |
|
|
Embrague discontinuo (desconectado + 3 etapas) |
|
X |
|
|
Embrague conectado/desconectado |
X |
X (DC) |
|
|
Accionamiento hidráulico |
Bomba de desplazamiento variable |
X |
X |
|
Bomba de desplazamiento constante |
X (DC, DO) |
X (DC) |
|
|
Accionamiento eléctrico |
Control del motor eléctrico |
X (DC) |
X (DC) |
|
X: aplicable, DC: por defecto para el grupo de transmisión de ventiladores, DO: total por defecto |
3.2. Sistema de dirección
La tecnología del sistema de dirección se proporcionará de conformidad con el cuadro 5 para cada eje de dirección activo del vehículo.
Si una nueva tecnología dentro de un grupo de tecnologías de la dirección (por ejemplo, accionados mecánicamente) no puede encontrarse en la lista, se facilitará la tecnología asignándola a “por defecto en el grupo de tecnologías de la dirección”. Si una nueva tecnología no puede encontrarse en ningún grupo de tecnologías de la dirección, se facilitará la tecnología asignándola a “total por defecto”.
Cuadro 5
Tecnologías del sistema de dirección (P182)
|
Grupo de tecnologías de la dirección |
Tecnología |
Camiones medios y pesados |
Autobuses pesados |
|
Accionados mecánicamente |
Desplazamiento fijo |
X (DC, DO) |
X (DC, DO) |
|
Desplazamiento fijo, control electrónico |
X |
X |
|
|
Bomba de desplazamiento dual |
X |
X |
|
|
Bomba de desplazamiento dual con control electrónico |
X |
X |
|
|
Desplazamiento variable, control mecánico |
X |
X |
|
|
Desplazamiento variable, control electrónico |
X |
X |
|
|
Eléctricos |
Bomba de dirección eléctrica |
X (DC) |
X (DC) |
|
Dispositivo de dirección totalmente eléctrico |
X |
X |
|
|
X: aplicable, DC: por defecto para el grupo de tecnologías de la dirección, DO: total por defecto |
3.3. Sistema eléctrico
3.3.1. Camiones medios y camiones pesados
La tecnología del sistema eléctrico se facilitará de acuerdo con el
Cuadro 6.
Si la tecnología utilizada en el vehículo no figura en la lista, se facilitará “tecnología estándar” a la herramienta de simulación.
Cuadro 6
Tecnologías del sistema eléctrico para camiones medios y camiones pesados (P183)
|
Tecnología |
|
Tecnología estándar |
|
Tecnología estándar: faros LED |
3.3.2. Autobuses pesados
La tecnología del sistema eléctrico se facilitará de acuerdo con el cuadro 7.
Cuadro 7
Tecnologías del sistema eléctrico para autobuses pesados
|
Grupo del sistema eléctrico |
Parámetro |
ID del parámetro |
Entrada de la herramienta de simulación |
Explicaciones |
|
Alternador |
Alternator technology |
P294 |
conventional / smart / no alternator |
“smart” se declarará para los sistemas que cumplan las definiciones que figuran en el punto 2, subpunto 48; “no alternator” es aplicable a los VEH que no tienen alternador en el sistema eléctrico accesorio. En el caso de los VEP, no se requiere ningún dato. |
|
Smart alternator – maximum rated current |
P295 |
valor en [A] |
Corriente nominal máxima a velocidad nominal de acuerdo con el etiquetado o la ficha técnica del fabricante, o medida de acuerdo con la norma ISO 8854: 2012 Una entrada por cada alternador inteligente |
|
|
Smart alternator – rated voltage |
P296 |
valor en [V] |
Valores permitidos: “12”, “24”, “48” Una entrada por cada alternador inteligente |
|
|
Baterías para sistemas de alternadores inteligentes |
Technology |
P297 |
lead-acid battery – conventional / lead-acid battery – AGM / lead-acid battery – gel / li-ion battery - high power / li-ion battery - high energy |
Una entrada para cada batería cargada por el sistema con alternador inteligente Si no se puede encontrar una tecnología de baterías en la lista, se facilitará como entrada la tecnología “Lead-acid battery – Conventional”. |
|
Nominal voltage |
P298 |
valor en [V] |
Valores permitidos: “12”, “24”, “48” Una entrada para cada batería cargada por el sistema con alternador inteligente Cuando las baterías estén configuradas en serie (por ejemplo, dos unidades de 12 V para un sistema de 24 V), se proporcionará la tensión nominal real de las unidades individuales de batería (12 V en este ejemplo). |
|
|
Rated capacity |
P299 |
valor en [Ah] |
Capacidad en Ah de acuerdo con el etiquetado o la ficha técnica del fabricante Una entrada para cada batería cargada por el sistema con alternador inteligente |
|
|
Condensadores para sistemas de alternadores inteligentes |
Technology |
P300 |
with DC/DC converter |
Una entrada para cada batería cargada por el sistema con alternador inteligente |
|
Rated capacitance |
P301 |
valor en [F] |
Capacidad en faradios (F) de acuerdo con el etiquetado o la ficha técnica del fabricante Una entrada para cada condensador cargado por el sistema con alternador inteligente |
|
|
Rated voltage |
P302 |
valor en [V] |
Tensión nominal de operación de acuerdo con el etiquetado o la ficha técnica del fabricante Una entrada para cada condensador cargado por el sistema con alternador inteligente |
|
|
Suministro de energía eléctrica auxiliar |
Supply of electric auxiliaries from HEV REESS possible |
P303 |
true / false |
Debe ajustarse a “true” si el vehículo está equipado con un enlace de potencia controlado que permita la transferencia de energía eléctrica desde un sistema de almacenamiento de la energía de propulsión de VEH a la red del tablero de consumo eléctrico. La entrada solo es necesaria para los vehículos eléctricos híbridos. |
|
Luces interiores |
Interior lights LED |
P304 |
true / false |
Los parámetros solo se ajustarán a “true” si todas las luces de la categoría se ajustan a las definiciones establecidas en el punto 2, subpuntos 42 a 46. |
|
Luces para alumbrado exterior |
Day running lights LED |
P305 |
true / false |
|
|
Position lights LED |
P306 |
true / false |
||
|
Brake lights LED |
P307 |
true / false |
||
|
Headlights LED |
P308 |
true / false |
3.4. Sistema neumático
3.4.1. Sistemas neumáticos que funcionan con sobrepresión
3.4.1.1. Volumen de suministro de aire
En el caso de los sistemas neumáticos que funcionan con sobrepresión, el volumen de suministro de aire se indicará de conformidad con el cuadro 8.
Cuadro 8
Sistemas neumáticos con sobrepresión: volumen de suministro de aire
|
Volumen de suministro de aire |
Camiones medios y pesados (parte de P184) |
Autobuses pesados (P309) |
|
Cilindrada pequeña ≤ 250 cm3; 1 cilindro / 2 cilindros |
X |
X |
|
Cilindrada mediana, entre 250 y 500 cm3; 1 cilindro / 2 cilindros 1 fase |
X |
X |
|
Cilindrada mediana, entre 250 y 500 cm3; 1 cilindro / 2 cilindros 2 fases |
X |
X |
|
Cilindrada grande > 500 cm3; 1 cilindro / 2 cilindros 1 fase / 2 fases |
X, DO |
|
|
Cilindrada grande > 500 cm3; 1 fase |
|
X, DO |
|
Cilindrada grande > 500 cm3; 2 fase |
|
X |
En el caso de un compresor de dos fases, el volumen de la primera fase se utilizará para describir el tamaño del sistema de compresión del aire. En el caso de los compresores que no sean de pistón, se declarará la tecnología “total por defecto” (DO).
En el caso de autobuses pesados con compresores accionados eléctricamente, se facilitará “no aplicable” como dato de entrada para el volumen de suministro de aire, ya que la herramienta de simulación no tiene en cuenta este parámetro.
3.4.1.2. Tecnologías de ahorro de combustible
Las tecnologías de ahorro de combustible se facilitarán de acuerdo con las combinaciones que figuran en el cuadro 9 para los camiones medios y pesados, y de las del cuadro 10 en el caso de los autobuses pesados.
Cuadro 9
Sistemas neumáticos con sobrepresión: tecnologías de ahorro de combustible para camiones pesados, camiones medios (parte de P184)
|
N.o de combinación |
Accionamiento del compresor |
Embrague del compresor |
Compresor de aire con sistema de ahorro de energía (ESS) |
Sistema de gestión del aire con regeneración optimizada (AMS) |
|
1 |
mecánicamente |
no |
no |
no |
|
2 |
mecánicamente |
no |
sí |
no |
|
3 |
mecánicamente |
viscoso |
no |
no |
|
4 |
mecánicamente |
mecánicamente |
no |
no |
|
5 |
mecánicamente |
no |
sí |
sí |
|
6 |
mecánicamente |
viscoso |
no |
sí |
|
7 |
mecánicamente |
mecánicamente |
no |
sí |
|
8 |
eléctricamente |
no |
no |
no |
|
9 |
eléctricamente |
no |
no |
sí |
Cuadro 10
Sistemas neumáticos con sobrepresión: tecnologías de ahorro de combustible para autobuses pesados
|
N.o de combinación |
Accionamiento del compresor (P310) |
Embrague del compresor (P311) |
Sistema de regeneración inteligente (P312) |
Sistema de compresión inteligente (P313) |
|
1 |
mecánicamente |
no |
no |
no |
|
2 |
mecánicamente |
no |
sí |
no |
|
3 |
mecánicamente |
no |
no |
sí |
|
4 |
mecánicamente |
no |
sí |
sí |
|
5 |
mecánicamente |
viscoso |
no |
no |
|
6 |
mecánicamente |
viscoso |
sí |
no |
|
7 |
mecánicamente |
viscoso |
no |
sí |
|
8 |
mecánicamente |
viscoso |
sí |
sí |
|
9 |
mecánicamente |
mecánico |
no |
no |
|
10 |
mecánicamente |
mecánico |
sí |
no |
|
11 |
mecánicamente |
mecánico |
no |
sí |
|
12 |
mecánicamente |
mecánico |
sí |
sí |
|
13 |
eléctricamente |
no |
no |
no |
|
14 |
eléctricamente |
no |
sí |
no |
3.4.1.3. Características adicionales del sistema neumático para autobuses pesados
En el caso de los autobuses pesados, la información sobre las características adicionales del sistema neumático se facilitará de conformidad con el cuadro 11.
Cuadro 11
Características adicionales del sistema neumático para autobuses pesados
|
Parámetro |
ID del parámetro |
Entrada de la herramienta de simulación |
Explicaciones |
|
Ratio compressor to engine |
P314 |
valor en [-] |
Relación = velocidad del compresor / velocidad del motor. Aplicable únicamente en el caso de un compresor accionado mecánicamente. |
|
Entrance height in non-kneeled position |
P290 |
valor en [mm] |
De conformidad con las definiciones que figuran en el punto 2, subpunto 10, del anexo III. La documentación de este valor se proporcionará mediante dibujos de configuración del vehículo utilizados durante la parametrización del control de la suspensión neumática del vehículo. El valor representará el estado tal como se entrega al cliente como altura normal de circulación. Este parámetro solo es pertinente para los autobuses pesados. |
|
Air suspension control |
P315 |
mechanically / electronically |
|
|
Pneumatic SCR reagent dosing |
P316 |
true / false |
Véase el punto 2, subpunto 36 |
|
Door drive technology |
P291 |
pneumatic / mixed / electric |
|
3.4.2. Sistemas neumáticos que funcionan con vacío
En el caso de los vehículos con sistemas neumáticos que funcionen con vacío (presión negativa relativa), se facilitará como entrada de la herramienta de simulación (P184) “Vacuum pump” o “Vacuum pump + elec. driven”. Esta tecnología no será de aplicación para los autobuses pesados.
3.5. Sistema de calefacción, ventilación y aire acondicionado (HVAC)
3.5.1. Sistema HVAC para camiones medios y camiones pesados
La tecnología del sistema HVAC se facilitará de acuerdo con el cuadro 12.
Cuadro 12
Tecnologías del sistema HVAC para camiones medios y camiones pesados (P185)
|
Tecnología |
|
Ninguna (sin sistema de aire acondicionado para el compartimento del conductor) |
|
Por defecto |
3.5.2. Tecnologías del sistema HVAC para autobuses pesados
La configuración del sistema HVAC se facilitará de conformidad con las definiciones que figuran en el cuadro 13. La figura 2 ofrece una representación gráfica de las diferentes configuraciones.
Cuadro 13
Configuración del sistema HVAC para autobuses pesados (P317)
|
Configuración del sistema HVAC |
Sistema de confort térmico para el compartimento de pasajeros |
Número de bombas de calor para el compartimento de pasajeros de conformidad con el punto 2, subpunto 52 |
Compartimento del conductor alimentado por una o varias bombas de calor para el compartimento de pasajeros |
Bombas de calor independientes para el compartimento del conductor |
|
|
Rígido |
Articulado |
||||
|
1 |
No |
0 |
0 |
No |
No |
|
2 |
No |
0 |
0 |
No |
Sí |
|
3 |
Sí |
0 |
0 |
No |
No |
|
4 |
Sí |
0 |
0 |
No |
Sí |
|
5 |
Sí |
1 |
1 o 2 |
No |
No |
|
6 |
Sí |
1 |
1 o 2 |
Sí |
No |
|
7 |
Sí |
1 |
1 o 2 |
No |
Sí |
|
8 |
Sí |
> 1 |
> 2 |
No |
No |
|
9 |
Sí |
> 1 |
> 2 |
No |
Sí |
|
10 |
Sí |
> 1 |
> 2 |
Sí |
No |
Figura 2
Configuración del sistema HVAC para autobuses pesados (rígidos y articulados)
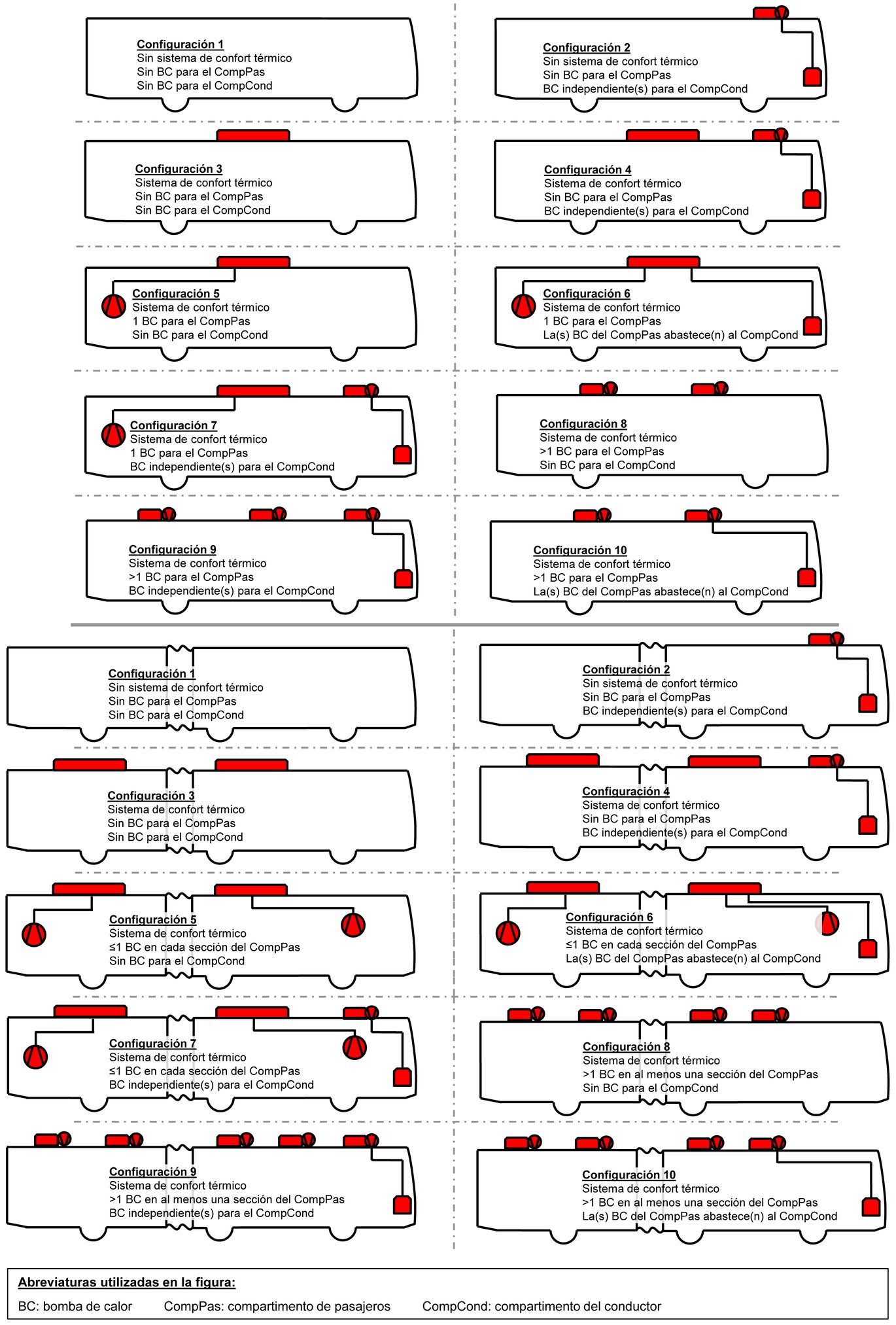
Los parámetros del sistema HVAC se declararán de conformidad con el cuadro 14.
Cuadro 14
Parámetros del sistema HVAC (autobuses pesados)
|
Parámetro |
ID del parámetro |
Entrada de la herramienta de simulación |
Explicaciones |
|
Heat pump type for cooling driver compartment |
P318 |
none / not applicable / R-744 / non R-744 2-stage / non R-744 3-stage / non R-744 4-stage / non R-744 continuous |
Se indicará “not applicable” para las configuraciones 6 y 10 del sistema HVAC debidas al suministro de la bomba de calor para pasajeros. |
|
Heat pump type for heating driver compartment |
P319 |
none / not applicable / R-744 / non R-744 2-stage / non R-744 3-stage / non R-744 4-stage / non R-744 continuous |
Se indicará “not applicable” para las configuraciones 6 y 10 del sistema HVAC debidas al suministro de la bomba de calor para pasajeros. |
|
Heat pump type for cooling passenger compartment |
P320 |
none / R-744 / non R-744 2-stage / non R-744 3-stage / non R-744 4-stage / non R-744 continuous |
En el caso de bombas de calor múltiples con diferentes tecnologías de refrigeración del compartimento de pasajeros, se declarará la tecnología predominante (por ejemplo, con arreglo a la potencia disponible o al uso preferido en funcionamiento). |
|
Heat pump type for heating passenger compartment |
P321 |
none / R-744 / non R-744 2-stage / non R-744 3-stage / non R-744 4-stage / non R-744 continuous |
En el caso de bombas de calor múltiples con diferentes tecnologías de calefacción del compartimento de pasajeros, se declarará la tecnología predominante (por ejemplo, con arreglo a la potencia disponible o al uso preferido en funcionamiento). |
|
Auxiliary heater power |
P322 |
valor en [W] |
Potencia nominal especificada para el dispositivo; Indíquese “0” si no se ha instalado ningún calefactor accesorio. |
|
Double glazing |
P323 |
true / false |
|
|
Adjustable coolant thermostat |
P324 |
true / false |
|
|
Adjustable auxiliary heater |
P325 |
true / false |
|
|
Engine waste gas heat exchanger |
P326 |
true / false |
|
|
Separate air distribution ducts |
P327 |
true / false |
|
|
Water electric heater |
P328 |
true / false |
Información que debe facilitarse únicamente para los VEH y los VEP |
|
Air electric heater |
P329 |
true / false |
Información que debe facilitarse únicamente para los VEH y los VEP |
|
Other heating technology |
P330 |
true / false |
Información que debe facilitarse únicamente para los VEH y los VEP |
3.6 Toma de fuerza de la transmisión (PTO)
En el caso de los camiones pesados con toma de fuerza PTO o mecanismo de accionamiento de la toma de fuerza PTO instalado en la transmisión, el consumo de potencia se tendrá en cuenta por medio de valores genéricos determinados. Estos valores representan las pérdidas de energía que se producen en modo de conducción habitual cuando el consumidor conectado a una toma de fuerza, por ejemplo una bomba hidráulica, está apagado/desembragado. Los consumos de energía relacionados con la aplicación cuando el consumidor está engranado serán añadidos por la herramienta de simulación y no se describen a continuación.
Cuadro 12
Demanda de potencia mecánica de las PTO con consumidores desconectados para camiones pesados
|
Variantes de concepción relativas a las pérdidas de potencia (en comparación con una transmisión sin PTO y/o mecanismo de tracción PTO) |
Pérdida de potencia |
|
|
Otras piezas afectadas por la pérdida de arrastre |
||
|
Árboles / ruedas motrices (P247) |
Otros elementos (P248) |
[W] |
|
solo una corona engranada situada encima del nivel de aceite especificado (sin engrane adicional) |
— |
0 |
|
solo el árbol de transmisión de la PTO |
embrague de dientes (incl. sincronizador) o corona desplazable |
50 |
|
solo el árbol de transmisión de la PTO |
embrague multidisco |
350 |
|
solo el árbol de transmisión de la PTO |
embrague multidisco con bomba específica para embrague PTO |
3 000 |
|
árbol de transmisión y/o hasta 2 coronas engranadas |
embrague de dientes (incl. sincronizador) o corona desplazable |
150 |
|
árbol de transmisión y/o hasta 2 coronas engranadas |
embrague multidisco |
400 |
|
árbol de transmisión y/o hasta 2 coronas engranadas |
embrague multidisco con bomba específica para embrague PTO |
3 050 |
|
árbol de transmisión y/o más de 2 coronas engranadas |
embrague de dientes (incl. sincronizador) o corona desplazable |
200 |
|
árbol de transmisión y/o más de 2 coronas engranadas |
embrague multidisco |
450 |
|
árbol de transmisión y/o más de 2 coronas engranadas |
embrague multidisco con bomba específica para embrague PTO |
3 100 |
|
PTO que incluye 1 o más engranes adicionales, sin embrague desconectado |
— |
1 500 |
En caso de que haya múltiples PTO instaladas para la transmisión, solo se declarará el componente con las pérdidas más elevadas de conformidad con el cuadro 12, para su combinación de criterios “PTOShaftsGearWheels” y “PTOShaftsOtherElements”. En el caso de los camiones medios y los autobuses pesados, no se prevé ninguna declaración de las PTO de transmisión.
(*1) Reglamento n.o 107 de la Comisión Económica para Europa de las Naciones Unidas (CEPE), sobre disposiciones uniformes relativas a la homologación de vehículos de la categoría M2 o M3 por lo que respecta a sus características generales de construcción (DO L 52 de 23.2.2018, p. 1).
(*2) Reglamento n.o 48 de la Comisión Económica para Europa de las Naciones Unidas (CEPE)-Disposiciones uniformes relativas a la homologación de vehículos en lo que respecta a la instalación de dispositivos de alumbrado y señalización luminosa (DO L 14 de 16.1.2019, p. 42).
(*3) Reglamento n.o 122 de la Comisión Económica de las Naciones Unidas para Europa (CEPE): Prescripciones técnicas uniformes relativas a la homologación de vehículos de las categorías M, N y O por lo que respecta a sus sistemas de calefacción (DO L 19 de 24.1.2020, p. 42).»
|
1) |
en el punto 2, el título se sustituye por el texto siguiente: «Definiciones A los efectos del presente anexo, además de las definiciones contempladas en los Reglamentos n.o 54 (1) y n.o 117 (2) de las Naciones Unidas, serán de aplicación las siguientes: (1) Reglamento n.o 54 de la Comisión Económica para Europa de las Naciones Unidas (CEPE): prescripciones uniformes relativas a la homologación de neumáticos para vehículos industriales y sus remolques (DO L 183 de 11.7.2008, p. 41)." (2) Reglamento n.o 117 de la Comisión Económica para Europa de las Naciones Unidas (CEPE): Disposiciones uniformes relativas a la homologación de neumáticos por lo que se refiere a las emisiones de ruido de rodadura, a la adherencia en superficie mojada y/o a la resistencia a la rodadura [2016/1350] (DO L 218 de 12.8.2016, p. 1).»" |
|
2) |
(no afecta a la versión española) |
|
3) |
en el punto 2, subpunto 3, la letra c) se sustituye por el texto siguiente:
|
|
4) |
en el punto 2, subpunto 3, letra f), el texto «CEPE» se sustituye por «Naciones Unidas»; |
|
5) |
en el punto 2, se inserta el punto siguiente:
(3) Reglamento (UE) 2020/740 del Parlamento Europeo y del Consejo, de 25 de mayo de 2020, relativo al etiquetado de los neumáticos en relación con la eficiencia en términos de consumo de carburante y otros parámetros, por el que se modifica el Reglamento (UE) 2017/1369 y se deroga el Reglamento (CE) n.o 1222/2009 (DO L 177 de 5.6.2020, p. 1).»;" |
|
6) |
en el punto 3.1, el texto «ISO/TS» se sustituye por «IATF»; |
|
7) |
el punto 3.2 se sustituye por el texto siguiente:
(4) Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo, de 13 de julio de 2009, relativo a los requisitos de homologación de tipo referentes a la seguridad general de los vehículos de motor, sus remolques y sistemas, componentes y unidades técnicas independientes a ellos destinados (DO L 200 de 31.7.2009, p. 1)." (5) Reglamento (UE) 2019/2144 del Parlamento Europeo y del Consejo, de 27 de noviembre de 2019, relativo a los requisitos de homologación de tipo de los vehículos de motor y de sus remolques, así como de los sistemas, componentes y unidades técnicas independientes destinados a esos vehículos, en lo que respecta a su seguridad general y a la protección de los ocupantes de los vehículos y de los usuarios vulnerables de la vía pública, por el que se modifica el Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo (DO L 325 de 16.12.2019, p. 1)»;" |
|
8) |
el punto 3.3 se sustituye por el texto siguiente:
|
|
9) |
el punto 3.4.1 se sustituye por el texto siguiente:
|
|
10) |
el punto 3.4.4 se sustituye por el texto siguiente: «De conformidad con el artículo 38, apartado 2, del Reglamento (UE) 2018/858, no se exigirá marca de homologación de tipo para los neumáticos certificados con arreglo al presente Reglamento.»; |
|
11) |
en el punto 4.2 se añade la frase siguiente: «Los ensayos deberán realizarse con neumáticos de ensayo nuevos en el sentido de la definición establecida en el punto 2 del Reglamento n.o 117 de las Naciones Unidas.»; |
|
12) |
en el punto 4.4.1, se suprime la última frase; |
|
13) |
el punto 4.4.2 se sustituye por el texto siguiente:
|
|
14) |
el punto 4.4.3 se sustituye por el texto siguiente:
|
|
15) |
en el punto 4.4.3, se añaden los puntos siguientes:
|
|
16) |
en el apéndice 1, punto 4, la letra c) se sustituye por el texto siguiente:
|
|
17) |
en el apéndice 1, el punto 7.2 se sustituye por el texto siguiente:
|
|
18) |
en el apéndice 2, sección I, el punto 0.2 se sustituye por el texto siguiente:
|
|
19) |
en el apéndice 2, sección I, el punto 0.4 se sustituye por el texto siguiente:
|
|
20) |
en el apéndice 2, sección I, el punto 0.5 se sustituye por el texto siguiente:
|
|
21) |
en el apéndice 2, sección I, el punto 0.11 se sustituye por el texto siguiente:
|
|
22) |
en el apéndice 2, sección I, se insertan los siguientes puntos:
(6) Reglamento n.o 30 de la Comisión económica para Europa de las Naciones Unidas (CEPE/ONU) — Disposiciones uniformes para la homologación de neumáticos para vehículos de motor y sus remolques (DO L 201 de 30.7.2008, p. 70). »;" |
|
23) |
en el apéndice 2, sección II, el punto 6.3 se sustituye por el texto siguiente:
|
|
24) |
en el apéndice 2, sección II, el punto 8.1 se sustituye por el texto siguiente:
|
|
25) |
en el apéndice 3, cuadro 1, novena fila, el texto de la primera columna se sustituye por el texto siguiente: «Tyre Size Designation»; |
|
26) |
en el apéndice 3, cuadro 1, se insertan las dos nuevas filas siguientes:
|
|
27) |
en el apéndice 4, el punto 1.1 se sustituye por el texto siguiente:
|
(1) Reglamento n.o 54 de la Comisión Económica para Europa de las Naciones Unidas (CEPE): prescripciones uniformes relativas a la homologación de neumáticos para vehículos industriales y sus remolques (DO L 183 de 11.7.2008, p. 41).
(2) Reglamento n.o 117 de la Comisión Económica para Europa de las Naciones Unidas (CEPE): Disposiciones uniformes relativas a la homologación de neumáticos por lo que se refiere a las emisiones de ruido de rodadura, a la adherencia en superficie mojada y/o a la resistencia a la rodadura [2016/1350] (DO L 218 de 12.8.2016, p. 1).»
(3) Reglamento (UE) 2020/740 del Parlamento Europeo y del Consejo, de 25 de mayo de 2020, relativo al etiquetado de los neumáticos en relación con la eficiencia en términos de consumo de carburante y otros parámetros, por el que se modifica el Reglamento (UE) 2017/1369 y se deroga el Reglamento (CE) n.o 1222/2009 (DO L 177 de 5.6.2020, p. 1).»;
(4) Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo, de 13 de julio de 2009, relativo a los requisitos de homologación de tipo referentes a la seguridad general de los vehículos de motor, sus remolques y sistemas, componentes y unidades técnicas independientes a ellos destinados (DO L 200 de 31.7.2009, p. 1).
(5) Reglamento (UE) 2019/2144 del Parlamento Europeo y del Consejo, de 27 de noviembre de 2019, relativo a los requisitos de homologación de tipo de los vehículos de motor y de sus remolques, así como de los sistemas, componentes y unidades técnicas independientes destinados a esos vehículos, en lo que respecta a su seguridad general y a la protección de los ocupantes de los vehículos y de los usuarios vulnerables de la vía pública, por el que se modifica el Reglamento (UE) 2018/858 del Parlamento Europeo y del Consejo (DO L 325 de 16.12.2019, p. 1)»;
(6) Reglamento n.o 30 de la Comisión económica para Europa de las Naciones Unidas (CEPE/ONU) — Disposiciones uniformes para la homologación de neumáticos para vehículos de motor y sus remolques (DO L 201 de 30.7.2008, p. 70). »;»
CONFORMIDAD DE LA UTILIZACIÓN DE LA HERRAMIENTA DE SIMULACIÓN Y DE LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE LOS COMPONENTES, LAS UNIDADES TÉCNICAS INDEPENDIENTES Y LOS SISTEMAS: PROCEDIMIENTO DE ENSAYO DE VERIFICACIÓN
1. Introducción
El presente anexo establece los requisitos del procedimiento de ensayo de verificación, que es el procedimiento de ensayo destinado a verificar las emisiones de CO2 de los camiones medios y pesados nuevos.
El procedimiento de ensayo de verificación consiste en un ensayo en carretera cuyo fin es verificar las emisiones de CO2 de los vehículos nuevos tras su fabricación. Deberá llevarlo a cabo el fabricante de vehículos y deberá supervisarlo la autoridad de homologación que concedió la licencia para utilizar la herramienta de simulación.
Durante el procedimiento de ensayo de verificación deberán medirse el par y la velocidad en las ruedas motrices, la velocidad del motor, el consumo de combustible, la marcha engranada del vehículo y los demás parámetros pertinentes enumerados en el punto 6.1.6. Los datos medidos alimentarán la herramienta de simulación, que utiliza los datos de entrada relacionados con el vehículo y la información de entrada procedente de la determinación de las emisiones de CO2 y el consumo de combustible del vehículo. Para la simulación del procedimiento de ensayo de verificación, se utilizarán como datos de entrada el par de rueda medido instantáneamente y la velocidad de giro de las ruedas, así como la velocidad del motor. Para superar el procedimiento de ensayo de verificación, las emisiones de CO2 calculadas a partir del consumo de combustible deberán estar dentro de los márgenes de tolerancia establecidos en el punto 7 en comparación con las emisiones de CO2 procedentes de la simulación del procedimiento de ensayo de verificación. La figura 1 ofrece una imagen esquemática del método utilizado en el procedimiento de ensayo de verificación. Las etapas de evaluación realizadas por la herramienta de simulación en el procedimiento de ensayo de verificación se describen en el apéndice 1 del presente anexo.
En el marco del procedimiento de ensayo de verificación, también se comprobará la exactitud del conjunto de datos de entrada del vehículo procedentes de la certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas, con el fin de controlar los datos y el proceso de tratamiento de los estos. La exactitud de los datos de entrada relativos a los componentes, las unidades técnicas independientes y los sistemas pertinentes para la resistencia aerodinámica y la resistencia a la rodadura del vehículo se verificará de conformidad con el punto 6.1.1.
Figura 1
Esquema del método utilizado en el procedimiento de ensayo de verificación
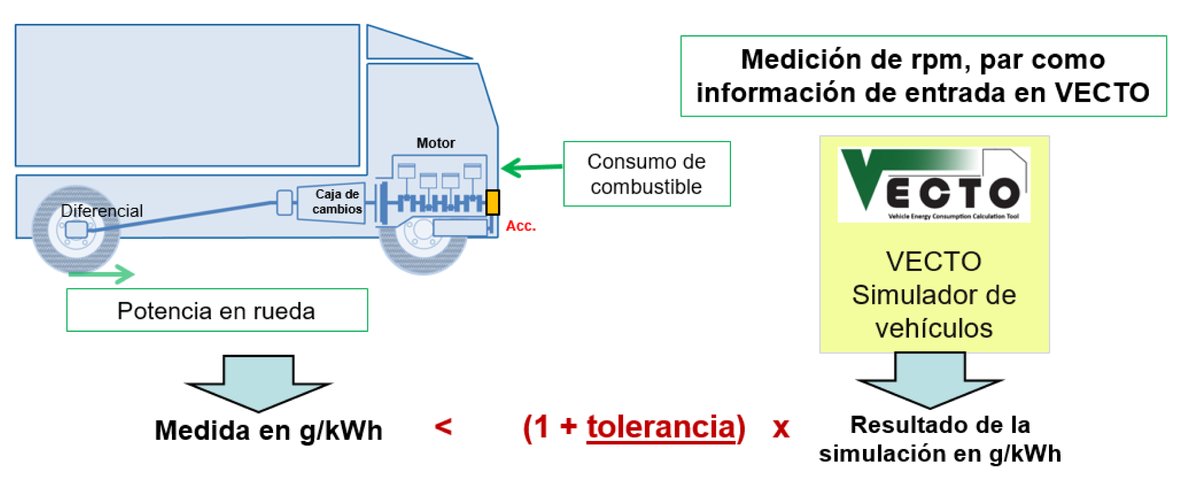
2. Definiciones
A los efectos del presente anexo se aplicarán las siguientes definiciones:
1) | “conjunto de datos pertinentes para el ensayo de verificación”: conjunto formado por los datos de entrada relativos a los componentes, las unidades técnicas independientes y los sistemas y la información de entrada utilizada para determinar el CO2 de un vehículo pertinente para el procedimiento de ensayo de verificación; |
2) | “vehículo pertinente para el procedimiento de ensayo de verificación”: vehículo nuevo para el que se ha determinado y declarado un valor de emisiones de CO2 y de consumo de combustible de conformidad con el artículo 9; |
3) | “masa real del vehículo corregida”: masa real del vehículo corregida, de conformidad con el punto 2, subpunto 4, del anexo III; |
4) | “masa real del vehículo para el VTP”: la masa real del vehículo tal como se define en el artículo 2, punto 6, del Reglamento (UE) n.o 1230/2012, pero con un depósito lleno, más el equipo de medición adicional establecido en el punto 5 (equipo de medición), más la masa real del remolque o semirremolque si así lo requiere el punto 6.1.4.1; |
5) | “masa real del vehículo para el VTP con carga útil”: la masa real del vehículo para el VTP con la carga útil aplicada en el procedimiento de ensayo de verificación tal como se establece en el punto 6.1.4.2; |
6) | “potencia en rueda”: potencia total en las ruedas motrices de un vehículo para superar todas las resistencias en conducción de la rueda, calculada en la herramienta de simulación a partir del par medido y la velocidad de giro de las ruedas motrices; |
7) | “señal de la red de zona del controlador” o “señal CAN”: señal procedente de la conexión con la unidad de control electrónico del vehículo que se menciona en el punto 2.1.5 del apéndice 1 del anexo II del Reglamento (UE) n.o 582/2011; |
8) | “conducción urbana”: distancia total recorrida durante la medición del consumo de combustible a velocidades que no superen los 50 km/h; |
9) | “conducción rural”: distancia total recorrida durante la medición del consumo de combustible a velocidades que superan los 50 km/h, pero no los 70 km/h; |
10) | “conducción en autopista”: distancia total recorrida durante la medición del consumo de combustible a velocidades superiores a 70 km/h; |
11) | “diafonía”: señal en la salida principal de un sensor (My), producida por un mensurando (Fz) que actúa sobre el sensor, diferente del mensurando asignado a dicha salida. la asignación del sistema de coordenadas se define de conformidad con la norma ISO 4130. |
3. Selección de vehículos
El número de vehículos nuevos que debe ensayarse por año de fabricación garantiza que el procedimiento de ensayo de verificación cubra las variantes pertinentes de los componentes, las unidades técnicas independientes y los sistemas utilizados. La selección de vehículos para el ensayo de verificación deberá basarse en los requisitos siguientes:
a) | Los vehículos destinados al ensayo de verificación se seleccionarán entre los vehículos procedentes de la cadena de producción para los que se haya determinado y declarado un valor de emisiones de CO2 y de consumo de combustible de conformidad con el artículo 9. Los componentes, las unidades técnicas independientes y los sistemas instalados en el vehículo procederán de la producción en serie y corresponderán a los instalados en la fecha de fabricación del vehículo. |
b) | La selección del vehículo correrá a cargo de la autoridad de homologación que concedió la licencia para utilizar la herramienta de simulación, sobre la base de las propuestas del fabricante de vehículos. |
c) | Solo se seleccionarán para el ensayo de verificación vehículos con un eje motor. |
d) | Se recomienda incluir en cada ensayo de verificación conjuntos de datos pertinentes de los componentes de interés y con el mayor número de ventas por fabricante. Los componentes, las unidades técnicas independientes o los sistemas podrán verificarse todos en un vehículo o en vehículos diferentes. Aparte del criterio del mayor número de ventas, la autoridad de homologación mencionada en la letra b) decidirá si en el ensayo de verificación deben incluirse otros vehículos con conjuntos de datos relevantes relativos al motor, el eje y la transmisión. |
e) | A efectos del ensayo de verificación, no se seleccionarán vehículos que utilicen valores normalizados para la certificación respecto del CO2 de sus componentes, unidades técnicas independientes o sistemas en lugar de los valores medidos para las pérdidas de la transmisión y de los ejes mientras se fabriquen vehículos que cumplan los requisitos de las letras a) a c) y que utilicen mapas de pérdida en relación con esos componentes, unidades técnicas independientes o sistemas en la certificación respecto del CO2. |
f) | El número mínimo de vehículos diferentes con combinaciones diferentes de conjuntos de datos pertinentes para el ensayo de verificación que debe someterse a este ensayo cada año se basará en las ventas del fabricante de vehículos según se establece en el cuadro 1. Cuadro 1 Determinación del número mínimo de vehículos que debe someter a ensayo el fabricante de vehículos
|
g) | El fabricante de vehículos finalizará el ensayo de verificación en un plazo de diez meses a partir de la fecha de selección del vehículo para el ensayo de verificación. |
4. Condiciones del vehículo
Cada vehículo para el ensayo de verificación deberá encontrarse en una situación similar a la prevista para su introducción en el mercado. No está permitido ningún cambio en el hardware, como los lubricantes, ni en el software, como los controladores auxiliares. Los neumáticos podrán sustituirse por neumáticos de medición de tamaño similar (± 10 %).
Serán de aplicación las disposiciones establecidas en los puntos 3.3 a 3.6 del anexo II del Reglamento (UE) n.o 582/2011.
4.1 Rodaje del vehículo
No es obligatorio el rodaje del vehículo. Si el kilometraje total del vehículo de ensayo es inferior a 15 000 km, la herramienta de simulación aplicará un coeficiente de evolución, como se define en el apéndice 1, para el resultado del ensayo. El total de kilómetros del vehículo de ensayo será el que indique el cuentakilómetros al inicio de la medición del consumo de combustible. El kilometraje máximo al inicio del calentamiento será de 20 000 km.
4.2 Combustible y lubricantes
Todos los lubricantes serán los mismos que los utilizados para la introducción del vehículo en el mercado.
Para la medición del consumo de combustible descrita en el punto 6.1.5, el combustible utilizado será el disponible en el mercado. En caso de litigio, el combustible será el combustible de referencia adecuado especificado en el anexo IX del Reglamento (UE) n.o 582/2011.
El depósito de combustible estará lleno al inicio del calentamiento del vehículo. No está permitido el repostaje del vehículo entre el inicio del calentamiento y el final de la medición del consumo de combustible.
El poder calorífico neto (NCV) del combustible utilizado en el ensayo de verificación se determinará de conformidad con el punto 3.2 del anexo V. El lote de combustible se tomará del depósito tras el calentamiento del vehículo. En el caso de los motores de combustible dual, este procedimiento se aplicará a ambos combustibles.
5. Equipo de medición
Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma IATF 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración y la verificación deberán ajustarse a normas nacionales o internacionales.
5.1 Par de las ruedas
El par directo en todos los ejes motores se medirá mediante uno de los siguientes sistemas de medición, cumpliendo los requisitos que figuran en el cuadro 2:
a) | medidor del par de cubo |
b) | medidor del par de llanta |
c) | medidor del par de semieje |
La desviación se medirá durante el ensayo de verificación mediante la puesta a cero del sistema de medición del par de conformidad con el punto 6.1.5.4 después del calentamiento del vehículo de conformidad con el punto 6.1.5.3, levantando el eje y midiendo de nuevo el par en el eje levantado inmediatamente después del ensayo de verificación, de conformidad con el punto 6.1.5.6.
Para obtener un resultado de ensayo válido, deberá demostrarse una desviación máxima (suma de los valores absolutos de ambas ruedas) del sistema de medición del par durante el procedimiento de ensayo de verificación del 1,5 % del intervalo calibrado de un medidor de par único.
5.2 Velocidad del vehículo
La velocidad registrada del vehículo se basará en la señal CAN.
5.3 Marcha engranada
En el caso de los vehículos con transmisiones SMT y AMT, la marcha engranada se calcula mediante la herramienta de simulación a partir de la velocidad medida del motor, la velocidad del vehículo, las dimensiones de los neumáticos y las relaciones de transmisión del vehículo de conformidad con el apéndice 1. La herramienta de simulación obtiene la velocidad del motor a partir de los datos de entrada con arreglo al punto 5.4.
En el caso de los vehículos con transmisión APT, la marcha engranada, así como el estado del convertidor de par (activo o no activo) se proporcionarán a partir de las señales CAN.
5.4 Velocidad de giro del motor
La velocidad de giro del motor se registrará a partir de los sistemas de medición CAN, OBD o de sistemas alternativos que cumplan los requisitos establecidos en el cuadro 2.
5.5 Velocidad de giro de las ruedas del eje motor
La velocidad de giro de las ruedas a la izquierda y a la derecha del eje motor se registrará a partir de los sistemas de medición CAN, OBD o de sistemas alternativos que cumplan los requisitos establecidos en el cuadro 2.
5.6 Velocidad de giro del ventilador
En el caso de los ventiladores de refrigeración del motor no accionados eléctricamente, se registrará la velocidad de giro del ventilador. A tal efecto, se utilizará la señal CAN o bien un sensor externo que cumpla los requisitos establecidos en el cuadro 2.
En el caso de los ventiladores de refrigeración del motor accionados eléctricamente, se registrarán la corriente y la tensión de la entrada de corriente continua en el borne del motor eléctrico o el inversor. A partir de estas dos señales, la potencia eléctrica en el borne se calculará multiplicando y estará disponible como señal de resolución temporal en tanto que entrada de la herramienta de simulación. En el caso de múltiples ventiladores de refrigeración del motor accionados eléctricamente, se pondrá a disposición la suma de la potencia eléctrica en los bornes.
5.7 Sistema de medición del combustible
El combustible consumido se medirá a bordo con un dispositivo de medición basado en uno de los métodos de medición siguientes:
— | Medición de la masa de combustible. El dispositivo de medición del combustible cumplirá los requisitos de exactitud establecidos en el cuadro 2 para el sistema de medición de la masa de combustible. |
— | Medición del volumen de combustible junto con la corrección de su expansión térmica. El dispositivo de medición del volumen de combustible y el dispositivo de medición de la temperatura del combustible cumplirán los requisitos de exactitud establecidos en el cuadro 2 para el sistema de medición del volumen de combustible. Los valores medidos del flujo volumétrico de combustible se convertirán en flujo másico de combustible de acuerdo con las ecuaciones siguientes: |
mfuel,i = Vfuel,i·ρi
donde:
mfuel, i | = | flujo másico de combustible en la muestra i [g/h] |
ρ0 | = | densidad del combustible utilizado para el ensayo de verificación en (g/dm3). La densidad se determinará de conformidad con el anexo IX del Reglamento (UE) n.o 582/2011. Si el combustible utilizado en el ensayo de verificación es gasóleo, también podrá utilizarse el valor medio del intervalo de densidad de los combustibles de referencia B7 de conformidad con el anexo IX del Reglamento (UE) n.o 582/2011. |
t0 | = | temperatura del combustible que se corresponde con la densidad ρ0 para el combustible de referencia [°C] |
ρi | = | densidad del combustible de ensayo en la muestra i [g/dm3] |
Vfuel, i | = | flujo volumétrico de combustible en la muestra i [dm3/h] |
ti | = | temperatura del combustible medida en la muestra i [°C] |
β | = | factor de corrección de la temperatura (0,001 K–1). |
En el caso de los vehículos de combustible dual, el flujo de combustible se medirá por separado para cada uno de los dos combustibles.
5.8 Masa del vehículo
Las siguientes masas del vehículo se medirán con un equipo que cumpla los requisitos establecidos en el cuadro 2:
a) | masa real del vehículo para el procedimiento de ensayo de verificación; |
b) | masa real del vehículo para el procedimiento de ensayo de verificación con carga útil. |
5.9 Requisitos generales para las mediciones a bordo especificadas en los puntos 5.1 a 5.8
Los datos de entrada establecidos en el punto 6.1.6. El cuadro 4 se completará a partir de las mediciones. Todos los datos deberán registrarse al menos en una frecuencia de 2 Hz o en una frecuencia recomendada por el fabricante del equipo, si es más elevada.
Los datos de entrada de la herramienta de simulación podrán proceder de diferentes registros. El par y la velocidad de giro en las ruedas se registrarán en un sistema de registro de datos. Si se utilizan diferentes sistemas de registro de datos para las demás señales, se registrará una señal común, como la velocidad del vehículo, para garantizar la alineación temporal correcta de las señales. La alineación temporal de las señales dará lugar al coeficiente de correlación más alto de la señal común registrada con los distintos registradores de datos.
Todos los equipos de medición utilizados deberán cumplir los requisitos de exactitud establecidos en el cuadro 2. Los equipos que no figuren en el cuadro 2 deberán cumplir los requisitos de exactitud establecidos en el cuadro 2 del anexo V.
Cuadro 2
Requisitos de los sistemas de medición
Sistema de medición | Exactitud | Tiempo de subida (1) | ||||||||
Báscula para pesar el vehículo | 50 kg o < 0,5 % de la calibración máxima el que sea menor | — | ||||||||
Velocidad de giro de las ruedas | < 0,5 % de la lectura a 80 km/h | ≤ 1 s | ||||||||
Flujo másico de combustible en el caso de combustibles líquidos (2) | < 1,0 % de la lectura o < 0,2 % de la calibración máxima lo que sea mayor | — | ||||||||
Flujo másico de combustible en el caso de combustibles gaseosos (2) | < 1,0 % de la lectura o < 0,5 % de la calibración máxima lo que sea mayor | — | ||||||||
Sistema de medición del volumen de combustible (2) | < 1,0 % de la lectura o < 0,5 % de la calibración máxima lo que sea mayor | — | ||||||||
Temperatura del combustible | ± 1 °C | ≤ 2 s | ||||||||
Sensor para medir la velocidad de giro del ventilador de refrigeración | < 0,4 % de la lectura o < 0,2 % de la calibración máxima de la velocidad, si este valor es mayor | ≤ 1 s | ||||||||
Tensión | < 2 % de la lectura o < 1 % de la calibración máxima de la velocidad, si este valor es mayor | ≤ 1 s | ||||||||
Corriente | < 2 % de la lectura o < 1 % de la calibración máxima de la velocidad, si este valor es mayor | ≤ 1 s | ||||||||
Velocidad del motor | Con arreglo al anexo V. En el caso de los vehículos con función de parada-arranque del motor, se verificará que la velocidad del motor también se registra correctamente para velocidades inferiores al ralentí. | |||||||||
Par de las ruedas | Para una calibración de 10 kNm (en todo el intervalo de calibración):
| < 0,1 s |
Los valores máximos de calibración serán los valores máximos previstos durante todas las rondas de ensayo del sistema de medición respectivo, multiplicados por un factor arbitrario superior a 1 e inferior o igual a 2. Para el sistema de medición del par, la calibración máxima podrá limitarse a 10 kNm.
En el caso de los motores de combustible dual, el valor máximo de calibración del sistema de medición para el caudal másico de combustible o el volumen de combustible se determinará con arreglo a los requisitos establecidos en el punto 3.5 del anexo V. En el caso del volumen de combustible, el valor máximo de calibración se determinará dividiendo los valores máximos de calibración para el flujo másico de combustible por el valor de densidad ρ0 definido de acuerdo con el punto 5.7.
En caso de que se utilice más de una escala, la suma de todas las exactitudes deberá cumplir la exactitud dada.
5.10. Par motor
El par motor se registrará durante el procedimiento de ensayo de verificación con el fin de evaluar las emisiones contaminantes. La señal deberá cumplir las disposiciones especificadas para la señal del par motor en el anexo II, apéndice 1, punto 2.2, cuadro 1, del Reglamento (UE) n.o 582/2011.
5.11. Emisiones contaminantes
Para la medición de las emisiones contaminantes se utilizarán los instrumentos y procedimientos establecidos en los apéndices 1 a 4 del anexo II del Reglamento (UE) n.o 582/2011. La evaluación de los datos proporcionará los flujos másicos instantáneos de emisiones tal como se establece en el cuadro 4 del punto 6.1.6 como entrada de la herramienta de simulación.
Sobre la base de estas señales de entrada, la herramienta de simulación calcula automáticamente las emisiones contaminantes específicas del freno medidas en el ensayo de verificación (BSEM), tal como se establece en la parte B del apéndice 1 del presente anexo. A continuación, estos resultados se trascriben automáticamente en la salida de la herramienta de simulación con arreglo al punto 8.13.14. No se aplicarán los requisitos adicionales establecidos en el Reglamento (UE) n.o 582/2011 sobre evaluación de datos (por ejemplo, ventanas de trabajo, ventanas de medias móviles), inicio del ensayo y trayecto.
En el procedimiento de ensayo de verificación, no se aplicarán los criterios de superación / no superación relativos a las emisiones contaminantes.
6. Procedimiento de ensayo
6.1 Preparación del vehículo
El vehículo procederá de la producción en serie y se seleccionará con arreglo a lo establecido en el punto 3.
6.1.1 Verificación de la información de entrada y de los datos de entrada y tratamiento de los datos
El archivo de registros del fabricante y el archivo de información del cliente del vehículo seleccionado se utilizarán como base para verificar los datos de entrada. El número de identificación del vehículo seleccionado será el mismo que el número de identificación del vehículo que figure en el archivo de registros del fabricante y en el archivo de información del cliente.
A petición de la autoridad de homologación que concedió la licencia para utilizar la herramienta de simulación, el fabricante de vehículos proporcionará, en el plazo de quince días hábiles, el archivo de registros del fabricante, la información de entrada y los datos de entrada necesarios para el funcionamiento de la herramienta de simulación, así como el certificado de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de todos los componentes, las unidades técnicas independientes y los sistemas pertinentes.
6.1.1.1. Verificación de los componentes, las unidades técnicas independientes y los sistemas, así como de los datos de entrada y la información de entrada
En relación con los componentes, las unidades técnicas independientes y los sistemas instalados en el vehículo, se realizarán los controles siguientes:
a) | Integridad de los datos de la herramienta de simulación: la integridad del hash criptográfico del archivo de registros del fabricante, contemplado en el artículo 9, apartado 3, y recalculado durante el procedimiento de ensayo de verificación con la herramienta de hashing, se verificará mediante comparación con el hash criptográfico que figura en el certificado de conformidad. |
b) | Datos del vehículo: el número de identificación del vehículo, la configuración de los ejes, los accesorios seleccionados y la tecnología de toma de fuerza, los engranajes desactivados de conformidad con el punto 6.2 del anexo III y los requisitos sobre dispositivos aerodinámicos activos establecidos en el punto 3.3.1.5 del anexo VIII deberán coincidir con los del vehículo seleccionado. |
c) | Las limitaciones del par del motor declaradas en la entrada de la herramienta de simulación están sujetas a una verificación en el procedimiento de ensayo de verificación si se declaran para una marcha que se encuentra entre el 50 % de las más elevadas (por ejemplo, para cualquiera de las marchas 7 a 12 de una transmisión de 12 marchas) y si debe ser de aplicación uno de los siguientes casos:
En el caso de cualquiera de los límites de par sujetos a una verificación, se demostrará que el percentil 99 del par motor registrado durante la medición del consumo de combustible en la marcha pertinente no supera el límite de par declarado en más de un 5 %. A tal efecto, el ensayo de verificación abarcará fases a todo gas en las marchas respectivas. La verificación se llevará a cabo sobre la base del par motor registrado, tal como se establece en el punto 5.10. La verificación de la limitación del par motor también podrá realizarse únicamente como ensayo independiente, consistente en aceleraciones específicas a plena carga y sin ninguna otra obligación de evaluación del ensayo. |
d) | Datos del componente, la unidad técnica independiente y los sistemas: el número de certificación y el tipo de modelo impresos en el certificado de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible corresponderán al componente, la unidad técnica independiente y el sistema instalados en el vehículo seleccionado. |
e) | El hash de los datos de entrada y la información de entrada de la herramienta de simulación coincidirá con el hash impreso en el certificado de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas siguientes:
|
6.1.1.2 Verificación de la masa del vehículo
Si así lo solicita la autoridad de homologación que concedió la licencia para utilizar la herramienta de simulación, la determinación de las masas por el fabricante se verificará de conformidad con el anexo I, apéndice 2, punto 2, del Reglamento (UE) n.o 1230/2012. Si la verificación no es satisfactoria, se determinará la masa real corregida, tal como se define en el punto 2, subpunto 4, del anexo III del presente Reglamento.
6.1.1.3 Acciones necesarias
En caso de que existan discrepancias en cuanto al número de certificación o al hash criptográfico de uno o varios archivos relativos a los componentes, las unidades técnicas independientes o los sistemas enumerados en el punto 6.1.1.1, letra e), subpuntos 1 a 8, los datos incorrectos serán sustituidos para todas las demás acciones por el archivo de datos de entrada correctos que supere los controles establecidos en los puntos 6.1.1.1 y 6.1.1.2. Lo mismo se aplica a cualquier otra información incorrecta detectada correspondiente al punto 6.1.1.1, letras b) y c).
Si la verificación de los resultados en el archivo de registros del fabricante y el archivo de información del cliente falla o no se dispone de ningún conjunto completo de datos de entrada con los certificados correctos de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible para los componentes, las unidades técnicas independientes o los sistemas enumerados en el punto 6.1.1.1, letra e), subpuntos 1 a 8, el ensayo de verificación finalizará y el vehículo no superará el procedimiento de ensayo de verificación.
6.1.2 Fase de rodaje
Podrá realizarse una fase de rodaje hasta un máximo de 15 000 km de lectura del cuentakilómetros. En caso de que alguno de los componentes, las unidades técnicas independientes o los sistemas enumerados en el punto 6.1.1.1 esté dañado, podrá ser sustituido por un componente, una unidad técnica independiente o un sistema equivalente con el mismo número de certificación. La sustitución se documentará en el acta de ensayo.
Antes de las mediciones, se comprobarán todos los componentes, las unidades técnicas independientes y los sistemas pertinentes, a fin de excluir condiciones inusuales, como niveles de aceite incorrectos, filtros de aire obstruidos o alertas de diagnóstico a bordo.
6.1.3 Configuración del equipo de medición
Todos los sistemas de medición se calibrarán de conformidad con las disposiciones del fabricante del equipo. Si no existen disposiciones, la calibración se hará siguiendo las recomendaciones del fabricante del equipo.
Tras la fase de rodaje, se instalarán en el vehículo los sistemas de medición con arreglo a lo establecido en el punto 5.
6.1.4 Configuración del vehículo de ensayo para la medición del consumo de combustible
6.1.4.1 Configuración del vehículo
Los tractocamiones de los grupos de vehículos definidos en los cuadros 1 y 2 del anexo I se someterán a ensayo con cualquier tipo de semirremolque, siempre y cuando pueda aplicarse la carga útil definida más abajo.
Los camiones rígidos de los grupos de vehículos definidos en los cuadros 1 y 2 del anexo I se someterán a ensayo con remolque, si van equipados de un enganche para remolques. Podrá aplicarse cualquier tipo de carrocería u otro dispositivo para llevar la carga útil establecida en el punto 6.1.4.2. Las carrocerías de los camiones rígidos podrán diferir de las carrocerías estándar que figuran en el anexo VIII, apéndice 4, punto 2.
Las furgonetas de los grupos de vehículos definidos en el cuadro 2 del anexo I se someterán a ensayo con la carrocería final del vehículo completo o completado.
6.1.4.2 Carga útil del vehículo
En el caso de los camiones pesados del grupo 4 y los grupos superiores, la carga útil del vehículo se fijará como mínimo en una masa que dé lugar a un peso total de ensayo del 90 % del peso máximo autorizado de conformidad con la Directiva 96/53/CE (*) para el vehículo o la combinación de vehículos específicos.
En el caso de los camiones pesados de los grupos 1s, 1, 2 y 3, y de los camiones medios, la carga útil se situará entre el 55 % y el 75 % del peso máximo autorizado de conformidad con la Directiva 96/53/CE para el vehículo o la combinación de vehículos específicos.
6.1.4.3 Presión de inflado del neumático
La presión de inflado del neumático se ajustará a la recomendación del fabricante con una desviación máxima inferior al 10 %. Los neumáticos del semirremolque podrán diferir de los neumáticos estándar establecidos en el cuadro 2 de la parte B del anexo II del Reglamento (CE) n.o 661/2009 para la certificación de los neumáticos respecto del CO2.
6.1.4.4 Ajustes para accesorios
Todos los parámetros que influyan en la demanda de energía auxiliar se ajustarán al consumo de energía mínimo razonable, cuando proceda. Se apagará el aire acondicionado y la ventilación de la cabina se fijará por debajo del flujo de masa medio. Se apagarán los consumidores de energía adicional que no sean necesarios para el funcionamiento del vehículo. Los dispositivos externos para suministrar energía a bordo, como las baterías externas, solo se permitirán para el funcionamiento del equipo de medición adicional para el procedimiento de ensayo de verificación que figura en el cuadro 2, pero no suministrarán energía al equipo del vehículo que esté presente al introducir el vehículo en el mercado.
6.1.4.5 Regeneración del filtro de partículas
Si procede una regeneración del filtro de partículas, esta deberá iniciarse antes del ensayo de verificación. Será de aplicación el anexo II, punto 4.6.10, del Reglamento (UE) n.o 582/2011.
6.1.5 Ensayo de verificación
6.1.5.1 Selección de la ruta
La ruta seleccionada para el ensayo de verificación deberá cumplir los requisitos establecidos en el cuadro 3. Las rutas podrán incluir pistas públicas y privadas.
6.1.5.2 Preacondicionamiento del vehículo
No se permitirá un preacondicionamiento distinto del previsto en el punto 6.1.5.3.
6.1.5.3 Calentamiento del vehículo
Antes de iniciarse la medición del consumo de combustible, deberá conducirse el vehículo para su calentamiento con arreglo a lo establecido en el cuadro 3. La fase de calentamiento no se tendrá en cuenta en la evaluación del ensayo de verificación.
Antes de iniciar el calentamiento, los analizadores PEMS se comprobarán y calibrarán de conformidad con los procedimientos establecidos en el anexo II, apéndice 1, del Reglamento (UE) n.o 582/2011.
6.1.5.4 Puesta a cero del equipo de medición del par
La puesta a cero de los medidores de par se realizará como sigue:
— | se llevará el vehículo al lugar de parada; |
— | se levantarán del suelo las ruedas con el instrumental de medición, de manera que las ruedas puedan girar libremente y no se aplique par externo alguno al sensor de par; |
— | se pondrá a cero el amplificador de lectura de los medidores del par; la puesta a cero se completará en menos de 20 minutos. |
6.1.5.5 Medición del consumo de combustible y registro de las señales de emisiones contaminantes
La medición del consumo de combustible empezará inmediatamente después de la puesta a cero del equipo de medición del par de las ruedas con el vehículo parado. Durante la medición, se conducirá el vehículo evitando frenar o pisar el acelerador innecesariamente y girar de manera brusca. Se activarán los sistemas avanzados de asistencia al conductor que funcionan automáticamente al utilizar la llave, el sistema automatizado realizará los cambios de marcha (en el caso de las transmisiones AMT o APT) y se utilizará el control de crucero (si procede). La duración de la medición del consumo de combustible se situará dentro de las tolerancias establecidas en el cuadro 3. La medición del consumo de combustible también finalizará con el vehículo parado inmediatamente antes de medir la desviación del equipo de medición del par.
El registro de las señales pertinentes para la evaluación de las emisiones contaminantes comenzará a más tardar una vez que se haya iniciado la medición del consumo de combustible y finalizará junto con esta.
Como entrada de la herramienta de simulación, se facilitará toda la secuencia de ensayo, desde la última etapa de tiempo de 0,5 s de la fase de parada tras la puesta a cero de los medidores de par hasta la primera etapa de tiempo de 0,5 s de la fase final de parada.
6.1.5.6 Medición de la desviación del equipo de medición del par
Inmediatamente después de la medición del consumo de combustible, se registrará la desviación del equipo de medición del par midiendo el par con el vehículo en las mismas condiciones que durante el proceso de puesta a cero. Si la medición del consumo de combustible termina antes de la parada para la medición de la desviación, se detendrá el vehículo para la medición de la desviación en un período de 5 minutos. La desviación de cada medidor de par se calculará a partir de la media de una secuencia mínima de diez segundos.
Inmediatamente después, la verificación de las mediciones de las emisiones se llevará a cabo de conformidad con los procedimientos establecidos en el anexo II, apéndice 1, punto 2.7, del Reglamento (UE) n.o 582/2011.
6.1.5.7 Condiciones límite para el ensayo de verificación
Las condiciones límite que deben cumplirse para que un ensayo de verificación sea válido se establecen en los cuadros 3 y 3 ter.
Si el vehículo supera el ensayo de verificación de conformidad con el punto 7.3, el ensayo se dará por válido aunque no se cumplan las condiciones siguientes:
— | que no se alcancen los valores mínimos para los parámetros n.os 1, 2, 6 y 9; |
— | que se superen los valores máximos para los parámetros n.os 3, 4, 5, 7, 8, 10 y 12; |
— | que se superen los valores máximos del párametro n.o 7, si el tiempo total de ensayo excluyendo las paradas supera los 80 minutos. |
Cuadro 3
Parámetros para un ensayo de verificación válido para todos los grupos de vehículos
N.o | Parámetro | Mín. | Máx. |
1 | Calentamiento [minutos] | 60 |
|
2 | Velocidad media en el calentamiento [km/h] | 70 (5) | 100 |
3 | Duración de la medición del consumo de combustible [minutos] | 80 | 120 |
8 | Temperatura ambiente media | 5 °C | 30 °C |
9 | Carretera seca | 100 % |
|
10 | Carretera con nieve o hielo |
| 0 % |
11 | Altitud de la carretera [m] |
| 800 |
12 | Duración del ralentí continuo con el vehículo parado [minutos] |
| 3 |
Cuadro 3 bis
Parámetros para un ensayo de verificación válido para los grupos de vehículos 4, 5, 9 y 10
N.o | Parámetro | Mín. | Máx. |
4 | Porcentaje de conducción urbana basado en la distancia | 2 % | 8 % |
5 | Porcentaje de conducción rural basado en la distancia | 7 % | 13 % |
6 | Porcentaje de conducción en autopista basado en la distancia | 79 % | — |
7 | Porcentaje de tiempo de ralentí con el vehículo parado |
| 5 % |
Cuadro 3 ter
Parámetros para un ensayo de verificación válido para otros camiones pesados y medios
N.o | Parámetro | Mín. | Máx. |
4 | Porcentaje de conducción urbana basado en la distancia | 10 % | 50 % |
5 | Porcentaje de conducción rural basado en la distancia | 15 % | 25 % |
6 | Porcentaje de conducción en autopista basado en la distancia | 25 % | — |
7 | Porcentaje de tiempo de ralentí con el vehículo parado |
| 10 % |
En caso de que las condiciones del tráfico sean extraordinarias, se repetirá el ensayo de verificación.
6.1.6 Presentación de los datos
Los datos registrados durante el procedimiento de ensayo de verificación se presentarán a la autoridad de homologación que concedió la licencia para utilizar la herramienta de simulación de la manera siguiente:
Los datos registrados se presentarán en señales constantes de 2 Hz, como se establece en el cuadro 4. Los datos registrados con frecuencias superiores a 2 Hz se convertirán a 2 Hz promediando los intervalos temporales en torno a los nodos de 2 Hz. En el caso, por ejemplo, de un muestreo de 10 Hz, el primer nodo de 2 Hz sería el promedio resultante del segundo 0,1 al 0,5, el segundo nodo, el promedio resultante del segundo 0,6 al 1,0. El sello de tiempo de cada nodo será el último sello de tiempo por nodo, es decir, 0,5, 1,0, 1,5, etc.
Cuadro 4
Formato de presentación de los datos medidos para la herramienta de simulación en el ensayo de verificación
Cantidad | Unidad | Encabezamiento | Observación |
nodo de tiempo | [s] | <t> |
|
velocidad del vehículo | [km/h] | <v> |
|
velocidad del motor; | [rpm] | <n_eng> |
|
velocidad del ventilador de refrigeración del motor | [rpm] | <n_fan> | en el caso de los ventiladores de refrigeración del motor no accionados eléctricamente |
potencia eléctrica del ventilador de refrigeración del motor | [W] | <Pel_fan> | en el caso de los ventiladores de refrigeración del motor accionados eléctricamente |
par rueda izquierda | [Nm] | <tq_wh_left> |
|
par rueda derecha | [Nm] | <tq_wh_right> |
|
velocidad rueda izquierda | [rpm] | <n_wh_left> |
|
velocidad rueda derecha | [rpm] | <n_wh_right> |
|
marcha | [-] | <gear> | obligatorio para las transmisiones APT |
convertidor de par activo | [-] | <TC_active> | 0 = no activo (bloqueado); 1 = activo (desbloqueado); obligatorio para las transmisiones AT, no pertinente para los demás tipos de transmisión |
flujo de combustible | [g/h] | <fc_X> | Flujo másico de combustible con arreglo al punto 5.7 (6). Bajo el encabezamiento “X” irá el tipo de combustible de acuerdo con el anexo V, apéndice 7, cuadro 2 del presente Reglamento, por ejemplo “<fc_Diesel CI>”. En el caso de los motores de combustible dual, se proporcionará una columna separada para cada combustible. |
par motor | [Nm] | <tq_eng> | Par motor con arreglo al punto 5.10 |
flujo másico de CH4 | [g/s] | <CH4> | Únicamente si este componente debe medirse de conformidad con el anexo II, apéndice 1, punto 1, del Reglamento (UE) n.o 582/2011 |
flujo másico CO | [g/s] | <CO> |
|
flujo másico de NMHC | [g/s] | <NMHC> | Únicamente si este componente debe medirse de conformidad con el anexo II, apéndice 1, punto 1, del Reglamento (UE) n.o 582/2011 |
flujo másico de NOx | [g/s] | <NOx> |
|
flujo másico de THC | [g/s] | <THC> | Únicamente si este componente debe medirse de conformidad con el anexo II, apéndice 1, punto 1, del Reglamento (UE) n.o 582/2011 |
flujo del número de PM | [#/s] | <PN> |
|
flujo másico de CO2 | [g/s] |
|
|
Además, se comunicarán los datos que figuran en el cuadro 4 bis. Estos datos se introducirán directamente en la interfaz gráfica de usuario de la herramienta de simulación al evaluar el procedimiento de ensayo de verificación.
Cuadro 4 bis
Formato de presentación de los datos de información adicional para la herramienta de simulación en el ensayo de verificación
Cantidad | Unidad | Observación |
NCV medido | [MJ/kg] | Poder calorífico neto (NCV) del combustible utilizado en el ensayo de verificación, determinado de conformidad con el punto 3.2 del anexo V. Este dato se proporcionará para todos los tipos de combustible, es decir, también para los motores diésel de encendido por compresión (7). En el caso de los motores de combustible dual, se indicarán los valores correspondientes a ambos combustibles. |
Distancia de rodaje | [km] | De conformidad con el punto 6.1.2. Sobre la base de este dato, la herramienta de simulación corrige el consumo de combustible medido de conformidad con el apéndice 1. |
Diámetro del ventilador | [mm] | Diámetro del ventilador de refrigeración del motor. Este dato no es pertinente para los ventiladores de refrigeración de motor accionados eléctricamente. |
Desviación del medidor de par en la rueda izquierda | [Nm] | Lecturas medias de los medidores de par de conformidad con el punto 6.1.5.6. |
Desviación del medidor de par en la rueda derecha | [Nm] |
7. Evaluación del ensayo
7.1. Entrada de la herramienta de simulación
1) | Se pondrán a disposición de la herramienta de simulación las siguientes entradas: los datos de entrada y la información de entrada; |
2) | el archivo de registros del fabricante: |
3) | el archivo de información del cliente: |
4) | los datos de medición procesados de conformidad con el cuadro 4; |
5) | la información adicional de conformidad con el cuadro 4 bis. |
7.2. Etapas de evaluación realizadas por la herramienta de simulación
7.2.1. Verificación del proceso de gestión de datos
La herramienta de simulación simulará de nuevo las emisiones de CO2 y el consumo de combustible sobre la base de la información de entrada y los datos de entrada definidos en el punto 7.1 y verificará los resultados correspondientes en el archivo de registros del fabricante y en el archivo de información del cliente facilitados por el fabricante.
En caso de que se produzcan desviaciones, se aplicarán las medidas correctoras a las que se refiere el artículo 23.
7.2.2. Determinación de la relación CVTP
El ensayo de evaluación comparará las emisiones de CO2 durante la medición con las emisiones de CO2 simuladas. Para esta comparación, la herramienta de simulación deberá calcular la relación de las emisiones de CO2 específicas del freno medidas y simuladas en el trayecto total pertinente para el ensayo de verificación (CVTP) con arreglo a la siguiente ecuación:

Donde:
CVTP | = | relación de las emisiones de CO2 medidas y simuladas en el procedimiento de ensayo de verificación (‘CVTP ratio’) |
n | = | número de combustibles (2 para motores de combustible dual, 1 para los demás) |
CO2i | = | factor de emisión de CO2 genérico (gramos de CO2 por gramo de combustible) para el tipo concreto de combustible que se aplica en la herramienta de simulación. |
BSFCm-c | = | consumo de combustible específico del freno medido y corregido para una fase de rodaje, calculado de acuerdo con el punto 2 de la parte A del apéndice 1 [g/kWh] |
BSFCsim | = | consumo de combustible específico del freno determinado por la herramienta de simulación de conformidad con el punto 3 de la parte A del apéndice 1 [g/kWh] |
7.3. Comprobación de superado / no superado
El vehículo superará el ensayo de verificación si la relación CVTP determinada de acuerdo con el punto 7.2.2 es igual o inferior a la tolerancia establecida en el cuadro 5.
A efectos de comparación con las emisiones de CO2 declaradas del vehículo de conformidad con el artículo 9, las emisiones de CO2 verificadas del vehículo se determinarán de la manera siguiente:
CO2verified = CVTP × CO2declared
donde:
CO2verified | = | emisiones de CO2 verificadas del vehículo en [g/t-km] |
CO2declared | = | emisiones de CO2 declaradas del vehículo en [g/t-km] |
Si un primer vehículo no supera las tolerancias aplicables a la CVTP, podrán realizarse otros dos ensayos con el mismo vehículo o podrán someterse a ensayo otros dos vehículos similares a petición del fabricante de vehículos. Para la evaluación del criterio de superación establecido en el cuadro 5, se utilizarán las medias de las relaciones individuales de CVTP, como máximo, de los tres ensayos. Si no se cumple el criterio de superación, se considerará que el vehículo no ha superado el procedimiento de ensayo de verificación.
Cuadro 5
Criterio de superación o no superación del ensayo de verificación
Criterio de superación del procedimiento de ensayo de verificación | Relación CVTP ≤ 1,075 |
Cuando el CVTP sea inferior a 0,925, los resultados deberán comunicarse a la Comisión para su análisis posterior a fin de determinar la causa.
8. Procedimientos de notificación
El fabricante de vehículos elaborará un acta de ensayo por cada vehículo sometido a ensayo, e incluirá al menos los resultados del ensayo de verificación siguientes:
8.1. | Generalidades |
8.1.1. | Nombre y dirección del fabricante de vehículos |
8.1.2. | Dirección o direcciones de la planta o las plantas de montaje |
8.1.3. | Nombre, dirección, teléfono, fax y dirección de correo electrónico del representante del fabricante de vehículos |
8.1.4. | Tipo y denominación comercial |
8.1.5. | Criterios de selección del vehículo y de los componentes pertinentes para el CO2 (texto) |
8.1.6. | Propietario del vehículo |
8.1.7. | Lectura del cuentakilómetros al inicio del ensayo de medición del consumo de combustible (km) |
8.2. | Información del vehículo |
8.2.1. | Modelo de vehículo / Denominación comercial |
8.2.2. | Número de identificación del vehículo (VIN) |
8.2.2.1. | Cuando el ensayo se haya realizado siguiendo una situación en la que el primer ensayo del vehículo termine sin superar las tolerancias mencionadas en el punto 7.3, el número de identificación del vehículo (VIN) del vehículo sometido a ensayo en primer lugar |
8.2.3. | Categoría del vehículo (N2, N3) |
8.2.4. | Configuración de los ejes |
8.2.5. | Masa máxima en carga técnicamente admisible (t) |
8.2.6. | Grupo de vehículos |
8.2.7. | Masa real del vehículo corregida (kg) |
8.2.8. | Hash criptográfico del archivo de registros del fabricante |
8.2.9. | Peso bruto combinado de la combinación de vehículos en el ensayo de verificación (kg) |
8.2.10. | Masa en orden de marcha |
8.3. | Especificaciones principales del motor |
8.3.1. | Modelo de motor |
8.3.2. | Número de certificación del motor |
8.3.3. | Potencia nominal del motor (kW) |
8.3.4. | Cilindrada (l) |
8.3.5. | Tipo de combustible de referencia del motor (gasóleo/GLP/GNC, etc.) |
8.3.6. | Hash del archivo/documento del mapa de combustible |
8.4. | Especificaciones principales de la transmisión |
8.4.1. | Modelo de transmisión |
8.4.2. | Número de certificación de la transmisión |
8.4.3. | Opción principal utilizada para generar los mapas de pérdida (Opción 1 / Opción 2 / Opción 3 / Valores normalizados) |
8.4.4. | Tipo de transmisión |
8.4.5. | Número de marchas |
8.4.6. | Relación de transmisión en la última marcha |
8.4.7. | Tipo de ralentizador |
8.4.8. | Toma de fuerza (sí/no) |
8.4.9. | Hash del archivo/documento del mapa de eficiencia |
8.5. | Especificaciones principales del ralentizador |
8.5.1. | Modelo de ralentizador |
8.5.2. | Número de certificación del ralentizador |
8.5.3. | Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición) |
8.5.4. | Hash del archivo/documento del mapa de eficiencia del ralentizador |
8.6. | Especificación del convertidor de par |
8.6.1. | Modelo de convertidor de par |
8.6.2. | Número de certificación del convertidor de par |
8.6.3. | Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición) |
8.6.4. | Hash del archivo/documento del mapa de eficiencia |
8.7. | Especificaciones del reenvío angular |
8.7.1. | Modelo de reenvío angular |
8.7.2. | Número de certificación del eje |
8.7.3. | Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición) |
8.7.4. | Relación de reenvío angular |
8.7.5. | Hash del archivo/documento del mapa de eficiencia |
8.8. | Especificaciones del eje |
8.8.1. | Modelo de eje |
8.8.2. | Número de certificación del eje |
8.8.3. | Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados / medición) |
8.8.4. | Tipo de eje (por ejemplo, eje motor único estándar) |
8.8.5. | Desmultiplicación final |
8.8.6. | Hash del archivo/documento del mapa de eficiencia |
8.9. | Aerodinámica |
8.9.1. | Modelo |
8.9.2. | Opción de certificación utilizada para generar CdxA (valores normalizados / medición) |
8.9.3. | Número de certificación de CdxA (si es aplicable) |
8.9.4. | Valor CdxA |
8.9.5. | Hash del archivo/documento del mapa de eficiencia |
8.10. | Especificaciones principales de los neumáticos |
8.10.1. | Número de certificación de los neumáticos de todos los ejes |
8.10.2. | Coeficiente de resistencia a la rodadura específico de todos los neumáticos de todos los ejes |
8.11. | Especificaciones principales de los accesorios |
8.11.1. | Tecnología del ventilador de refrigeración del motor |
8.11.1.1. | Diámetro del ventilador de refrigeración del motor |
8.11.2. | Tecnología de la bomba de dirección |
8.11.3. | Tecnología de sistema eléctrico |
8.11.4. | Tecnología de sistema neumático |
8.12. | Condiciones de ensayo |
8.12.1. | Masa real del vehículo para el procedimiento de ensayo de verificación (kg) |
8.12.2. | Masa real del vehículo para el procedimiento de ensayo de verificación con carga útil (kg) |
8.12.3. | Tiempo de calentamiento (minutos) |
8.12.4. | Velocidad media en el calentamiento (km/h) |
8.12.5. | Duración de la medición del consumo de combustible (minutos) |
8.12.6. | Porcentaje de conducción urbana basado en la distancia (%) |
8.12.7. | Porcentaje de conducción rural basado en la distancia (%) |
8.12.8. | Porcentaje de conducción en autopista basado en la distancia (%) |
8.12.9. | Porcentaje de tiempo de ralentí con el vehículo parado (%) |
8.12.10. | Temperatura ambiente media (°C) |
8.12.11. | Condición de la carretera [seca, mojada, con nieve, con hielo, otras (especifíquense)] |
8.12.12. | Altitud máxima de la carretera (m) |
8.12.13. | Duración máxima del ralentí continuo con el vehículo parado (minutos) |
8.13. | Resultados del ensayo de verificación |
8.13.1. | Potencia media del ventilador calculada por la herramienta de simulación para el ensayo de verificación (kW) |
8.13.2. | Trabajo positivo de la rueda durante el ensayo de verificación calculado por la herramienta de simulación (kWh) |
8.13.3. | Trabajo positivo de la rueda durante el ensayo de verificación medido (kWh) |
8.13.4. | NCV de los combustibles utilizados en el ensayo de verificación (MJ/kg) |
8.13.5. | Valor(es) de consumo de combustible en el ensayo de verificación medido(s) (g/kWh) |
8.13.5.1 | Valor(es) de emisiones de CO2 en el ensayo de verificación medido(s) (g/kWh) |
8.13.6. | Valor(es) de consumo de combustible en el ensayo de verificación medido(s), corregido(s) (g/kWh) |
8.13.6.1 | Valor(es) de emisiones de CO2 en el ensayo de verificación medido(s), corregido(s) (g/kWh) |
8.13.7. | Valor(es) de consumo de combustible en el ensayo de verificación simulados(s) (g/kWh) |
8.13.7.1 | Valor(es) de emisiones de CO2 en el ensayo de verificación simulado(s) (g/kWh) |
8.13.8. | Consumo de combustible en el ensayo de verificación simulado (g/kWh) |
8.13.8.1 | Emisiones de CO2 en el ensayo de verificación simulado (g/kWh) |
8.13.9. | Perfil de utilización [larga distancia / larga distancia (EMS) / regional / regional (EMS) / urbano / municipal / construcción] |
8.13.10. | Emisiones de CO2 verificadas del vehículo (g/tkm) |
8.13.11. | Emisiones de CO2 declaradas del vehículo (g/tkm) |
8.13.12. | Relación del consumo de combustible medido respecto del simulado en el procedimiento de ensayo de verificación (CVPT) en (-) |
8.13.13. | Superado el ensayo de verificación (sí/no) |
8.13.14. | Emisiones contaminantes en el ensayo de verificación |
8.13.14.1. | CO (mg/kWh) |
8.13.14.2. | THC (**) (mg/kWh) |
8.13.14.3. | NMHC (***) (mg/kWh) |
8.13.14.4. | CH4 (***) (mg/kWh) |
8.13.14.5. | NOx (mg/kWh) |
8.13.14.6. | Número PM (#/kWh) |
8.13.14.7. | Trabajo positivo del motor (kWh) |
8.14. | Software e información para el usuario |
8.14.1. | Versión de la herramienta de simulación (X.X.X) |
8.14.2. | Fecha y hora de la simulación |
8.15. | Entradas de la herramienta de simulación establecidas en el punto 7.1. |
8.16. | Datos de salida de simulación |
8.16.1. | Los resultados agregados de la simulación El archivo de valores separados por comas del mismo nombre que el archivo de trabajo y con una extensión “.vsum” que comprende los resultados agregados de la prueba de verificación simulada generados por la herramienta de simulación en su versión de la interfaz gráfica de usuario (GUI) (“sum exec data file”). |
8.16.2. | Los resultados simulación con resolución temporal El archivo de valores separados por comas cuyo nombre contiene el VIN y el nombre del fichero de datos de la medición y una extensión “vmod”, que comprende los resultados de la resolución temporal del ensayo de verificación simulado generado por la herramienta de simulación en su versión de la interfaz gráfica de usuario (GUI) (“mod data file”). |
Apéndice 1
Principales etapas y ecuaciones de evaluación realizadas por la herramienta de simulación en una simulación del procedimiento de ensayo de verificación
En el presente apéndice se describen las principales etapas de evaluación y las ecuaciones básicas subyacentes que aplica la herramienta de simulación en una simulación del procedimiento de ensayo de verificación.
PARTE A: Determinación del factor CVTP
Para la determinación del factor CVTP descrito en el punto 7.2.2, se aplicarán los procedimientos de cálculo que figuran a continuación:
1. | Cálculo de la potencia en rueda Los datos del par, leídos a partir de los datos de medición procesados de acuerdo con el cuadro 4, se corregirán para tener en cuenta la desviación del medidor de par como sigue:  donde:
La potencia en rueda se calcula a partir del par de las ruedas y la velocidad de giro de las ruedas corregidos, del siguiente modo:  donde:
La potencia en rueda total se calcula entonces como la suma de la potencia en rueda de las ruedas izquierda y derecha:  |
2. | Determinación del consumo de combustible específico del freno (FCm-c) El resultado correspondiente al “consumo de combustible específico del freno medido y corregido para una fase de rodaje” (BSFCm-c) solicitado en 7.2.2 será calculado por la herramienta de simulación como se describe a continuación. En una primera fase, el valor bruto del consumo de combustible específico del freno medido para el ensayo de verificación BSFCm se calculará como sigue:  donde:
 En una segunda fase BSFCm es corregido por el poder calorífico neto (NCV) del combustible utilizado en el ensayo de verificación, lo que da como resultado BSFCm,corr:  donde:
Esta corrección se aplica a todos los tipos de combustible, es decir, también a los motores diésel de encendido por compresión (véase la nota al pie n.o 2 del cuadro 4 bis). En una tercera fase se aplica la corrección correspondiente a una fase de rodaje:  donde:
En el caso de los vehículos de combustible dual, las tres fases de evaluación se llevan a cabo por separado para ambos combustibles. |
3. | Determinación del consumo de combustible específico del freno simulado por la herramienta de simulación (BSFCsim) En el modo de ensayo de verificación de la herramienta de simulación, la potencia en rueda medida se aplica como entrada del algoritmo de simulación hacia atrás. Las marchas utilizadas durante el ensayo de verificación se determinan calculando las velocidades del motor por marcha a la velocidad del vehículo medida y seleccionando la marcha que proporciona la velocidad del motor más próxima a la velocidad del motor medida. Para las transmisiones APT durante las fases con convertidor de par activo, se utiliza la señal de marcha real de la medición. Los modelos de pérdida para engranajes por eje, reenvío angular, ralentizadores, transmisiones y PTO se aplican de manera similar a en el modo de declaración de la herramienta de simulación. En el caso de la demanda de energía de unidades auxiliares en relación con la bomba de dirección, el sistema neumático, el sistema eléctrico y el sistema HVAC, se aplican los valores genéricos aplicados según la tecnología en la herramienta de simulación. Para calcular la demanda de energía del ventilador de refrigeración del motor se aplican las fórmulas siguientes: Caso a). Ventiladores de refrigeración del motor no accionados eléctricamente:  donde:
Caso b). Ventiladores de refrigeración del motor accionados eléctricamente: Pfan(t) = Pel(t) . 1,05
En el caso de vehículos con parada y arranque del motor durante el ensayo de verificación, se aplican correcciones para la demanda de potencia auxiliar y la energía para volver a arrancar el motor similares a las aplicadas en el modo de declaración de la herramienta de simulación. La simulación del consumo instantáneo de combustible de los motores FCsim(t) se realizará para cada intervalo de 0,5 segundos como sigue:
El consumo de combustible específico del freno, calculado por la herramienta de simulación BSFCm-c aplicado en el punto 7.2.2 al cálculo del factor CVTP, se calcula como sigue:  donde:

En el caso de motores de combustible dual, se determina BSFCsim is por separado para ambos combustibles. |
PARTE B: Determinación de las emisiones contaminantes específicas del freno
La potencia del motor se calcula a partir de las señales medidas para la velocidad y el par del motor como sigue:

donde:
Peng,m | = | potencia del motor medida para el ensayo de verificación [kW] |
t | = | nodo de tiempo [s] |
neng | = | velocidad de giro del motor medida [rpm] |
Teng | = | par motor medido [Nm] |
El trabajo positivo del motor medido en el ensayo de verificación se calcula como sigue:
Weng,pos,m | = | trabajo positivo del motor medido en el ensayo de verificación [kWh] |
fs | = | índice de muestreo = 2 [Hz] |
tstart | = | primer sello de tiempo en los datos de medición procesados de conformidad con el cuadro 4 [s] |
tend | = | último sello de tiempo en los datos de medición procesados de conformidad con el cuadro 4 [s] |
Las emisiones contaminantes específicas del freno medidas en el ensayo de verificación BSEM se calculan del modo siguiente:
donde:
BSEM | = | emisiones contaminantes específicas del freno medidas en el ensayo de verificación [g/kWh] |
EM | = | flujo másico de la emisión contaminante instantánea medida durante el ensayo de verificación [g/s] |
(*) | Directiva 96/53/CE del Consejo, de 25 de julio de 1996, por la que se establecen, para determinados vehículos de carretera que circulan en la Comunidad, las dimensiones máximas autorizadas en el tráfico nacional e internacional y los pesos máximos autorizados en el tráfico internacional (DO L 235 de 17.9.1996, p. 59). |
(**) | Únicamente si este componente debe medirse de conformidad con el anexo II, apéndice 1, punto 1, del Reglamento (UE) n.o 582/2011. |
(***) | Para los motores de encendido por chispa.. |
(*1) Debe considerarse el total de todos los vehículos de un fabricante que entran en el ámbito de aplicación del presente Reglamento y tanto los camiones medios como los camiones pesados deben estar cubiertos por el procedimiento de ensayo de verificación a lo largo de un período de seis años.
(*2) El procedimiento de ensayo de verificación se realizará en los dos primeros años.
(1) “Tiempo de subida” significa el tiempo transcurrido entre la respuesta al 10 % y la respuesta al 90 % de la lectura final del analizador (t90 – t10).
(2) La exactitud deberá cumplirse con la totalidad del flujo de combustible durante 100 minutos.
(3) “No linealidad” significa la desviación máxima entre las características ideales y reales de la señal de salida en relación con el valor medido en un intervalo específico de medición.
(4) “Repetibilidad” significa el grado de concordancia entre los resultados de sucesivas mediciones del mismo valor medido realizadas en las mismas condiciones de medición.
(5) Cuando la velocidad máxima del vehículo sea inferior a 80 km/h, la velocidad media en el calentamiento deberá superar la velocidad máxima del vehículo menos 10 km/h.
(6) La corrección del flujo de combustible con respecto al NCV estándar la realiza automáticamente la herramienta de simulación sobre la base de la entrada del poder calorífico neto (NCV) del combustible utilizado en el ensayo de verificación de conformidad con el cuadro 4 bis.
(7) En el ensayo VTP, el vehículo podrá funcionar con gasóleo comercial. Contrariamente a lo que ocurre con el gasóleo de referencia (B7), se considera que la variación del NCV para el combustible comercial es mayor que la precisión de la medición a la hora de determinar el NCV.
CERTIFICACIÓN DE LOS COMPONENTES DE UN TREN DE POTENCIA ELÉCTRICO
1. Introducción
Con los procedimientos de ensayo de componentes descritos en el presente anexo se obtendrán los datos de entrada relacionados con los sistemas de máquina eléctrica, los IEPC, los IHPC de tipo 1, los sistemas de baterías y los sistemas de condensadores para la herramienta de simulación.
2. Definiciones y abreviaturas
A efectos del presente anexo, se aplicarán las definiciones siguientes:
1) | “Unidad de control de baterías” o “UCB”: dispositivo electrónico que controla, gestiona, detecta o calcula funciones eléctricas y térmicas del sistema de baterías y que proporciona la comunicación entre el sistema o el paquete de baterías o parte de un paquete de baterías y los demás controladores del vehículo. |
2) | “Paquete de baterías”: SAEER (sistema de almacenamiento de energía eléctrica recargable) que incluye elementos secundarios o conjuntos de elementos secundarios que están normalmente conectados con un sistema electrónico de elementos, circuitos de alimentación eléctrica y un dispositivo de cierre en caso de sobreintensidad, incluidas las interconexiones eléctricas y las interfaces para sistemas externos (ejemplos de sistemas externos son los sistemas destinados al acondicionamiento térmico, a los accesorios de alta y baja tensión y a la comunicación). |
3) | “Sistema de baterías”: SAEER que consta de conjuntos de elementos secundarios o paquetes de baterías, así como circuitos eléctricos, un sistema electrónico, interfaces para sistemas externos (por ejemplo, sistemas de acondicionamiento térmico), UCB y contactores. |
4) | “Subsistema de baterías representativo”: subsistema de un sistema de baterías compuesto por conjuntos de elementos secundarios o paquetes de baterías configurados en serie o en paralelo con circuitos eléctricos, interfaces del sistema de acondicionamiento térmico, unidades de control y un sistema electrónico de elementos. |
5) | “Elemento”: unidad funcional básica de una batería, consistente en un conjunto de electrodos, electrolito, contenedor, bornes y normalmente separadores, es decir, una fuente de energía eléctrica obtenida por conversión directa de energía química. |
6) | “Sistema electrónico de elementos”: dispositivo electrónico que recoge y posiblemente controla datos térmicos o eléctricos de los elementos, los conjuntos de elementos, los condensadores o los conjuntos de condensadores y contiene un sistema electrónico para equilibrar entre elementos o condensadores, en caso necesario. |
7) | “Elemento secundario”: elemento diseñado para ser recargado eléctricamente mediante una reacción química reversible. |
8) | “Condensador”: dispositivo de acumulación de energía eléctrica que se obtiene por los efectos de la capacidad electrostática de doble capa y de la pseudocapacidad electroquímica en un elemento electroquímico. |
9) | “Elemento de condensador”: unidad funcional básica de un condensador, consistente en un conjunto de electrodos, electrolito, contenedor, bornes y normalmente separadores. |
10) | “Unidad de control de condensadores” o “UCC”: dispositivo electrónico que controla, gestiona, detecta o calcula funciones eléctricas y térmicas del sistema de condensadores y que proporciona la comunicación entre el sistema o el paquete de condensadores o parte de un paquete de condensadores y los demás controladores del vehículo. |
11) | “Paquete de condensadores”: SAEER que incluye elementos de condensadores o conjuntos de condensadores normalmente conectados con un sistema electrónico de elementos de condensador, circuitos de alimentación y un dispositivo de cierre en caso de sobreintensidad, incluidas las interconexiones eléctricas, las interfaces para sistemas externos y la UCC. Ejemplos de sistemas externos son el acondicionamiento térmico, los accesorios de alta tensión y baja tensión y la comunicación. |
12) | “Sistema de condensadores”: SAEER que incluye elementos de condensador, conjuntos de condensadores o paquetes de condensadores, así como circuitos eléctricos, un sistema electrónico, interfaces para sistemas externos (por ejemplo, sistemas de acondicionamiento térmico), UCC y contactores. |
13) | “Subsistema de condensadores representativo”: subsistema de un sistema de condensadores compuesto por conjuntos de condensadores o paquetes de condensadores configurados en serie o en paralelo con circuitos eléctricos, interfaces del sistema de acondicionamiento térmico, unidades de control y un sistema electrónico de elementos de condensador. |
14) | “nC”: corriente nominal igual a n veces la capacidad de descarga en una hora expresada en amperios (es decir, corriente que requiere 1/n horas para cargar o descargar completamente el dispositivo sometido a ensayo sobre la base de la capacidad asignada). |
15) | “Transmisión variable continua”: transmisión automática que puede cambiar sin interrupciones a través de una gama continua de relaciones de transmisión. |
16) | “Diferencial”: dispositivo que divide un par en dos ramas, por ejemplo, para las ruedas del lado izquierdo y del lado derecho, permitiendo al mismo tiempo que estas ramas giren a velocidades desiguales. La función de división del par puede estar sesgada o desactivada por un dispositivo diferencial de freno o de bloqueo (si procede). |
17) | “Relación de transmisión diferencial”: relación entre la velocidad de entrada del diferencial (hacia el convertidor de energía de propulsión primaria) y la velocidad de salida del diferencial (hacia las ruedas motrices) con los dos árboles de salida del diferencial funcionando a la misma velocidad. |
18) | “Tren de transmisión”: elementos conectados del tren de potencia destinados a transmitir la energía mecánica entre los convertidores de la energía de propulsión y las ruedas. |
19) | “Máquina eléctrica”: convertidor de energía que transforma la energía eléctrica en energía mecánica. |
20) | “Sistema de máquina eléctrica”: combinación de componentes de un tren de potencia eléctrico instalados en el vehículo, que incluye una máquina eléctrica, un inversor y una o varias unidades de control electrónico, incluidas las conexiones e interfaces para sistemas externos. |
21) | “Tipo de máquina eléctrica”: a) una máquina asíncrona (ASM), b) una máquina síncrona excitada (ESM), c) una máquina síncrona de imán permanente (PSM), o d) una máquina de reluctancia (RM). |
22) | “ASM”: tipo de máquina eléctrica asíncrona en la que la corriente eléctrica del rotor necesaria para producir el par se obtiene por inducción electromagnética procedente del campo magnético del devanado estatórico. |
23) | “ESM”: tipo de máquina eléctrica síncrona excitada que contiene electroimanes multifásicos de corriente alterna en el estátor que crean un campo magnético que gira a un tiempo con las oscilaciones de la corriente de línea. Requiere corriente continua suministrada al rotor para su excitación. |
24) | “PSM”: tipo de máquina eléctrica síncrona de imán permanente que contiene electroimanes multifásicos de corriente alterna en el estátor que crean un campo magnético que gira a un tiempo con las oscilaciones de la corriente de línea. Los imanes permanentes integrados en el rotor de acero crean un campo magnético constante. |
25) | “RM”: tipo de máquina eléctrica de reluctancia que contiene electroimanes multifásicos de corriente alterna en el estátor que crean un campo magnético que gira a un tiempo con las oscilaciones de la corriente de línea. Induce polos magnéticos no permanentes sobre el rotor ferromagnético que no tiene bobinado. Genera par por reluctancia magnética. |
26) | “Caja”: parte estructural e integrada del componente que confina las unidades internas y las protege del contacto directo desde cualquier dirección de acceso. |
27) | “Convertidor de energía”: sistema en el que la forma de energía de salida es diferente de la forma de energía de entrada. |
28) | “Convertidor de la energía de propulsión”: convertidor de energía del tren de potencia que no es un dispositivo periférico y cuya energía de salida se utiliza directa o indirectamente para propulsar el vehículo. |
29) | “Categoría de convertidor de la energía de propulsión”: bien i) un motor de combustión interna, bien ii) una máquina eléctrica, bien iii) una pila de combustible. |
30) | “Sistema de almacenamiento de energía”: sistema que almacena energía y la libera con la misma forma que la energía de entrada. |
31) | “Sistema de almacenamiento de la energía de propulsión”: sistema de almacenamiento de energía del tren de potencia que no es un dispositivo periférico y cuya energía de salida se utiliza directa o indirectamente para propulsar el vehículo. |
32) | “Categoría de sistema de almacenamiento de la energía de propulsión”: bien i) un sistema de almacenamiento de combustible, bien ii) un sistema de almacenamiento de energía eléctrica recargable (SAEER), bien iii) un sistema de almacenamiento de energía mecánica recargable. |
33) | “Forma de energía”: o bien i) energía eléctrica, o ii) energía mecánica, o iii) energía química (incluidos los combustibles). |
34) | “Sistema de almacenamiento de combustible”: sistema de almacenamiento de la energía de propulsión que almacena energía química como combustible líquido o gaseoso. |
35) | “Caja de cambios”: dispositivo que cambia el par y la velocidad con relaciones fijas definidas para cada marcha y que puede incluir también la funcionalidad de las marchas variables. |
36) | “Número de marcha”: identificador de las diferentes marchas variables para la dirección hacia delante en una transmisión con relaciones de transmisión específicas; a la marcha variable con la relación de transmisión más elevada se le asigna el número 1; el número de identificación se incrementa en 1 para cada marcha en el orden decreciente de las relaciones de transmisión. |
37) | “Relación de transmisión”: relación de transmisión hacia delante de la velocidad del árbol de entrada (hacia el convertidor de energía de propulsión primaria) respecto de la velocidad del árbol de salida (hacia las ruedas motrices) sin resbalamiento. |
38) | “Sistema de baterías de alta energía” o “HEBS”: sistema de baterías o subsistema de baterías representativo en el que la relación numérica entre la corriente máxima de descarga en A, declarada por el fabricante de componentes con un estado de carga del 50 % de conformidad con el punto 5.4.2.3.2, y la potencia nominal de carga eléctrica en Ah a una velocidad de descarga de 1 C a temperatura ambiente es inferior a 10. |
39) | “Sistema de baterías de alta potencia” o “HPBS”: sistema de baterías o subsistema de baterías representativo en el que la relación numérica entre la corriente máxima de descarga en A, declarada por el fabricante de componentes con un estado de carga del 50 % de conformidad con el punto 5.4.2.3.2, y la potencia nominal de carga eléctrica en Ah a una velocidad de descarga de 1 C a temperatura ambiente es igual o superior a 10. |
40) | “Componente integrado de tren de potencia eléctrico” o “IEPC”: sistema combinado de un sistema de máquina eléctrica, junto con la funcionalidad de una caja de cambios de una o varias velocidades, de un diferencial o de ambos, que posee al menos una de las características siguientes:
Además, el IEPC deberá cumplir los siguientes criterios:
|
41) | “Diseño de IEPC de tipo motor en rueda”: un IEPC con un árbol de salida o dos árboles de salida conectados directamente a los bujes de las ruedas y en el que se distinguirán dos configuraciones a efectos del presente anexo:
|
42) | “Componente integrado de tren de potencia de vehículo eléctrico híbrido de tipo 1” o “IHPC de tipo 1”: sistema combinado de múltiples sistemas de máquina eléctrica, junto con la funcionalidad de una caja de cambios de varias velocidades, caracterizado por una caja compartida por todos los componentes y al menos una de las características siguientes:
Además, el IHPC de tipo 1 deberá cumplir los siguientes criterios:
|
43) | “Motor de combustión interna” o “ICE”: convertidor de energía con oxidación intermitente o continua del carburante que transforma la energía química en mecánica. |
44) | “Inversor”: convertidor de energía eléctrica que transforma la corriente eléctrica directa en corriente eléctrica monofásica o polifásica alterna. |
45) | “Dispositivo periférico”: dispositivo que consume, convierte, almacena o suministra energía que no se utiliza primariamente para la propulsión del vehículo, pero que es esencial para el funcionamiento del tren de potencia y se considera, por tanto, parte de este. |
46) | “Tren de potencia”: combinación total en un vehículo de los sistemas de almacenamiento de la energía de propulsión, los convertidores de la energía de propulsión y los trenes de transmisión que proporcionan la energía mecánica a las ruedas para propulsar el vehículo, junto con los dispositivos periféricos. |
47) | “Capacidad asignada”: número total de amperios-hora que pueden extraerse de una batería completamente cargada, determinado de conformidad con el punto 5.4.1.3. |
48) | “Velocidad asignada”: velocidad de giro más alta del sistema de máquina eléctrica en la que se produce el par máximo global. |
49) | “Temperatura ambiente”: el aire ambiente dentro de la celda de ensayo deberá tener una temperatura de (25 ± 10) °C. |
50) | “Estado de carga”: la carga eléctrica disponible almacenada en un sistema de baterías, expresada como porcentaje de su capacidad asignada de conformidad con el punto 5.4.1.3 (en la que el 0 % significa “vacío” y el 100 % significa “lleno”). |
51) | “Unidad sometida a ensayo” o “UUT”: el sistema de máquina eléctrica, IEPC o IHPC de tipo 1 que va a someterse realmente a ensayo. |
52) | “UUT de batería”: sistema de baterías o subsistema de baterías representativo que va a someterse realmente a ensayo. |
53) | “UUT de condensador”: sistema de condensadores o subsistema de condensadores representativo que va a someterse realmente a ensayo. |
A efectos del presente anexo, se aplicarán las abreviaturas siguientes:
CA | corriente alterna |
CC | corriente continua |
DCIR | resistencia interna a la corriente continua |
SME | sistema de máquina eléctrica |
OCV | tensión en circuito abierto |
CE | ciclo estándar |
3. Requisitos generales
Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma IATF 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración o la verificación deberán ajustarse a normas nacionales o internacionales.
3.1. Especificaciones del equipo de medición
El equipo de medición deberá cumplir los siguientes requisitos de exactitud:
Cuadro 1
Requisitos de los sistemas de medición
Sistema de medición | Exactitud (1) |
Velocidad de giro | 0,5 % de la lectura del analizador o 0,1 % de la calibración máxima (2) de la velocidad de giro, si este último valor es mayor |
Par | 0,6 % de la lectura del analizador o 0,3 % de la calibración máxima (2) o 0,5 Nm de par, el valor que sea mayor |
Corriente | 0,5 % de la lectura del analizador o 0,25 % de la calibración máxima (2) o 0,5 A de corriente, el valor que sea mayor |
Tensión | 0,5 % de la lectura del analizador o 0,25 % de la calibración máxima (2) de la tensión, si este último valor es mayor |
Temperatura | 1,5 K |
Se permitirá una calibración multipunto, lo que significa que un sistema de medición puede calibrarse hasta un valor nominal inferior a la capacidad del sistema de medición.
3.2. Registro de datos
Todos los datos de medición, excepto la temperatura, se medirán y registrarán a una frecuencia no inferior a 100 Hz. Para la temperatura, será suficiente una frecuencia de medición no inferior a 10 Hz.
Previo acuerdo con la autoridad de homologación podrá aplicarse el filtrado de señales. Se evitará todo efecto de solape.
4. Ensayo de sistemas de máquina eléctrica, IEPC e IHPC de tipo 1
4.1. Condiciones de ensayo
Se instalará la UUT y se definirán los mensurandos corriente, tensión, potencia eléctrica del inversor, velocidad de giro y par de acuerdo con la figura 1 y el punto 4.1.1.
Figura 1
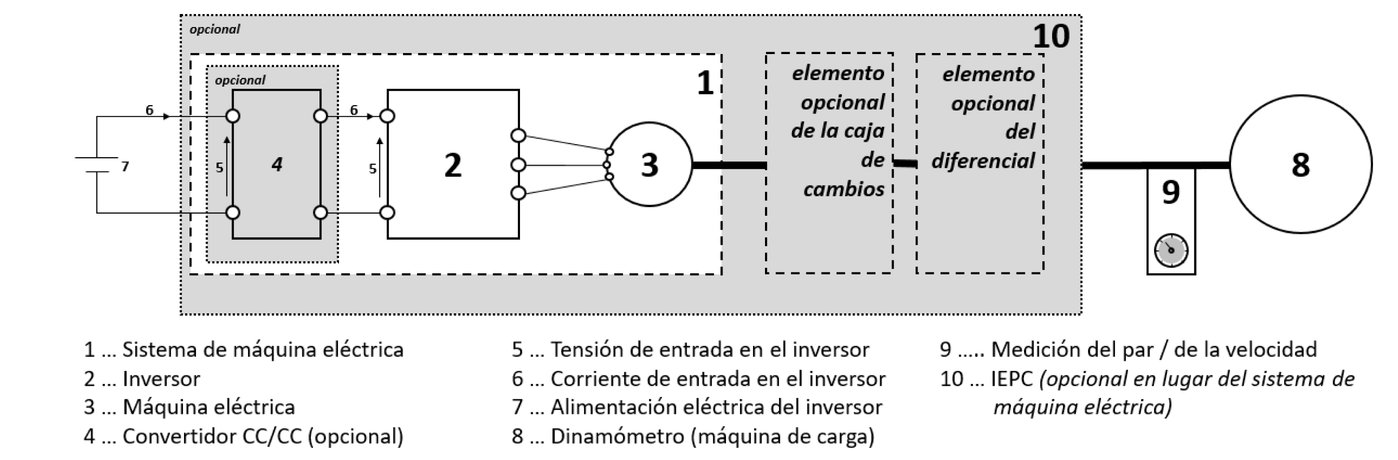
4.1.1. Ecuaciones de las cifras de potencia
Las cifras de potencia se calcularán de conformidad con las siguientes ecuaciones:
4.1.1.1. Potencia del inversor
La potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede) se calculará con arreglo a la siguiente ecuación:
PINV_in = VINV_in × IINV_in
donde:
PINV_in | es la potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede) en el lado de corriente continua del inversor (o en el lado de la fuente de alimentación de corriente continua del convertidor CC/CC) [W] |
VINV_in | es la tensión en la entrada del inversor (o el convertidor CC/CC, si procede) en el lado de corriente continua del inversor (o en el lado de la fuente de alimentación de corriente continua del convertidor CC/CC) [V] |
IINV_in | es la corriente en la entrada del inversor (o el convertidor CC/CC, si procede) en el lado de corriente continua del inversor (o en el lado de la fuente de alimentación de corriente continua del convertidor CC/CC) [A] |
En el caso de conexiones múltiples de inversores (o convertidores CC/CC, si procede) a la fuente de alimentación eléctrica de corriente continua definida de conformidad con el punto 4.1.3, se medirá la suma total de todas las diferentes potencias eléctricas de los inversores.
4.1.1.2. Potencia de salida mecánica
La potencia de salida mecánica de la UUT se calculará de acuerdo con la ecuación siguiente:

donde
PUUT_out | es la potencia de salida mecánica de la UUT [W] |
TUUT | es el par de la UUT [Nm] |
n | es la velocidad de giro de la UUT [min–1] |
En el caso de un sistema de máquina eléctrica, el par y la velocidad se medirán en el árbol de rotación. En el caso de un IEPC, el par y la velocidad se medirán en el lado de salida de la caja de cambios o, si también se incluye un diferencial, en los lados de salida de este.
En el caso de un IEPC con diferencial integrado, los dispositivos de medición del par de salida pueden instalarse en ambos lados de salida o solo en uno de ellos. En el caso de las configuraciones de ensayo con un solo dinamómetro en el lado de salida, el extremo de giro libre del IEPC con diferencial integrado tendrá bloqueado el giro al otro extremo en el lado de salida (por ejemplo, mediante la activación de un bloqueo del diferencial o mediante cualquier otro bloqueo mecánico del diferencial aplicado únicamente para la medición).
En el caso de un diseño de IEPC de tipo motor en rueda, podrán medirse uno o dos de estos componentes. Cuando se midan dos de estos componentes, se aplicarán las disposiciones siguientes, en función de la configuración:
— | En el caso de una configuración en “L”, el par y la velocidad se medirán en el lado de salida de la caja de cambios. En este caso, el parámetro de entrada “NrOfDesignTypeWheelMotorMeasured” se ajustará en 1. |
— | En el caso de una configuración en “T”, los dispositivos de medición del par de salida pueden instalarse en ambos árboles de salida o solo en uno de ellos.
|
4.1.2. Rodaje
Previa petición del solicitante, la UUT podrá ser sometida a un procedimiento de rodaje. En el caso de un procedimiento de rodaje, serán de aplicación las disposiciones siguientes:
— | El tiempo total de rodaje opcional y de medición de una UUT (a excepción de lo relativo a los extremos de las ruedas) no excederá de 120 horas. |
— | Para el procedimiento de rodaje, solo se utilizará el aceite de llenado en fábrica. El aceite utilizado para el rodaje también podrá utilizarse en los ensayos realizados de conformidad con el punto 4.2. |
— | El perfil de velocidad y de par del procedimiento de rodaje será el especificado por el fabricante de componentes. |
— | El fabricante de componentes documentará el procedimiento de rodaje en lo relativo al tiempo de rodaje, la velocidad, el par y la temperatura del aceite, lo que se notificará a la autoridad de homologación. |
— | Los requisitos relativos a la temperatura del aceite (punto 4.1.8.1), la exactitud de las mediciones (punto 3.1) y la configuración del ensayo (puntos 4.1.3 a 4.1.7) no serán de aplicación al procedimiento de rodaje. |
4.1.3. Alimentación eléctrica del inversor
La alimentación eléctrica del inversor (o, en su caso, del convertidor CC/CC) será una fuente de alimentación de tensión constante en corriente continua, capaz de suministrar/absorber la potencia eléctrica adecuada hacia/desde el inversor (o el convertidor CC/CC, si procede) a la potencia máxima (mecánica o eléctrica) de la UUT durante las rondas de ensayo especificadas en el presente anexo.
La tensión de entrada de corriente continua al inversor (o convertidor CC/CC, si procede) deberá situarse en un intervalo de ± 2 % del valor deseado requerido de tensión de entrada con corriente continua de la UUT durante todos los períodos en los que se registren datos de medición reales que se utilicen como base para determinar los datos de entrada para la herramienta de simulación.
El cuadro 2 del punto 4.2 define qué rondas de ensayo deben realizarse a qué niveles de tensión. Existen dos niveles de tensión diferentes definidos para las mediciones que deben realizarse:
— | Vmin,Test será el valor deseado de la tensión de entrada con corriente continua de la UUT correspondiente a la tensión mínima para una capacidad de funcionamiento ilimitada. |
— | Vmax,Test será el valor deseado de la tensión de entrada con corriente continua de la UUT correspondiente a la tensión máxima para una capacidad de funcionamiento ilimitada. |
4.1.4. Configuración y cableado
Todos los cables, blindajes, soportes, etc. deberán ajustarse a las condiciones especificadas por los fabricantes de los distintos componentes de la UUT.
4.1.5. Sistema de refrigeración
La temperatura de todas las partes del sistema de máquina eléctrica deberá situarse dentro del intervalo permitido por el fabricante de componentes durante todo el tiempo que estén en funcionamiento en todos los ensayos realizados de conformidad con el presente anexo. En el caso de IEPC e IHPC de tipo 1, esto incluye también todos los demás componentes, como las cajas de cambios y los ejes que forman parte del IEPC o del IHPC de tipo 1.
4.1.5.1. Potencia de refrigeración durante las rondas de ensayo
4.1.5.1.1. Potencia de refrigeración para la medición de las limitaciones del par
En todas las rondas de ensayo realizadas de conformidad con el punto 4.2, excepto en el caso del EPMC de conformidad con el punto 4.2.6, el fabricante de componentes deberá declarar el número de circuitos de refrigeración usados con conexión a un intercambiador de calor externo. Para cada uno de estos circuitos con conexión a un intercambiador de calor externo se declararán los siguientes parámetros en la entrada del circuito de refrigeración respectivo de la UUT:
— | el flujo másico máximo del refrigerante o la presión máxima de entrada especificada por el fabricante de componentes, |
— | las temperaturas máximas admitidas del refrigerante especificadas por el fabricante de componentes, |
— | la potencia de refrigeración máxima disponible en el banco de ensayo. |
Estos valores declarados se documentarán en la ficha de características del componente respectivo.
Los siguientes valores reales se mantendrán por debajo de los valores máximos declarados y se registrarán para cada circuito de refrigeración con conexión a un intercambiador de calor externo, junto con los datos de los ensayos de todas las rondas de ensayo realizadas de conformidad con el punto 4.2, excepto para el EPMC de conformidad con el punto 4.2.6:
— | el flujo volumétrico o el flujo másico del refrigerante, |
— | la temperatura del refrigerante en la entrada del circuito de refrigeración de la UUT, |
— | la temperatura del refrigerante en la entrada y la salida del intercambiador de calor del banco de ensayo en el lado de la UUT. |
En todas las rondas de ensayo realizadas de acuerdo con el punto 4.2, la temperatura mínima del refrigerante en la entrada del circuito de refrigeración de la UUT, en el caso de refrigeración por líquido, será de 25 °C.
Cuando para los ensayos previstos en el presente anexo se utilicen otros fluidos distintos de los líquidos refrigerantes normales, estos no deberán sobrepasar los límites de temperatura definidos por el fabricante de componentes.
En el caso de refrigeración por líquido, la potencia de refrigeración máxima disponible en el banco de ensayo se determinará sobre la base del flujo másico de refrigerante, la diferencia de temperatura con respecto al intercambiador de calor del banco de ensayo en el lado de la UUT y la capacidad calorífica específica del refrigerante.
En la configuración del ensayo no se permitirá ningún ventilador adicional con el fin de enfriar activamente los componentes de la UUT.
4.1.6. Inversor
El inversor funcionará en el mismo modo y con los mismos ajustes que los especificados para las condiciones de utilización reales en el vehículo por el fabricante de componentes.
4.1.7. Condiciones ambientales en la celda de ensayo
Todos los ensayos deberán realizarse a una temperatura ambiente en la celda de ensayo de 25 ± 10 °C. La temperatura ambiente se medirá a una distancia de 1 m de la UUT.
4.1.8. Aceite lubricante para IEPC o IHPC de tipo 1
El aceite lubricante deberá cumplir las disposiciones definidas en los puntos 4.1.8.1 a 4.1.8.4 siguientes. Estas disposiciones no se aplicarán a los sistemas de máquina eléctrica.
4.1.8.1. Temperaturas del aceite
Las temperaturas del aceite se medirán en el centro del cárter del aceite o en cualquier otro punto adecuado de conformidad con las buenas prácticas técnicas.
En caso necesario, podrá utilizarse un sistema regulador auxiliar conforme al punto 4.1.8.4 para mantener las temperaturas dentro de los límites especificados por el fabricante de componentes.
En el caso de un acondicionamiento externo del aceite que se añada únicamente a efectos de ensayo, la temperatura del aceite podrá medirse en la línea de salida desde la caja de la UUT hasta el sistema de acondicionamiento 5 cm después de la salida. En ambos casos, la temperatura del aceite no superará el límite de temperatura especificado por el fabricante de componentes. Deberá facilitarse a la autoridad de homologación de tipo una justificación técnica sólida para explicar que el sistema externo de acondicionamiento de aceite no se utiliza para mejorar la eficiencia de la UUT. En el caso de los circuitos de aceite que no formen parte del circuito de refrigeración de ningún componente del sistema de máquina eléctrica ni estén conectados a tal circuito, la temperatura no excederá de 70 °C.
4.1.8.2. Calidad del aceite
Para la medición solo se utilizarán aceites de llenado en fábrica recomendados por el fabricante de componentes de la UUT.
4.1.8.3. Viscosidad del aceite
Si se especifican diferentes aceites para el llenado en fábrica, el fabricante de componentes elegirá un aceite cuya viscosidad cinemática (KV) a la misma temperatura esté dentro de un intervalo de ± 10 % de la viscosidad cinemática del aceite con la mayor viscosidad (dentro de la banda de tolerancia especificada para KV 100) para realizar las mediciones de la UUT relacionadas con la certificación.
4.1.8.4. Nivel y acondicionamiento del aceite
El nivel de aceite o el volumen de llenado deberán estar entre los niveles máximo y mínimo definidos en las especificaciones de mantenimiento del fabricante de componentes.
Se permitirá el uso de un sistema de filtrado y acondicionamiento externo del aceite. La caja de la UUT podrá ser modificada para incluir el sistema de acondicionamiento del aceite.
El sistema de acondicionamiento del aceite no se instalará de manera que permita cambiar los niveles de aceite de la UUT con el fin de aumentar la eficiencia o de generar pares de propulsión, de conformidad con las buenas prácticas técnicas.
4.1.9. Convenciones sobre los signos
4.1.9.1. Par y potencia
Los valores de par y potencia medidos deberán tener un signo positivo si la UUT acciona el dinamómetro y un signo negativo si la UUT lo frena (es decir, si es el dinamómetro el que acciona la UUT).
4.1.9.2. Corriente
Los valores de corriente medidos deberán tener un signo positivo si la UUT toma potencia eléctrica de la fuente de alimentación del inversor (o el convertidor CC/CC, si procede) y un signo negativo si la UUT suministra potencia eléctrica al inversor (o el convertidor CC/CC, si procede) y a la fuente de alimentación.
4.2. Rondas de ensayo que deben realizarse
El cuadro 2 define todas las rondas de ensayo que deben realizarse a efectos de la certificación de una familia concreta de sistemas de máquina eléctrica o de IEPC definida conforme al apéndice 13.
El ciclo de mapeo de la potencia eléctrica (EPMC) de conformidad con el punto 4.2.6 y la curva de resistencia de acuerdo con el punto 4.2.3 se omitirán para todos los demás miembros de una familia, excepto para el miembro de origen de la familia.
Cuando, a petición del fabricante de componentes, se aplique el artículo 15, apartado 5, del presente Reglamento, el EPMC de conformidad con el punto 4.2.6 y la curva de resistencia con arreglo al punto 4.2.3 se realizarán adicionalmente para esa máquina eléctrica o ese IEPC específicos.
Cuadro 2
Resumen de las rondas de ensayo que deben realizarse para los sistemas de máquina eléctrica o los IEPC
Ronda de ensayo | Referencia en este anexo | Niveles de tensión requeridos que deben realizarse (de conformidad con el punto 4.1.3) | Exigida para el miembro de origen | Exigida para otros miembros de la familia |
Límites máximo y mínimo de par | 4.2.2. | Vmin,Test y Vmax,Test | sí | sí |
Curva de resistencia | 4.2.3. | O bien Vmin,Test, o bien Vmax,Test | sí | no |
Par continuo máximo durante treinta minutos | 4.2.4. | Vmin,Test y Vmax,Test | sí | sí |
Características de sobrecarga | 4.2.5. | Vmin,Test y Vmax,Test | sí | sí |
EPMC | 4.2.6. | Vmin,Test y Vmax,Test | sí | no |
4.2.1. Disposiciones generales
Para la medición durante el ensayo, todas las temperaturas de la UUT se mantendrán dentro de los valores límite definidos por el fabricante de componentes.
Todos los ensayos deben realizarse con una funcionalidad de reducción de los valores especificados que dependerá de los límites de temperatura del sistema de máquina eléctrica plenamente activo. Cuando parámetros adicionales de otros sistemas situados fuera de los límites del sistema de máquina eléctrica influyan en el comportamiento de reducción en aplicaciones a bordo del vehículo, estos parámetros adicionales no se tendrán en cuenta en las rondas de ensayo realizadas de conformidad con el presente anexo.
En el caso de un sistema de máquina eléctrica, todos los valores de par y de velocidad indicados se referirán al árbol de rotación de la máquina eléctrica, salvo que se indique lo contrario.
En el caso de un IEPC, todos los valores del par y de la velocidad señalados se referirán al lado de salida de la caja de cambios o, si también se incluye un diferencial, al lado de salida de este, salvo que se indique lo contrario.
4.2.2. Ensayo de los límites máximo y mínimo de par
El ensayo mide las características de par máximo y mínimo de la UUT para verificar las limitaciones declaradas del sistema.
En el caso de un IEPC con caja de cambios de varias velocidades, el ensayo se realizará únicamente para la marcha con la relación de transmisión más cercana a 1. Cuando las relaciones de transmisión de dos marchas tengan la misma distancia respecto a una relación de transmisión de 1, el ensayo se realizará únicamente con la marcha con la mayor de las dos relaciones de transmisión.
4.2.2.1. Declaración de valores por parte del fabricante de componentes
El fabricante de componentes declarará los valores de par máximo y mínimo de la UUT en función de la velocidad de giro de la UUT entre 0 rpm y la velocidad máxima de funcionamiento de la UUT antes del ensayo. Esta declaración se hará por separado para cada uno de los dos niveles de tensión Vmin,Test y Vmax,Test.
4.2.2.2. Verificación de los límites máximos de par
La UUT se acondicionará (es decir, sin poner en funcionamiento el sistema) a una temperatura ambiente de 25 ± 10 °C durante un mínimo de 2 horas hasta el inicio de la ronda de ensayo. Si este ensayo se realiza directamente después de cualquier otra ronda de ensayo realizada de acuerdo con el presente anexo, el acondicionamiento durante un mínimo de 2 horas podrá omitirse o reducirse, siempre que la UUT permanezca en la celda de ensayo con la temperatura ambiente de dicha celda a 25 ± 10 °C.
Justo antes del inicio del ensayo, se hará funcionar la UUT en el banco de ensayo durante tres minutos a un 80 % de la potencia máxima a la velocidad recomendada por el fabricante de componentes.
El par de salida y la velocidad de giro de la UUT se medirán al menos a diez velocidades de rotación diferentes para definir correctamente la curva del par máximo entre la velocidad más baja y la más alta.
El fabricante de componentes especificará el punto de consigna de velocidad más bajo a una velocidad igual o inferior al 2 % de la velocidad máxima de funcionamiento de la UUT declarada por el fabricante de componentes de acuerdo con el punto 4.2.2.1. Cuando la configuración de ensayo no permita el funcionamiento del sistema en un punto de consigna de velocidad tan bajo, el fabricante de componentes especificará el punto de consigna de velocidad más bajo como la velocidad más baja que puede alcanzar la configuración específica del ensayo.
El punto de consigna de velocidad más alto se definirá mediante la velocidad máxima de funcionamiento de la UUT declarada por el fabricante de componentes de acuerdo con el punto 4.2.2.1.
Los ocho o más puntos de consigna de velocidad de giro restantes estarán situados entre los puntos de consigna de velocidad más bajo y más alto y serán especificados por el fabricante de componentes. El intervalo entre dos puntos de consigna de velocidad adyacentes no deberá ser superior al 15 % de la velocidad máxima de funcionamiento de la UUT declarada por el fabricante de componentes.
Todos los puntos de funcionamiento se mantendrán durante un tiempo de funcionamiento de al menos tres segundos. El par de salida y la velocidad de giro de la UUT se registrarán como el valor medio del último segundo de la medición. El ensayo completo se efectuará en el plazo de cinco minutos.
4.2.2.3. Verificación de los límites mínimos de par
La UUT se acondicionará (es decir, sin poner en funcionamiento el sistema) a una temperatura ambiente de 25 ± 10 °C durante un mínimo de 2 horas hasta el inicio de la ronda de ensayo. Si este ensayo se realiza directamente después de cualquier otra ronda de ensayo realizada de acuerdo con el presente anexo, el acondicionamiento durante un mínimo de 2 horas podrá omitirse o reducirse, siempre que la UUT permanezca en la celda de ensayo con la temperatura ambiente de dicha celda a 25 ± 10 °C.
Justo antes del inicio del ensayo, se hará funcionar la UUT en el banco de ensayo durante tres minutos a un 80 % de la potencia máxima a la velocidad recomendada por el fabricante de componentes.
El par de salida y la velocidad de giro de la UUT se medirán a las mismas velocidades de giro seleccionadas en el punto 4.2.2.2.
Todos los puntos de funcionamiento se mantendrán durante un tiempo de funcionamiento de al menos tres segundos. El par de salida y la velocidad de giro de la UUT se registrarán como el valor medio del último segundo de la medición. El ensayo completo se efectuará en el plazo de cinco minutos.
4.2.2.4. Interpretación de los resultados
Los valores del par máximo de la UUT declarados por el fabricante de componentes de acuerdo con el punto 4.2.2.1 se aceptarán como valores finales si no son superiores al + 2 % para el par máximo global ni al + 4 % en los demás puntos de medición, con una tolerancia de ± 2 % para las velocidades de giro con respecto a los valores medidos de acuerdo con el punto 4.2.2.2.
Cuando los valores del par máximo declarados por el fabricante de componentes superen los límites definidos anteriormente, se utilizarán como valores finales los valores reales medidos.
Cuando los valores del par máximo de la UUT declarados por el fabricante de componentes de acuerdo con el punto 4.2.2.1 sean inferiores a los valores medidos de acuerdo con el punto 4.2.2.2, se utilizarán como valores finales los valores declarados por el fabricante de componentes.
Los valores del par mínimo de la UUT declarados por el fabricante de componentes de acuerdo con el punto 4.2.2.1 se aceptarán como valores finales si no son inferiores al – 2 % para el par máximo global ni al – 4 % en los demás puntos de medición, con una tolerancia de ± 2 % para las velocidades de giro con respecto a los valores medidos de acuerdo con el punto 4.2.2.3.
Cuando los valores del par mínimo declarados por el fabricante de componentes superen los límites definidos anteriormente, se utilizarán como valores finales los valores reales medidos.
Cuando los valores del par mínimo de la UUT declarados por el fabricante de componentes de acuerdo con el punto 4.2.2.1 sean superiores a los valores medidos de acuerdo con el punto 4.2.2.3, se utilizarán como valores finales los valores declarados por el fabricante de componentes.
4.2.3. Ensayo de la curva de resistencia
El ensayo mide las pérdidas de resistencia en la UUT, es decir, la potencia mecánica o eléctrica necesaria para hacer girar el sistema a una determinada velocidad mediante fuentes de energía externas.
La UUT se acondicionará (es decir, sin poner en funcionamiento el sistema) a una temperatura ambiente de 25 ± 10 °C durante un mínimo de 2 horas. Si este ensayo se realiza directamente después de cualquier otra ronda de ensayo realizada de acuerdo con el presente anexo, el acondicionamiento durante un mínimo de 2 horas podrá omitirse o reducirse, siempre que la UUT permanezca en la celda de ensayo con la temperatura ambiente de dicha celda a 25 ± 10 °C.
Justo antes del inicio del ensayo real, se podrá hacer funcionar opcionalmente la UUT en el banco de ensayo durante tres minutos a un 80 % de la potencia máxima a la velocidad recomendada por el fabricante de componentes.
El ensayo real se llevará a cabo de acuerdo con una de las opciones siguientes:
— | Opción A: el árbol de salida de la UUT se conectará a una máquina de carga (es decir, un dinamómetro) y la máquina de carga (es decir, el dinamómetro) accionará la UUT a la velocidad de giro deseada. El suministro de potencia eléctrica al inversor (o el convertidor CC/CC, si procede) o los cables de fase de corriente alterna entre la máquina eléctrica y el inversor podrán estar inactivos o desconectados. |
— | Opción B: el árbol de salida de la UUT no se conectará a una máquina de carga (es decir, un dinamómetro) y la UUT funcionará a la velocidad de giro deseada mediante potencia eléctrica suministrada al inversor (o convertidor CC/CC, si procede). |
— | Opción C: el árbol de salida de la UUT se conectará a una máquina de carga (es decir, un dinamómetro) y la UUT se hará funcionar a la velocidad de giro deseada, bien mediante la máquina de carga (es decir, un dinamómetro), bien mediante la potencia eléctrica suministrada al inversor (o convertidor CC/CC, si procede), bien mediante una combinación de ambas. |
El ensayo se realizará al menos a las mismas velocidades de giro seleccionadas en el punto 4.2.2.2 y podrán añadirse más puntos de funcionamiento a otras velocidades de giro. Todos los puntos de funcionamiento se mantendrán funcionando al menos diez segundos y durante ese tiempo la velocidad de giro real de la UUT deberá estar dentro de un margen de ± 2 % del valor de consigna de la velocidad de giro.
Los siguientes valores se registrarán como valor medio durante los últimos cinco segundos de la medición, en función de la opción de ensayo elegida:
— | para las opciones B y C anteriores: la potencia eléctrica del inversor (o del convertidor CC/CC, si procede), |
— | para las opciones A y C anteriores: el par de la máquina de carga (es decir, el dinamómetro) aplicado a los árboles de salida de la UUT, |
— | para todas las opciones: la velocidad de giro de la UUT. |
Si la UUT es un IEPC con caja de cambios de varias velocidades, el ensayo se realizará para la marcha con la relación de transmisión más cercana a 1. Cuando las relaciones de transmisión de dos marchas tengan la misma distancia respecto a una relación de transmisión de 1, el ensayo se realizará únicamente con la marcha con la mayor de las dos relaciones de transmisión.
Además, el ensayo podrá realizarse también para todas las demás marchas hacia delante del IEPC, de modo que se determine un conjunto de datos específico para cada marcha hacia delante del IEPC.
4.2.4. Ensayo del par continuo máximo durante treinta minutos
El ensayo mide el par continuo máximo durante treinta minutos que puede conseguirse con la UUT por término medio a lo largo de 1 800 segundos.
En el caso de un IEPC con caja de cambios de varias velocidades, el ensayo se realizará únicamente para la marcha con la relación de transmisión más cercana a 1. Cuando las relaciones de transmisión de dos marchas tengan la misma distancia respecto a una relación de transmisión de 1, el ensayo se realizará únicamente con la marcha con la mayor de las dos relaciones de transmisión.
4.2.4.1. Declaración de valores por parte del fabricante de componentes
El fabricante de componentes declarará los valores correspondientes al par continuo máximo durante treinta minutos de la UUT, así como la velocidad de giro correspondiente antes del ensayo. La velocidad de giro se situará en un intervalo en el que la potencia mecánica sea superior al 90 % de la potencia máxima global determinada a partir de los datos del límite de par máximo registrados de conformidad con el punto 4.2.2 para el nivel de tensión respectivo. Esta declaración se hará por separado para cada uno de los dos niveles de tensión Vmin,Test y Vmax,Test.
4.2.4.2. Verificación del par continuo máximo durante treinta minutos
La UUT se acondicionará (es decir, sin poner en funcionamiento el sistema) a una temperatura ambiente de 25 ± 10 °C durante un mínimo de 4 horas. Si este ensayo se realiza directamente después de cualquier otra ronda de ensayo realizada de acuerdo con el presente anexo, el acondicionamiento durante un mínimo de 4 horas podrá omitirse o reducirse, siempre que la UUT permanezca en la celda de ensayo con la temperatura ambiente de dicha celda a 25 ± 10 °C.
La UUT se hará funcionar con el punto de consigna del par y de la velocidad que corresponda al par continuo máximo durante treinta minutos declarado por el fabricante de componentes de acuerdo con el punto 4.2.4.1 durante un período total de 1 800 segundos.
El par de salida y la velocidad de giro de la UUT, así como la potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede) se medirán a lo largo de este período de 1 800 segundos. El valor de la potencia mecánica medido a lo largo del tiempo deberá situarse en un intervalo de ± 5 % del valor de potencia mecánica declarado por el fabricante de componentes de acuerdo con el punto 4.2.4.1, y la velocidad de giro deberá situarse dentro de un margen de ± 2 % del valor declarado por el fabricante de componentes de acuerdo con el punto 4.2.4.1. El par continuo máximo durante treinta minutos es la media del par de salida en el período de medición de 1 800 segundos. La velocidad de giro correspondiente es la media de la velocidad de giro en el período de medición de 1 800 segundos.
4.2.4.3. Interpretación de los resultados
Los valores declarados por el fabricante de componentes de acuerdo con el punto 4.2.4.1 se aceptarán como valores finales si no difieren en más de un + 4 % por par, con una tolerancia de ± 2 % para la velocidad de giro con respecto a los valores medidos de acuerdo con el punto 4.2.4.2.
Cuando los valores declarados por el fabricante de componentes superen los límites definidos anteriormente, se repetirán los requisitos mencionados en los puntos 4.2.4.1 a 4.2.4.3 con valores diferentes para el par continuo máximo durante treinta minutos o la velocidad de giro correspondiente.
Cuando el valor del par declarado por el fabricante de componentes de acuerdo con el punto 4.2.4.1 sea inferior al valor medio de par de acuerdo con el punto 4.2.4.2, con una tolerancia de ± 2 % para la velocidad de giro, se utilizarán como valores finales los valores declarados por el fabricante de componentes.
Además, se calculará la media de la potencia eléctrica real medida hacia o desde el inversor (o el convertidor CC/CC, si procede) durante el período de medición de 1 800 segundos. También se calculará la potencia continua media durante treinta minutos a partir de los valores finales de par continuo máximo durante treinta minutos y la correspondiente velocidad de giro media.
4.2.5. Ensayo de las características de sobrecarga
El ensayo mide la duración de la capacidad de la UUT para proporcionar el par de salida máximo a fin de deducir las características de sobrecarga del sistema.
En el caso de un IEPC con caja de cambios de varias velocidades, el ensayo se realizará únicamente para la marcha con la relación de transmisión más cercana a 1. Cuando las relaciones de transmisión de dos marchas tengan la misma distancia respecto a una relación de transmisión de 1, el ensayo se realizará únicamente con la marcha con la mayor de las dos relaciones de transmisión.
4.2.5.1. Declaración de valores por parte del fabricante de componentes
El fabricante de componentes declarará el valor correspondiente al par de salida máximo de la UUT a la velocidad de giro específica elegida para el ensayo, así como la velocidad de giro correspondiente antes del ensayo. La velocidad de giro correspondiente será el mismo punto de consigna de velocidad utilizado para la medición realizada de conformidad con el punto 4.2.4.2 para el nivel de tensión respectivo. El valor declarado del par de salida máximo de la UUT deberá ser igual o superior al valor del par continuo máximo durante treinta minutos determinado de acuerdo con el punto 4.2.4.3 para el nivel de tensión respectivo.
Además, el fabricante de componentes deberá declarar un período de t0_maxP durante el cual pueda alcanzarse constantemente el par de salida máximo de la UUT a partir de las condiciones establecidas en el punto 4.2.5.2. Esta declaración se hará por separado para cada uno de los dos niveles de tensión Vmin,Test y Vmax,Test.
4.2.5.2. Verificación del par máximo de salida
La UUT se acondicionará (es decir, sin poner en funcionamiento el sistema) a una temperatura ambiente de 25 ± 10 °C durante un mínimo de 2 horas. Si este ensayo se realiza directamente después de cualquier otra ronda de ensayo realizada de acuerdo con el presente anexo, el acondicionamiento durante un mínimo de 2 horas podrá omitirse o reducirse, siempre que la UUT permanezca en la celda de ensayo con la temperatura ambiente de dicha celda a 25 ± 10 °C.
Justo antes de comenzar el ensayo, se hará funcionar la UUT en el banco de ensayo durante treinta minutos con el 50 % del par continuo máximo durante treinta minutos en el respectivo punto de consigna de velocidad determinado de acuerdo con el punto 4.2.4.3.
Entonces se hará funcionar la UUT con el punto de consigna del par y de la velocidad que corresponda al par continuo máximo de salida declarado por el fabricante de componentes de acuerdo con el punto 4.2.5.1.
El par de salida y la velocidad de giro de la UUT, así como la tensión de entrada de corriente continua al inversor (o al convertidor CC/CC, si procede) y la potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede) se medirán a lo largo de un período de t0_maxP declarado por el fabricante de componentes de acuerdo con el punto 4.2.5.1.
4.2.5.3. Interpretación de los resultados
Los valores registrados de par y velocidad a lo largo del tiempo medidos de acuerdo con el punto 4.2.5.2 se aceptarán si no difieren en más de ± 2 % para el par y de ± 2 % para la velocidad de giro de los valores declarados por el fabricante de componentes de acuerdo con el punto 4.2.5.1 durante todo el período de t0_maxP.
Cuando los valores declarados por el fabricante de componentes estén fuera de las tolerancias definidas en el párrafo primero del presente punto, se repetirán los procedimientos establecidos en los puntos 4.2.5.1 y 4.2.5.2 y en el presente punto con valores diferentes para el par de salida máximo de la UUT o el período de t0_maxP.
La media de los valores medidos reales durante el período de t0_maxP calculada para las diferentes señales de velocidad de giro, par y tensión de entrada CC al inversor (o convertidor CC/CC, si procede) se utilizará como valor final para la caracterización del punto de sobrecarga. Además, se calculará la media de la potencia eléctrica real medida hacia o desde el inversor (o el convertidor CC/CC, si procede) durante el período de t0_maxP.
4.2.6. Ensayo EPMC
El ensayo EPMC mide la potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede) para diferentes puntos de funcionamiento de la UUT.
4.2.6.1. Preacondicionamiento
La UUT se acondicionará (es decir, sin poner en funcionamiento el sistema) a una temperatura ambiente de 25 ± 10 °C durante un mínimo de 2 horas. Si este ensayo se realiza directamente después de cualquier otra ronda de ensayo realizada de acuerdo con el presente anexo, el acondicionamiento durante un mínimo de 2 horas podrá omitirse o reducirse, siempre que la UUT permanezca en la celda de ensayo con la temperatura ambiente de dicha celda a 25 ± 10 °C.
4.2.6.2. Puntos de funcionamiento que deben medirse
En el caso de un IEPC con caja de cambios de varias velocidades, los puntos de consigna para la velocidad de giro de conformidad con el punto 4.2.6.2.1 y para el par con arreglo al punto 4.2.6.2.2 se determinarán para cada marcha hacia delante.
4.2.6.2.1. Puntos de consigna para la velocidad de giro
Los puntos de consigna de un sistema de máquina eléctrica independiente o de un IEPC sin marchas variables se definirán de conformidad con las disposiciones siguientes:
a) | Como puntos de consigna para la velocidad de giro de la UUT, se utilizarán los mismos puntos de consigna utilizados para la medición realizada de conformidad con el punto 4.2.2.2 para el nivel de tensión respectivo. |
b) | Además de los puntos de consigna definidos en la letra a), se utilizará el punto de consigna de velocidad para la verificación del par continuo máximo durante treinta minutos realizada de conformidad con el punto 4.2.4.2 para el nivel de tensión respectivo. |
c) | Podrán definirse otros puntos de consigna de velocidad además de los definidos en las letras a) y b). |
En el caso de un IEPC con caja de cambios de varias velocidades, se definirá un conjunto de datos separado de puntos de consigna para la velocidad de giro de la UUT para cada marcha hacia delante con arreglo a las siguientes disposiciones:
d) | Los puntos de consigna de velocidad de giro para la marcha con la relación de transmisión más cercana a 1 (cuando las relaciones de transmisión de dos marchas tengan la misma distancia a una relación de transmisión de 1, el ensayo se realizará únicamente con la marcha con la mayor de las dos relaciones de transmisión) determinados de conformidad con las letras a) a c), nk,gear_iCT1, se utilizarán como base para la etapa siguiente correspondiente a la letra e). |
e) | Estos puntos de consigna de velocidad de giro se convertirán a los respectivos puntos de consigna de todas las demás marchas mediante la ecuación siguiente: nk,gear = nk,gear_iCT1 × igear_iCT1 / igear donde:
|
4.2.6.2.2. Puntos de consigna del par
Los puntos de consigna de un sistema de máquina eléctrica independiente o de un IEPC sin marchas variables se definirán de conformidad con las disposiciones siguientes:
a) | Para la medición se definirán al menos diez puntos de consigna del par de la UUT, situados tanto en el lado positivo (es decir, el lado del accionamiento) como en el negativo (es decir, el del frenado). El punto de consigna de par más bajo y el más alto se definirán sobre la base de los límites de par mínimo y máximo determinados de conformidad con el punto 4.2.2.4 para el nivel de tensión respectivo, donde el punto de consigna de par más bajo será el par mínimo global, Tmin_overall, y el punto de consigna de par más alto será el par máximo global, Tmax_overall, determinados a partir de estos valores. |
b) | Los ocho o más puntos de consigna de par restantes estarán situados entre el punto de consigna de par más bajo y el más alto. El intervalo entre dos puntos de consigna de par adyacentes no será superior al 22,5 % del par máximo global de la UUT determinado de acuerdo con el punto 4.2.2.4 para el nivel de tensión respectivo. |
c) | El valor límite para el par positivo a una velocidad de giro determinada será el límite de par máximo en este punto de consigna de velocidad de giro determinado de conformidad con el punto 4.2.2.4 para el nivel de tensión respectivo, menos el 5 % de Tmax_overall. Todos los puntos de consigna de par en un determinado punto de consigna de velocidad de giro que estén situados por encima del valor límite de par positivo a esta velocidad de giro concreta se sustituirán por un único punto de consigna de par deseado situado en el límite de par máximo en ese punto de consigna de velocidad de giro concreto. |
d) | El valor límite para el par negativo a una velocidad de giro determinada será el límite de par mínimo en este punto de consigna de velocidad de giro determinado de conformidad con el punto 4.2.2.4 para el nivel de tensión respectivo, menos el 5 % de Tmin_overall. Todos los puntos de consigna de par en un determinado punto de consigna de velocidad de giro que estén situados por debajo del valor límite de par negativo a esta velocidad de giro concreta se sustituirán por un único punto de consigna de par deseado situado en el límite de par mínimo en ese punto de consigna de velocidad de giro concreto. |
e) | Las limitaciones de par mínimo y máximo para un determinado punto de consigna de velocidad de giro se determinarán sobre la base de los datos generados de conformidad con el punto 4.2.2.4 para el nivel de tensión respectivo, utilizando interpolación lineal. |
En el caso de un IEPC con caja de cambios de varias velocidades, se definirá un conjunto de datos separado de puntos de consigna para el par de la UUT para cada marcha con arreglo a las siguientes disposiciones:
f) | Los puntos de consigna del par para la marcha con la relación de transmisión más cercana a 1 (cuando las relaciones de transmisión de dos marchas tengan la misma distancia a una relación de transmisión de 1, el ensayo se realizará únicamente con la marcha con la mayor de las dos relaciones de transmisión) determinados de conformidad con las letras a) a e), Tj,gear_iCT1, se utilizarán como base para la etapa siguiente correspondiente a las letras g) y h). |
g) | Estos puntos de consigna de par se convertirán a los respectivos puntos de consigna de todas las demás marchas mediante la ecuación siguiente: Tj,gear = Tj,gear_iCT1 / igear_iCT1 × igear donde:
|
h) | No será necesario medir los puntos de consigna de par Tj,gear con un valor absoluto superior a 10 kNm durante la ronda de ensayo real realizada de conformidad con el punto 4.2.6.4. |
4.2.6.3. Señales que deben medirse
En los puntos de funcionamiento especificados de conformidad con el punto 4.2.6.2 se medirán la potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede) y el par y la velocidad de salida de la UUT.
4.2.6.4. Secuencia de ensayo
La secuencia de ensayo consiste en puntos de consigna en condiciones estables con la velocidad de giro y el par definidos en cada punto de consigna de conformidad con el punto 4.2.6.2.
En caso de que se produzca una interrupción imprevista, la secuencia de ensayo podrá continuar con arreglo a las siguientes disposiciones:
— | la UUT permanece en la celda de ensayo, manteniéndose la temperatura ambiente en dicha celda a 25 ± 10 °C; |
— | antes de continuar el ensayo, la UUT se hará funcionar en el banco para su calentamiento de acuerdo con las recomendaciones del fabricante de componentes; |
— | tras el calentamiento, la secuencia de ensayo continuará en el punto de consigna de velocidad de giro inmediatamente inferior a aquel en el que se produjo la interrupción; |
— | en el punto de consigna de velocidad de giro inmediatamente inferior se seguirá la secuencia de ensayo descrita en las letras a) a m) que se indican a continuación, pero solo con fines de preacondicionamiento sin registrar ningún dato de medición; |
— | el registro de los datos de medición se efectuará a partir del primer punto de funcionamiento en el punto de consigna de velocidad de giro en el que se produjo la interrupción. |
En el caso de un IEPC, se aplicarán las disposiciones siguientes:
— | la secuencia de ensayo se llevará a cabo para cada marcha secuencialmente, empezando por la marcha con la relación de transmisión más elevada y continuando con las marchas en orden decreciente de relación de transmisión; |
— | todos los puntos de consigna dentro de un conjunto de datos para una marcha específica determinados de conformidad con el punto 4.2.6.2 se completarán antes de continuar la medición en una marcha diferente; |
— | se permite interrumpir el ensayo una vez finalizada la medición para cada marcha específica; |
— | se permite el uso de diferentes medidores de par. |
Justo antes de empezar el ensayo en el primer punto de consigna, la UUT se hará funcionar en el banco para su calentamiento de acuerdo con las recomendaciones del fabricante de componentes. El primer punto de consigna de velocidad de giro para la marcha real medida con el que se inicia el ensayo de EPMC se define en el punto de consigna de velocidad de giro más bajo.
Los puntos de consigna restantes para la marcha real medida se aplicarán en el orden siguiente:
a) | El primer punto de funcionamiento en un punto de consigna de velocidad de giro determinado se define con el par más alto a esta velocidad específica. |
b) | El siguiente punto de funcionamiento se fijará a la misma velocidad y en el punto de consigna de par más bajo positivo (es decir, de accionamiento). |
c) | El siguiente punto de funcionamiento se fijará a la misma velocidad y en el segundo punto de consigna de par más alto positivo (es decir, de accionamiento). |
d) | El siguiente punto de funcionamiento se fijará a la misma velocidad y en el segundo punto de consigna de par más bajo positivo (es decir, de accionamiento). |
e) | Este orden de pasar del punto de consigna de par más alto al más bajo restante se mantendrá hasta que se midan todos los puntos de consigna de par positivos (es decir, de accionamiento) en un determinado punto de consigna de velocidad de giro. |
f) | Antes de continuar con el paso g), la UUT podrá enfriarse de acuerdo con las recomendaciones del fabricante de componentes funcionando en un punto de consigna concreto definido por dicho fabricante. |
g) | A continuación, se medirán los puntos de consigna de par negativo (es decir, de frenado) en el mismo punto de consigna de velocidad de giro, partiendo del par más bajo a esta velocidad específica. |
h) | El siguiente punto de funcionamiento se fijará a la misma velocidad y en el punto de consigna de par más alto negativo (es decir, de frenado). |
i) | El siguiente punto de funcionamiento se fijará a la misma velocidad y en el segundo punto de consigna de par más bajo negativo (es decir, de frenado). |
j) | El siguiente punto de funcionamiento se fijará a la misma velocidad y en el segundo punto de consigna de par más alto negativo (es decir, de frenado). |
k) | Este orden de pasar del punto de consigna de par más bajo al más alto restante se mantendrá hasta que se midan todos los puntos de consigna de par negativos (es decir, de frenado) en un determinado punto de consigna de velocidad de giro. |
l) | Antes de continuar con el paso m), la UUT podrá enfriarse de acuerdo con las recomendaciones del fabricante de componentes funcionando en un punto de consigna concreto definido por dicho fabricante. |
m) | El ensayo continuará en el punto de consigna de velocidad de giro inmediatamente superior, repitiendo las etapas a) a m) de la secuencia de ensayo definida, hasta que se hayan completado todos los puntos de consigna de velocidad de giro correspondientes a la marcha realmente medida. |
Todos los puntos de funcionamiento se mantendrán durante un tiempo de funcionamiento de al menos cinco segundos. Durante este tiempo de funcionamiento, la velocidad de giro de la UUT se mantendrá en el punto de consigna de velocidad de giro, con una tolerancia de ± 1 % o 20 rpm, lo que sea mayor. Además, durante este tiempo de funcionamiento, excepto en el punto de consigna de par más alto y más bajo en cada punto de consigna de velocidad de giro, el par se mantendrá en el punto de consigna de par con una tolerancia de ± 1 % o ± 5 Nm, lo que sea mayor, respecto del punto de consigna de par.
La potencia eléctrica hacia o desde el inversor (o el convertidor CC/CC, si procede), el par de salida y la velocidad de giro de la UUT se registrarán como valor medio durante los dos últimos segundos del tiempo de funcionamiento.
4.3. Postratamiento de los datos de medición de la UUT
4.3.1. Disposiciones generales para el postratamiento
Todas las etapas del postratamiento definidas en los puntos 4.3.2 a 4.3.6 se llevarán a cabo para los conjuntos de datos medidos para los dos niveles de tensión diferentes de conformidad con el punto 4.1.3 por separado.
4.3.2. Límites máximo y mínimo de par
Los datos relativos a los límites máximo y mínimo de par determinados de acuerdo con el punto 4.2.2.4 se ampliarán mediante extrapolación lineal (utilizando los dos puntos más cercanos) a la velocidad de giro cero y a la velocidad máxima de funcionamiento de la UUT declarada por el fabricante de componentes en caso de que los datos de medición registrados no cubran estos intervalos.
4.3.3. Curva de resistencia
Los datos de la curva de resistencia, determinados de acuerdo con el punto 4.2.3, se modificarán de acuerdo con las disposiciones siguientes:
1) | Cuando la alimentación eléctrica del inversor (o, en su caso, el convertidor CC/CC) esté inactiva o desconectada, los valores respectivos de potencia eléctrica al inversor (o, en su caso, al convertidor CC/CC) se ajustarán en 0. |
2) | Cuando el árbol de salida de la UUT no esté conectado a la máquina de carga (es decir, el dinamómetro), los valores de par respectivos se ajustarán en 0. |
3) | Los datos modificados con arreglo a los subpuntos 1 y 2 se ampliarán mediante extrapolación lineal a la velocidad máxima de funcionamiento de la UUT declarada por el fabricante de componentes cuando los datos de medición registrados no cubran estos intervalos. |
4) | Los valores de potencia eléctrica al inversor (o convertidor CC/CC, si procede) modificados de conformidad con los subpuntos 1 a 3 se considerarán pérdidas de potencia mecánica virtuales. Estos valores de pérdidas de potencia mecánica virtuales se convertirán en par de resistencia virtual con la velocidad de giro respectiva del árbol de salida de la UUT. |
5) | En cada punto de consigna de la velocidad de giro del árbol de salida de la UUT en los datos modificados de acuerdo con los subpuntos 1 a 3, el valor del par de resistencia virtual determinado de acuerdo con el subpunto 4 se añadirá al par real de la máquina de carga (es decir, el dinamómetro) para definir el par de resistencia total de la UUT en función de la velocidad de giro. |
6) | Los valores del par de resistencia total de la UUT en el punto de consigna de velocidad de giro más bajo, determinados a partir de los datos modificados de acuerdo con el subpunto 5, se copiarán en una nueva entrada a una velocidad de giro de 0 rpm y se añadirán a los datos modificados de conformidad con el subpunto 5. |
4.3.4. EPMC
Los datos del EPMC determinados de conformidad con el punto 4.2.6.4 se ampliarán con arreglo a las disposiciones siguientes para cada marcha hacia delante medida por separado:
1) | Los valores de todos los pares de datos para el par de salida y la potencia eléctrica del inversor determinados en el punto de consigna de velocidad de giro más bajo se copiarán en una nueva entrada a velocidad de giro cero. |
2) | Los valores de todos los pares de datos para el par de salida y la potencia eléctrica del inversor determinados en el punto de consigna de velocidad de giro más elevado se copiarán en una nueva entrada en el punto de consigna de la velocidad de giro más elevado multiplicados por 1,05. |
3) | Si en un punto de consigna de velocidad de giro específico (incluidos los nuevos datos introducidos de los subpuntos 1 y 2) se omite un punto de consigna de par determinado de conformidad con las disposiciones del punto 4.2.6.2.2, letras a) a g), para la medición real de conformidad con el punto 4.2.6.2.2, letra h), se calculará un nuevo punto de datos sobre la base de las siguientes disposiciones:
|
4) | En cada punto de consigna de velocidad de giro (incluidos los nuevos datos introducidos de los subpuntos 1 a 3) se calculará un nuevo punto de datos sobre la base de los datos del punto de consigna de par más alto de conformidad con las siguientes reglas:
|
5) | En cada punto de consigna de velocidad de giro (incluidos los nuevos datos introducidos de los subpuntos 1 a 3) se calculará un nuevo punto de datos sobre la base de los datos del punto de consigna de par más bajo de conformidad con las siguientes reglas:
|
4.3.5. Características de sobrecarga
A partir de los datos relativos a las características de sobrecarga determinados de acuerdo con el punto 4.2.5.3, se determinará una cifra de eficiencia dividiendo la potencia mecánica de salida media durante el período t0_maxP por la potencia eléctrica media hacia o desde el inversor (o el convertidor CC/CC, si procede) durante dicho período.
4.3.6. Par continuo máximo durante treinta minutos
A partir de los datos determinados de acuerdo con el punto 4.2.4.3, se determinará una cifra de eficiencia dividiendo la potencia continua media durante treinta minutos por la potencia eléctrica media hacia o desde el inversor (o el convertidor CC/CC, si procede).
A partir de los datos de medición del par continuo máximo durante treinta minutos determinados de conformidad con el punto 4.2.4.2, los siguientes valores medios se determinarán a partir de los valores de resolución temporal durante el período de medición de 1 800 segundos para cada circuito de refrigeración con conexión a un intercambiador de calor externo por separado:
— | la potencia de refrigeración, |
— | la temperatura del refrigerante en la entrada del circuito de refrigeración de la UUT. |
La potencia de refrigeración se determinará sobre la base de la capacidad calorífica específica del refrigerante, el flujo másico del refrigerante y la diferencia de temperatura con respecto al intercambiador de calor del banco de ensayo en el lado de la UUT.
4.4. Disposiciones especiales para los ensayos de IHPC de tipo 1
Los IHPC de tipo 1 se dividen virtualmente en dos componentes separados para la manipulación en la herramienta de simulación, a saber, un sistema de máquina eléctrica y una transmisión. Por lo tanto, se determinarán dos conjuntos separados de datos de componentes siguiendo las disposiciones descritas en el presente punto.
Para los ensayos de componentes de IHPC de tipo 1, serán de aplicación los puntos 4.1 y 4.2 del presente anexo.
En el caso de un IHPC de tipo 1, el par y la velocidad se medirán en el árbol de salida del sistema (es decir, el lado de salida de la caja de cambios hacia las ruedas del vehículo).
No se permitirá la definición de familias de conformidad con el apéndice 13 para los IHPC de tipo 1. Por lo tanto, no se permite la omisión de rondas de ensayo y se deberán realizar todas las rondas de ensayo descritas en el punto 4.2 con un IHPC de tipo 1 específico. A pesar de estas disposiciones, se omitirá el ensayo de la curva de resistencia con arreglo al punto 4.2.3 en el caso de los IHPC de tipo 1.
No se permitirá generar datos de entrada para los IHPC de tipo 1 sobre la base de valores normalizados.
4.4.1. Rondas de ensayo que deben realizarse con los IHPC de tipo 1
4.4.1.1. Rondas de ensayo para determinar las características del sistema completo
En este subpunto se describen los detalles para determinar las características del IHPC tipo 1 completo, incluidas las pérdidas correspondientes a la caja de cambios integrada en el sistema.
Las siguientes rondas de ensayo se llevarán a cabo de conformidad con las disposiciones definidas para los IEPC con caja de cambios de varias velocidades en los puntos respectivos. En todas estas rondas de ensayo, el árbol de entrada destinado a proporcionar el par de propulsión al sistema se desconectará y girará libremente o quedará fijo sin girar.
Cuadro 2 bis
Rondas de ensayo que deben realizarse para IHPC de tipo 1
Ronda de ensayo | Referencia en este anexo |
Límites máximo y mínimo de par | 4.2.2 |
Par continuo máximo durante treinta minutos | 4.2.4 |
Características de sobrecarga | 4.2.5 |
EPMC | 4.2.6 |
Debido a la aplicabilidad de las disposiciones definidas para el IEPC con caja de cambios de varias velocidades a los IHPC de tipo 1, el EPMC se medirá para cada marcha hacia delante de conformidad con el punto 4.2.6.2.
4.4.1.2. Rondas de ensayo para determinar las pérdidas correspondientes a la caja de cambios dentro del sistema
En este subpunto se describen los detalles para determinar las pérdidas correspondientes a la caja de cambios dentro del sistema.
Por tanto, el sistema se someterá a ensayo con arreglo a lo dispuesto en el punto 3.3 del anexo VI. A pesar de estas disposiciones, se aplicarán las disposiciones siguientes:
— | El árbol de entrada que proporciona el par de propulsión al sistema se conectará a un dinamómetro que lo accionará con arreglo a lo dispuesto en el punto 3.3 del anexo VI. |
— | Se desconectará la alimentación eléctrica de la fuente de alimentación de corriente continua a los inversores (o convertidores CC/CC, si procede). A fin de permitir esta desconexión sin que ninguna parte del sistema resulte dañada, el sistema podrá modificarse de manera que se utilicen imanes o rotores ficticios para la medición en la parte de las máquinas eléctricas. |
— | El intervalo de par definido en el punto 3.3.6.3 del anexo VI se ampliará para abarcar también los valores de par negativos, de manera que los mismos puntos de consigna de par del lado positivo se midan también con un signo algebraico negativo. |
4.4.2. Postratamiento de los datos de medición de IHPC de tipo 1
Para el postratamiento de los datos de medición de IHPC de tipo 1, se aplicarán todas las disposiciones establecidas en el punto 4.3, salvo que se indique lo contrario.
4.4.2.1. Postratamiento de los datos relativos a las características del sistema completo
Todos los datos de medición determinados de conformidad con el punto 4.4.1.1 se tratarán de conformidad con lo dispuesto en los puntos 4.3.1 a 4.3.6. Se omitirán las disposiciones del punto 4.3.3, ya que la medición de la curva de resistencia con arreglo al punto 4.2.3 no se realiza en el caso de los IHPC de tipo 1. Cuando existan disposiciones específicas para IEPC con caja de cambios de varias velocidades en los puntos respectivos, se aplicarán dichas disposiciones específicas.
4.4.2.2. Postratamiento de los datos relativos a las pérdidas correspondientes a la caja de cambios dentro del sistema
Todos los datos de medición determinados de conformidad con el punto 4.4.1.2 se tratarán de conformidad con lo dispuesto en el punto 3.4 del anexo VI. A pesar de estas disposiciones, se aplicarán las disposiciones siguientes:
— | Las disposiciones establecidas en los puntos 3.4.2 a 3.4.5 del anexo VI también se aplicarán por analogía a los valores de par negativos. |
— | No se aplicarán las disposiciones establecidas en el punto 3.4.6 del anexo VI. |
4.4.2.3. Postratamiento de los datos para obtener los datos específicos del sistema de máquina eléctrica virtual
Para determinar los datos de los componentes del sistema de máquina eléctrica virtual se aplicarán los siguientes pasos. Se omitirán las siguientes etapas de postratamiento para las dos cifras de eficiencia determinadas con arreglo a los puntos 4.3.5 y 4.3.6, ya que estas cifras de eficiencia solo sirven para evaluar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas.
a) | Todos los valores de velocidad y de par de los datos de medición tratados de conformidad con el punto 4.4.2.1 se convertirán del árbol de salida al árbol de entrada del IHPC de tipo 1 de acuerdo con las ecuaciones siguientes. Cuando se realice la misma ronda de ensayo para varias marchas, la conversión se efectuará para cada una de ellas por separado.   donde:
|
b) | Los mapas de potencia eléctrica determinados para cada marcha hacia delante de conformidad con el punto 4.4.2.1 y convertidos en el árbol de entrada de conformidad con el punto 4.4.2.3, letra a), se utilizarán como base para los siguientes cálculos. Todos los valores de potencia eléctrica del inversor de estos mapas de potencia eléctrica se convertirán a los mapas respectivos del sistema de máquina eléctrica virtual mediante la deducción de las pérdidas de la parte de la caja de cambios con arreglo a la siguiente ecuación:  donde:
|
c) | Los valores del par de resistencia del sistema de máquina eléctrica virtual se especificarán en los mismos puntos de consigna de velocidad de giro, nEM,virt, con referencia al árbol de entrada del IHPC de tipo 1 utilizado para la definición de las curvas de par máximo y mínimo del sistema de máquina eléctrica virtual. Cada valor único del par de resistencia en Nm indicado en los diferentes puntos de consigna de velocidad de giro se fijará en cero. |
d) | La inercia giratoria del sistema de máquina eléctrica virtual se calculará convirtiendo los valores de inercia de las máquinas eléctricas reales, determinados de acuerdo con el punto 8 del apéndice 8 del presente anexo, al valor correspondiente de inercia giratoria referido al árbol de entrada del IHPC de tipo 1. |
4.4.3. Generación de los datos de entrada de la herramienta de simulación
Dado que los IHPC de tipo 1 se dividen virtualmente en dos componentes separados para la manipulación en la herramienta de simulación, se deberán determinar los datos de entrada de componente de forma separada para un sistema de máquina eléctrica y una transmisión. El número de certificación indicado en los datos de entrada será el mismo para ambos componentes, el sistema de máquina eléctrica y la transmisión.
4.4.3.1. Datos de entrada del sistema de máquina eléctrica virtual
Los datos de entrada para el sistema de máquina eléctrica virtual se generarán de conformidad con las definiciones para el sistema de máquina eléctrica que figuran en el apéndice 15 sobre la base de los datos finales resultantes de seguir las disposiciones del punto 4.4.2.3.
4.4.3.2. Datos de entrada de la transmisión virtual
Los datos de entrada para la transmisión virtual se generarán de conformidad con las definiciones para la transmisión virtual que figuran en el anexo VI, apéndice 12, cuadros 1 a 3, sobre la base de los datos finales resultantes de seguir las disposiciones del punto 4.4.2.2. El valor del parámetro “TransmissionType” del cuadro 1 se fijará en “IHPC Type 1”.
5. Ensayo de sistemas de baterías o subsistemas de baterías representativos
El dispositivo de acondicionamiento térmico de la UUT de batería y el correspondiente circuito de acondicionamiento térmico en el equipo del banco de ensayo deberán estar operativos para satisfacer las prestaciones de acondicionamiento térmico de dicha UUT de batería, de acuerdo con la aplicación del vehículo, y deberán permitir que el equipo del banco de ensayo lleve a cabo el procedimiento de ensayo solicitado dentro de los límites de funcionamiento de la UUT de batería.
5.1. Disposiciones generales
Los componentes de la UUT de batería pueden distribuirse en diferentes dispositivos dentro del vehículo.
La UUT de batería estará controlada por la UCB, y el equipo del banco de ensayo se ajustará a los límites de funcionamiento proporcionados por la UCB a través del sistema de comunicación por bus. El dispositivo de acondicionamiento térmico de la UUT de batería y el correspondiente circuito de acondicionamiento térmico en el equipo del banco de ensayo estarán operativos de acuerdo con los controles de la UCB, salvo que se especifique otra cosa en el procedimiento de ensayo concreto. La UCB deberá permitir que el equipo del banco de ensayo realice el procedimiento de ensayo solicitado dentro de los límites de funcionamiento de la UUT de batería. En caso necesario, el fabricante de componentes adaptará el programa de UCB para el procedimiento de ensayo solicitado, pero dentro de los límites de funcionamiento y seguridad de la UUT de batería.
5.1.1. Condiciones de equilibrio térmico
Se alcanza el equilibrio térmico si, durante un período de una hora, las desviaciones entre la temperatura del elemento especificada por el fabricante de componentes y la temperatura de todos los puntos de medición de la temperatura del elemento son inferiores a ± 7 K.
5.1.2. Convenciones sobre los signos
5.1.2.1. Corriente
Los valores de corriente medidos tendrán un signo positivo para la descarga y un signo negativo para la carga.
5.1.3. Lugar de referencia para la temperatura ambiente
La temperatura ambiente se medirá a una distancia de 1 m de la UUT de batería en un punto indicado por el fabricante de componentes.
5.1.4. Condiciones térmicas
La temperatura de ensayo de la batería, es decir, la temperatura de funcionamiento deseada de la UUT de batería, será la especificada por el fabricante de componentes. La temperatura de todos los puntos de medición de la temperatura del elemento se situará dentro de los límites especificados por el fabricante de componentes durante todas las rondas de ensayo realizadas.
En el caso de las UUT de batería con acondicionamiento líquido (es decir, calefacción o refrigeración), la temperatura del fluido de acondicionamiento se registrará en la entrada de la UUT de batería y deberá mantenerse a ± 2 K de un valor especificado por el fabricante de componentes.
En el caso de UUT de batería refrigeradas por aire, la temperatura de la UUT de batería en un punto indicado por el fabricante de componentes deberá mantenerse a + 0/– 20 K del valor máximo especificado por este.
En todas las rondas de ensayo realizadas, la potencia disponible de refrigeración o calefacción en el banco de ensayo se limitará a un valor declarado por el fabricante de componentes. Este valor se registrará junto con los datos del ensayo.
La potencia disponible de refrigeración o calefacción en el banco de ensayo se determinará con arreglo a los procedimientos siguientes y se registrará junto con los datos reales de ensayo de los componentes:
1) | Para el acondicionamiento líquido, a partir del flujo másico del fluido de acondicionamiento y la diferencia de temperatura con respecto al intercambiador de calor en el lado de la UUT de batería. |
2) | Para el acondicionamiento eléctrico, a partir de la tensión y la corriente. El fabricante de componentes podrá modificar la conexión eléctrica de esta unidad de acondicionamiento para la certificación de la UUT de batería a fin de permitir una medición de las características de dicha UUT de batería sin tener en cuenta la potencia eléctrica necesaria para el acondicionamiento (por ejemplo, si el acondicionamiento se implementa y conecta directamente dentro de la UUT de batería). A pesar de estas disposiciones, se registrará la potencia eléctrica de refrigeración o calefacción requerida suministrada externamente a la UUT de batería por una unidad de acondicionamiento. |
3) | Para otros tipos de acondicionamiento, sobre la base del buen juicio técnico y las discusiones con la autoridad de homologación de tipo. |
5.2. Ciclos de preparación
La UUT de batería se acondicionará realizando un máximo de cinco ciclos de descarga completa seguida de carga completa a fin de garantizar la estabilización del rendimiento del sistema antes de que comience el ensayo real.
Se realizarán ciclos consecutivos de descarga completa seguida de carga completa a la temperatura de funcionamiento definida por el fabricante de componentes hasta que se alcance el estado de “preacondicionamiento”. Para que una UUT de batería se considere “preacondicionada”, la capacidad de descarga durante dos descargas consecutivas no ha de variar más del 3 % de la capacidad asignada o se han de han de haber realizado las cinco repeticiones mencionadas.
La tensión de la UUT de batería no deberá caer por debajo de la tensión mínima recomendada por el fabricante de componentes al final de la descarga (la tensión mínima es la tensión más baja durante la descarga sin daños irreversibles a la UUT de batería). El fabricante de componentes definirá los criterios de terminación de los ciclos de descarga completa y de carga completa.
5.2.1. Niveles de corriente en los ciclos de preparación de los HPBS
La descarga se efectuará a una corriente de 2 C, la carga se efectuará de acuerdo con las recomendaciones del fabricante de componentes.
5.2.2. Niveles de corriente en los ciclos de preparación del preacondicionamiento de los HPBS
La descarga se efectuará a una corriente de 1/3 C, la carga se efectuará de acuerdo con las recomendaciones del fabricante de componentes.
5.3. Ciclo estándar
La finalidad de un ciclo estándar (CE) es garantizar las mismas condiciones iniciales para cada ensayo específico de una UUT de batería, así como para la energía cargada a efectos de conformidad de la producción con arreglo al apéndice 12. Se llevará a cabo a la temperatura de funcionamiento definida por el fabricante de componentes.
5.3.1. Ciclo estándar para HPBS
El CE de los HPBS consistirá en los siguientes acontecimientos en orden consecutivo: una descarga estándar, un período de descanso, una carga estándar y un segundo período de descanso.
La descarga estándar se efectuará con una corriente de 1 C hasta bajar a un estado de carga mínimo, de conformidad con las especificaciones del fabricante de componentes.
El período de descanso comenzará inmediatamente después del final de la descarga y durará treinta minutos.
El procedimiento de carga estándar se llevará a cabo de conformidad con las especificaciones del fabricante de componentes en relación con los criterios para el fin de la carga, así como con los plazos aplicables para el procedimiento de carga general.
El segundo período de descanso comenzará inmediatamente después del final de la carga y durará treinta minutos.
5.3.2. Ciclo estándar para HEBS
El CE de los HEBS consistirá en los siguientes acontecimientos en orden consecutivo: una descarga estándar, un período de descanso, una carga estándar y un segundo período de descanso.
La descarga estándar se efectuará con una corriente de 1/3 C hasta bajar a un estado de carga mínimo, de conformidad con las especificaciones del fabricante de componentes.
El período de descanso comenzará inmediatamente después del final de la descarga y durará treinta minutos.
El procedimiento de carga estándar se llevará a cabo de conformidad con las especificaciones del fabricante de componentes en relación con los criterios para el fin de la carga, así como con los plazos aplicables para el procedimiento de carga general.
El segundo período de descanso comenzará inmediatamente después del final de la carga y durará treinta minutos.
5.4. Rondas de ensayo que deben realizarse
Antes de realizar cualquier ensayo con arreglo al presente punto, la UUT de batería se someterá a las disposiciones del punto 5.2.
5.4.1. Procedimiento de ensayo de la capacidad asignada
Este ensayo mide la capacidad asignada de la UUT de batería en Ah a tasas de descarga de corriente constantes.
5.4.1.1. Señales que deben medirse
Se registrarán las siguientes señales durante el preacondicionamiento, los ciclos estándar realizados y la ronda de ensayo real:
— | Corriente de carga/descarga en los bornes de la UUT de batería |
— | Tensión a través de los bornes de la UUT de batería |
— | Temperaturas de todos los puntos de medición de la UUT de batería |
— | Temperatura ambiente en el banco de ensayo |
— | Potencia de calefacción o refrigeración para la UUT de batería |
5.4.1.2. Ronda de ensayo
Una vez que la UUT de batería se haya cargado completamente de conformidad con las especificaciones del fabricante de componentes y se alcance el equilibrio térmico de conformidad con el punto 5.1.1, se realizará un ciclo estándar de conformidad con el punto 5.3.
La ronda de ensayo real comenzará dentro de las tres horas siguientes al final del ciclo estándar; de lo contrario, se repetirá el ciclo estándar.
La ronda de ensayo real se realizará a temperatura ambiente y consistirá en una descarga de corriente constante con las siguientes tasas de descarga:
— | En el caso de los HPBS, a la capacidad asignada 1 C en Ah especificada por el fabricante de componentes |
— | En el caso de los HEBS, a la capacidad asignada 1/3 C en Ah especificada por el fabricante de componentes |
Todos los ensayos de descarga deberán terminar en las condiciones mínimas de conformidad con las especificaciones del fabricante de componentes.
5.4.1.3. Interpretación de los resultados
La capacidad en Ah obtenida de la corriente de la batería integrada a lo largo del tiempo durante la ronda de ensayo real de conformidad con el punto 5.4.1.2 se utilizará como valor de la capacidad asignada.
5.4.1.4. Datos que deben notificarse
Se notificarán los datos siguientes:
— | Capacidad asignada determinada de conformidad con el punto 5.4.1.3 |
— | Valores medios durante la ronda de ensayo real de todas las señales registradas de conformidad con el punto 5.4.1.1 |
A efectos de los ensayos de conformidad de la producción, también se calcularán los siguientes valores:
— | La energía total cargada, Echa, del 20 al 80 % del estado de carga durante el ciclo estándar realizado antes de la ronda de ensayo real. |
— | La energía total descargada, Edis, del 80 al 20 % del estado de carga durante la ronda de ensayo real. |
Todos los valores de estado de carga utilizados se calcularán sobre la base de la capacidad asignada real medida determinada de conformidad con el punto 5.4.1.3.
La eficiencia de ida y vuelta ηBAT se calculará dividiendo el total de la energía descargada, Edis, por el total de la energía cargada, Echa, y se notificará en la ficha de características de conformidad con el apéndice 5.
5.4.2. Procedimiento de ensayo de la tensión en circuito abierto, la resistencia interna y los límites de corriente
Este ensayo determina la resistencia óhmica de las condiciones de descarga y carga, así como la OCV de la UUT de batería sometida a ensayo en función del estado de carga. Además, se verificará la corriente máxima para la descarga y la carga declarada por el fabricante de componentes.
5.4.2.1. Disposiciones generales para el ensayo
Todos los valores de estado de carga utilizados se calcularán sobre la base de la capacidad asignada real medida determinada de conformidad con el punto 5.4.1.3.
Solo cuando la UUT de batería alcance el límite de tensión de descarga durante la descarga, la corriente se reducirá de manera que la tensión del borne de la UUT de batería se mantenga en el límite de tensión de descarga a lo largo de todo el impulso de descarga.
Solo cuando la UUT de batería alcance el límite de tensión de carga durante la carga, la corriente se reducirá de manera que la tensión del borne de la UUT de batería se mantenga en el límite de tensión de carga a lo largo de todo el impulso de carga regenerativa.
Si el equipo de ensayo no puede proporcionar el valor de la corriente con la exactitud solicitada de ± 1 % del valor deseado en los 100 ms siguientes a un cambio en el perfil de la corriente, se descartarán los datos registrados respectivos y no se calcularán los valores correspondientes a la tensión en circuito abierto ni a la resistencia interna a partir de estos datos.
Si los límites de funcionamiento facilitados por la UCB a través del sistema de comunicación por bus exigen que la corriente se reduzca para mantenerse dentro de los límites de funcionamiento de la UUT de batería, el equipo del banco de ensayo reducirá la corriente deseada respectiva de acuerdo con las exigencias de la UCB.
5.4.2.2. Señales que deben medirse
Se registrarán las siguientes señales durante el preacondicionamiento y la ronda de ensayo real:
— | Corriente de descarga en los bornes de la UUT de batería |
— | Tensión a través de los bornes de la UUT de batería |
— | Temperaturas de todos los puntos de medición de la UUT de batería |
— | Temperatura ambiente en el banco de ensayo |
— | Potencia de calefacción o refrigeración para la UUT de batería |
5.4.2.3. Ronda de ensayo
5.4.2.3.1. Preacondicionamiento
Una vez que la UUT de batería se haya cargado completamente de conformidad con las especificaciones del fabricante de componentes y se alcance el equilibrio térmico de conformidad con el punto 5.1.1, se realizará un ciclo estándar de conformidad con el punto 5.3.
En un período de 1 a 3 horas después del final del ciclo estándar, se iniciará la ronda de ensayo real. En caso contrario, se repetirá el procedimiento descrito en el punto anterior.
5.4.2.3.2. Procedimiento de ensayo
En el caso de los HPBS, el ensayo se realizará a cinco niveles de estado de descarga diferentes: 80, 65, 50, 35 y 20 %.
En el caso de los HEBS, el ensayo se realizará a cinco niveles de estado de descarga diferentes: 90, 70, 50, 35 y 20 %.
En la última fase, con un estado de descarga del 20 %, el fabricante de componentes podrá reducir la corriente máxima de descarga de la UUT de batería a fin de que el estado de descarga se mantenga por encima del mínimo, de conformidad con las especificaciones del fabricante de componentes, y se evite una descarga profunda.
Antes del inicio de las rondas de ensayo reales a cada nivel de estado de descarga, la UUT de batería se preacondicionará de conformidad con el punto 5.4.2.3.1.
A fin de alcanzar los niveles de estado de descarga necesarios para los ensayos desde la situación inicial de la UUT de batería, esta se descargará a una corriente nominal constante de 1 C para los HPBS y de 1/3 C para los HEBS, seguida de un período de descanso de treinta minutos antes de que comience la siguiente medición.
Antes del ensayo, el fabricante de componentes declarará la corriente máxima de carga y de descarga para cada nivel de estado de carga diferente que pueda aplicarse a lo largo de la duración del respectivo incremento de tiempo del impulso de corriente definido de acuerdo con el cuadro 3 para los HPBS y el cuadro 4 para los HEBS.
La ronda de ensayo real se realizará a temperatura ambiente y consistirá en el perfil de corriente de acuerdo con el cuadro 3 para el HPBS y con el cuadro 4 para el HEBS.
Cuadro 3
Perfil de corriente para HPBS
Incremento de tiempo [s] | Tiempo acumulado [s] | Corriente deseada |
0 | 0 | 0 |
20 | 20 | Idischg_max/33 |
40 | 60 | 0 |
20 | 80 | Ichg_max/33 |
40 | 120 | 0 |
20 | 140 | Idischg_max/32 |
40 | 180 | 0 |
20 | 200 | Ichg_max/32 |
40 | 240 | 0 |
20 | 260 | Idischg_max/3 |
40 | 300 | 0 |
20 | 320 | Ichg_max/3 |
40 | 360 | 0 |
20 | 380 | Idischg_max |
40 | 420 | 0 |
20 | 440 | Ichg_max |
40 | 480 | 0 |
Cuadro 4
Perfil de corriente para HEBS
Incremento de tiempo [s] | Tiempo acumulado [s] | Corriente deseada |
0 | 0 | 0 |
120 | 120 | Idischg_max/33 |
40 | 160 | 0 |
120 | 280 | Ichg_max/33 |
40 | 320 | 0 |
120 | 440 | Idischg_max/32 |
40 | 480 | 0 |
120 | 600 | Ichg_max/32 |
40 | 640 | 0 |
120 | 760 | Idischg_max/3 |
40 | 800 | 0 |
120 | 920 | Ichg_max/3 |
40 | 960 | 0 |
120 | 1080 | Idischg_max |
40 | 1120 | 0 |
120 | 1240 | Ichg_max |
40 | 1280 | 0 |
Donde
Idischg_max | es el valor absoluto de la corriente de descarga máxima especificada por el fabricante de componentes al nivel de estado de descarga específico que puede aplicarse a lo largo de todo el incremento de tiempo respectivo del impulso de corriente |
Ichg_max | es el valor absoluto de la corriente de carga máxima especificada por el fabricante de componentes al nivel de estado de descarga específico que puede aplicarse a lo largo de todo el incremento de tiempo respectivo del impulso de corriente |
La tensión en el tiempo cero de la ronda de ensayo antes de que se produzca el primer cambio en la corriente deseada, es decir, V0, se medirá como valor medio a lo largo de 100 ms.
En el caso de los HPBS, se medirán las tensiones y las corrientes siguientes:
1) | Para cada nivel de impulso de la corriente de descarga y carga especificado en el cuadro 3, se deberá medir la tensión con corriente cero como valor medio durante el último segundo antes de que ocurra el cambio en la corriente deseada, es decir Vdstart para la descarga y Vcstart para la carga. |
2) | Para cada nivel de impulso de la corriente de descarga especificado en el cuadro 3, la tensión a 2, 10 y 20 segundos después de que se produzca el cambio en la corriente deseada (Vd2, Vd10, Vd20) y la corriente correspondiente (Id2, Id10, y Id20) se medirán como un valor medio durante 100 ms. |
3) | Para cada nivel de impulso de la corriente de carga especificado en el cuadro 3, la tensión a 2, 10 y 20 segundos después de que se produzca el cambio en la corriente deseada (Vc2, Vc10, Vc20) y la corriente correspondiente (Ic2, Ic10, y Ic20) se medirán como un valor medio durante 100 ms. |
El cuadro 5 ofrece un resumen de los valores de tensión y corriente que deben medirse a lo largo del tiempo después de que se produzca el cambio en la corriente deseada en el caso de los HPBS.
Cuadro 5
Puntos de medición de la tensión para cada nivel diferente de un impulso de corriente (descarga y carga) en el caso de los HPBS
Tiempo después de producirse el cambio en la corriente deseada [s] | Descarga (D) o carga (C) | Tensión | Corriente |
2 | D | Vd2 | Id2 |
10 | D | Vd10 | Id10 |
20 | D | Vd20 | Id20 |
2 | C | Vc2 | Ic2 |
10 | C | Vc10 | Ic10 |
20 | C | Vc20 | Ic20 |
En el caso de los HEBS, se medirán las tensiones y corrientes siguientes:
1) | Para cada nivel de impulso de la corriente de descarga y carga especificado en el cuadro 4, se deberá medir la tensión con corriente cero como valor medio durante el último segundo antes de que se produzca el cambio en la corriente deseada, es decir Vdstart para la descarga y Vcstart para la carga. |
2) | Para cada nivel de impulso de la corriente de descarga especificado en el cuadro 4, la tensión a 2, 10, 20 y 120 segundos después de que se produzca el cambio en la corriente deseada (Vd2, Vd10, Vd20 y Vd120) y la corriente correspondiente (Id2, Id10, Id20 e Id120) se medirán como valor medio durante 100 ms. |
3) | Para cada nivel de impulso de la corriente de carga especificado en el cuadro 4, la tensión a 2, 10, 20 y 120 segundos después de que se produzca el cambio en la corriente deseada (Vc2, Vc10, Vc20 y Vc120) y la corriente correspondiente (Ic2, Ic10, Ic20 e Ic120) se medirán como valor medio durante 100 ms. |
El cuadro 6 ofrece un resumen de los valores de tensión y corriente que deben medirse a lo largo del tiempo después de que se produzca el cambio en la corriente deseada para en el caso de los HEBS.
Cuadro 6
Puntos de medición de la tensión para cada nivel diferente de un impulso de corriente (descarga y carga) en el caso de los HEBS
Tiempo después de producirse el cambio en la corriente deseada [s] | Descarga (D) o carga (C) | Tensión | Corriente |
2 | D | Vd2 | Id2 |
10 | D | Vd10 | Id10 |
20 | D | Vd20 | Id20 |
120 | D | Vd120 | Id120 |
2 | C | Vc2 | Ic2 |
10 | C | Vc10 | Ic10 |
20 | C | Vc20 | Ic20 |
120 | C | Vc120 | Ic120 |
5.4.2.4 Interpretación de los resultados
Los siguientes cálculos se realizarán por separado para cada nivel de estado de carga medido de conformidad con el punto 5.4.2.3.
5.4.2.4.1. Cálculos para los HPBS
1) | Para cada nivel de impulso de corriente de descarga especificado en el cuadro 3, los valores de resistencia interna se calcularán a partir de los valores de tensión y corriente medidos de conformidad con el punto 5.4.2.3, con arreglo a las ecuaciones siguientes:
|
2) | Las resistencias internas para la descarga RId2_avg, RId10_avg, RId20_avg se calcularán como media de todos los niveles de impulsos de corriente especificados en el cuadro 3 a partir de los valores individuales calculados con arreglo al subpunto 1. |
3) | Para cada nivel de impulso de corriente de carga especificado en el cuadro 3, los valores de resistencia interna se calcularán a partir de los valores de tensión y corriente medidos de conformidad con el punto 5.4.2.3, con arreglo a las ecuaciones siguientes:
|
4) | Las resistencias internas para la carga RIc2_avg, RIc10_avg, RIc20_avg se calcularán como la media de todos los diferentes niveles de impulsos de corriente especificados en el cuadro 3 a partir de los valores individuales calculados con arreglo al subpunto 3. |
5) | Las resistencias internas totales RI2, RI10 y RI20 se calcularán como la media de los respectivos valores de las descargas y las cargas calculadas conforme a lo dispuesto en los subpuntos 2 y 4. |
6) | La tensión en circuito abierto será el valor de V0 medido de conformidad con el punto 5.4.2.3 para el nivel de estado de carga respectivo. |
7) | Los límites de la corriente máxima de descarga se calcularán como el valor medio a lo largo de 20 segundos a la corriente deseada Idischg_max para cada nivel de estado de carga medido de conformidad con el punto 5.4.2.3. |
(8) | Los límites de la corriente máxima de carga se calcularán como el valor medio a lo largo de 20 segundos a la corriente deseada Ichg_max para cada nivel de estado de carga medido de conformidad con el punto 5.4.2.3. Los valores absolutos de los resultados se comunicarán como valores finales. |
5.4.2.4.2. Cálculos para los HEBS
1) | Para cada nivel de impulso de la corriente de descarga especificado en el cuadro 4, los valores de la resistencia interna se calcularán a partir de los valores de tensión y corriente medidos de conformidad con el punto 5.4.2.3, con arreglo a las siguientes ecuaciones:
|
2) | Las resistencias internas para la descarga RId2_avg, RId10_avg, RId20_avg y RId120_avg se calcularán como la media de todos los diferentes niveles de impulso de corriente especificados en el cuadro 4 a partir de los valores individuales calculados con arreglo al subpunto 1. |
3) | Para cada nivel de impulso de la corriente de carga especificado en el cuadro 4, los valores de la resistencia interna se calcularán a partir de los valores de tensión y corriente medidos de conformidad con el punto 5.4.2.3, con arreglo a las siguientes ecuaciones:
|
4) | Las resistencias internas para la carga RIc2_avg, RIc10_avg, RIc20_avg y RIc120_avg se calcularán como la media de todos los diferentes niveles de impulso de corriente especificados en el cuadro 4 a partir de los valores individuales calculados con arreglo al subpunto 3. |
5) | Las resistencias internas totales RI2, RI10, RI20 y RI120 se calcularán como la media de los respectivos valores de las descargas y las cargas calculadas conforme a lo dispuesto en los subpuntos 2 y 4. |
6) | La tensión en circuito abierto será el valor de V0 medido de conformidad con el punto 5.4.2.3 para el nivel de estado de carga respectivo. |
7) | Los límites de la corriente máxima de descarga se calcularán como el valor medio a lo largo de 120 segundos a la corriente deseada Idischg_max para cada nivel de estado de carga medido de conformidad con el punto 5.4.2.3. |
8) | Los límites de la corriente máxima de carga se calcularán como el valor medio a lo largo de 120 segundos a la corriente deseada Ichg_max para cada nivel de estado de carga medido de conformidad con el punto 5.4.2.3. Los valores absolutos de los resultados se comunicarán como valores finales. |
5.5. Postratamiento de los datos de medición de la UUT de batería
Los valores de OCV que dependen del estado de carga se definirán sobre la base de los valores determinados para los diferentes niveles de estado de carga de conformidad con el punto 5.4.2.4.1, subpunto 6, para los HPBS, y el punto 5.4.2.4.2, subpunto 6, para los HEBS.
Los distintos valores de las resistencias internas que dependen del estado de carga se definirán sobre la base de los valores determinados para los diferentes niveles de estado de carga de conformidad con el punto 5.4.2.4.1, subpunto 5, para los HPBS, y el punto 5.4.2.4.2, subpunto 5, para los HEBS.
Los límites de la corriente máxima de descarga y de la corriente máxima de carga se definirán sobre la base de los valores declarados por el fabricante de componentes antes del ensayo. Si un valor específico para la corriente máxima de descarga o para la corriente máxima de carga determinado de conformidad con el punto 5.4.2.4.1, subpuntos 7 y 8, para los HPBS, y con el punto 5.4.2.4.2, subpuntos 7 y 8, para los HEBS, se desvía en más de un ± 2 % del valor declarado por el fabricante de componentes antes del ensayo, se comunicará el valor respectivo determinado de acuerdo con los puntos 5.4.2.4.1, subpuntos 7 y 8, para los HPBS, y con el punto 5.4.2.4.2, subpuntos 7 y 8, para los HEBS.
6. Ensayo de sistemas de condensadores o subsistemas de condensadores representativos
6.1. Disposiciones generales
Los componentes de un sistema de condensadores de la UUT de condensador también pueden distribuirse en diferentes dispositivos dentro del vehículo.
Las características de un condensador apenas dependen de su estado de carga o de corriente, respectivamente. Por lo tanto, solo se prescribe una única ronda de ensayo para el cálculo de los parámetros de entrada del modelo.
6.1.1. Convención de signos para la corriente
Los valores de corriente medidos tendrán un signo positivo para la descarga y un signo negativo para la carga.
6.1.2. Lugar de referencia para la temperatura ambiente
La temperatura ambiente se medirá a una distancia de 1 m de la UUT de condensador en un punto de dicha UUT de condensador indicado por el fabricante de componentes.
6.1.3. Condiciones térmicas
La temperatura de ensayo del condensador, es decir, la temperatura de funcionamiento deseada de la UUT de condensador, será la especificada por el fabricante de componentes. La temperatura de todos los puntos de medición de la temperatura del elemento del condensador se situará dentro de los límites especificados por el fabricante de componentes durante todas las rondas de ensayo realizadas.
En el caso de las UUT de condensador con acondicionamiento líquido (es decir, calefacción o refrigeración), la temperatura del fluido de acondicionamiento se registrará en la entrada de la UUT de condensador y deberá mantenerse a ± 2 K de un valor especificado por el fabricante de componentes.
En el caso de las UUT de condensador refrigeradas por aire, la temperatura en un punto indicado por el fabricante de componentes deberá mantenerse a + 0/-20 K del valor máximo especificado por el fabricante de componentes.
En todas las rondas de ensayo realizadas, la potencia disponible de refrigeración o calefacción en el banco de ensayo se limitará a un valor declarado por el fabricante de componentes. Este valor se registrará junto con los datos del ensayo.
La potencia disponible de refrigeración o calefacción en el banco de ensayo se determinará con arreglo a los procedimientos siguientes y se registrará junto con los datos reales de ensayo de los componentes:
1) | Para el acondicionamiento líquido, a partir del flujo másico del fluido de acondicionamiento y la diferencia de temperatura con respecto al intercambiador de calor en el lado de la UUT de condensador. |
2) | Para el acondicionamiento eléctrico, a partir de la tensión y la corriente. El fabricante de componentes podrá modificar la conexión eléctrica de esta unidad de acondicionamiento para la certificación de la UUT de condensador a fin de permitir una medición de las características de dicha UUT de condensador sin tener en cuenta la potencia eléctrica necesaria para el acondicionamiento (por ejemplo, si el acondicionamiento se implementa y conecta directamente dentro de la UUT de condensador). A pesar de estas disposiciones, se registrará la potencia eléctrica de refrigeración o calefacción requerida suministrada externamente a la UUT de condensador por una unidad de acondicionamiento. |
3) | Para otros tipos de acondicionamiento, sobre la base del buen juicio técnico y las discusiones con la autoridad de homologación de tipo. |
6.2. Condiciones de ensayo
a) | La UUT de condensador se colocará en una celda de ensayo con la temperatura controlada. La temperatura ambiente se acondicionará a 25 ± 10 °C. |
b) | La tensión se medirá en los bornes de la UUT de condensador. |
c) | El sistema de acondicionamiento térmico de la UUT de condensador y el correspondiente circuito de acondicionamiento térmico en el equipo del banco de ensayo deberán estar plenamente operativos de conformidad con los controles respectivos. |
d) | La unidad de control deberá permitir que el equipo del banco de ensayo realice el procedimiento de ensayo solicitado dentro de los límites de funcionamiento de la UUT de condensador. En caso necesario, el fabricante de componentes de la UUT de condensador adaptará el programa de la unidad de control para el procedimiento de ensayo solicitado. |
6.3. Ensayo de las características de la UUT de condensador
a) | Después de la carga completa y de la descarga completa de la UUT de condensador hasta su tensión de funcionamiento más baja de acuerdo con el método de carga especificado por el fabricante de componentes, se estabilizará durante al menos 2 horas, pero no más de 6 horas. |
b) | La temperatura de la UUT de condensador al comienzo del ensayo deberá ser de 25 °C ± 2 °C. No obstante, podrá optarse por 45 ± 2 °C informando a la autoridad de homologación de tipo o de certificación de que este nivel de temperatura es más representativo de las condiciones de la aplicación típica. |
c) | Después del tiempo de estabilización, se realizará un ciclo completo de carga y descarga de acuerdo con la figura 2 con una corriente constante de Itest. Itest será la corriente continua máxima permitida para la UUT de condensador especificada por el fabricante de componentes. |
d) | Tras un período de espera de al menos 30 segundos (de t0 a t1), la UUT de condensador se cargará con una corriente constante Itest hasta que se alcance la tensión de funcionamiento máxima Vmax. Luego se detendrá la carga y la UUT de condensador se estabilizará durante 30 segundos (de t2 a t3) de forma que la tensión pueda situarse en su valor final Vb antes de que empiece la descarga. Después de esto, la UUT de condensador se descargará con una corriente constante Itest hasta que se alcance la tensión de funcionamiento más baja Vmin. A continuación (desde el momento t4 en adelante), habrá otro período de espera de al menos 30 segundos para que la tensión se sitúe en su valor final Vc. |
e) | La corriente y la tensión a lo largo del tiempo, respectivamente Imeas y Vmeas, se registrarán con una frecuencia de muestreo de al menos 10 Hz. |
f) | A partir de la medición se determinarán los siguientes valores característicos (ilustrados en la figura 2):
|
Figura 2
Ejemplo de curva de tensión para la medición de una UUT de condensador

ΔV(t1) es la diferencia absoluta de tensión entre Va y el valor de la ordenada en el origen de la aproximación a la recta en el momento t1. |
ΔV(t3) es la diferencia absoluta de tensión entre Vb y el valor de la ordenada en el origen de la aproximación a la recta en el momento t3. |
ΔV(t2) es la diferencia absoluta de tensión entre Vmax y Vb. |
ΔV(t4) es la diferencia absoluta de tensión entre Vmin y Vc. |
6.4. Postratamiento de los datos de medición de la UUT de condensador
6.4.1. Cálculo de la resistencia interna y de la capacidad
Los datos de medición obtenidos de conformidad con el punto 6.3 se utilizarán para calcular los valores de resistencia interna (R) y capacidad (C) con arreglo a las ecuaciones siguientes:
a) | La capacidad de carga y descarga se calculará como sigue:
|
b) | La corriente máxima de la carga y la descarga se calculará como sigue:
|
c) | La resistencia interna de la carga y la descarga se calculará como sigue:
|
d) | En el caso del modelo, se necesitan una sola capacidad y una sola resistencia, que se calcularán como sigue:
|
e) | La tensión máxima se definirá como el valor registrado de Vb y la tensión mínima se definirá como el valor registrado de Vc definido de conformidad con el punto 6.3, letra f). |
«Apéndice 1
MODELO DE CERTIFICADO DE COMPONENTE, UNIDAD TÉCNICA INDEPENDIENTE O SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO DE LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE UN SISTEMA DE MÁQUINA ELÉCTRICA / UN IEPC / UN IHPC DE TIPO 1 / UN SISTEMA DE BATERÍAS / UN SISTEMA DE CONDENSADORES
Sello de la Administración
Comunicación relativa a:
— | la concesión (1) |
— | la extensión (1) |
— | la denegación (1) |
— | la retirada (1) |
de un certificado de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de un sistema de máquina eléctrica / un IEPC / un IHPC de tipo 1 / un sistema de baterías / un sistema de condensadores, de conformidad con el Reglamento (UE) 2017/2400 de la Comisión.
Reglamento (UE) 2017/2400 de la Comisión, modificado en último lugar por ……………..
Número de certificación:
Hash:
Motivos de la extensión:
0.1. | Marca (nombre comercial del fabricante): |
0.2. | Tipo: |
0.3. | Medio de identificación del tipo |
0.3.1. | Ubicación del marcado de certificación: |
0.3.2. | Método de fijación del marcado de certificación: |
0.5. | Nombre y dirección del fabricante: |
0.6. | Nombre y dirección de las plantas de montaje: |
0.7. | Nombre y dirección del representante del fabricante (en su caso): |
1. | Información adicional (cuando proceda): véase la adenda |
2. | Autoridad de homologación encargada de realizar los ensayos: |
3. | Fecha del acta de ensayo: |
4. | Número del acta de ensayo: |
5. | Observaciones (en su caso): véase la adenda |
6. | Lugar: |
7. | Fecha: |
8. | Firma: |
Documentos adjuntos:
Expediente de homologación. Acta de ensayo.
«Apéndice 2
Ficha de características de un sistema de máquina eléctrica
Ficha de características n.o: | Expedición: Fecha de expedición: Fecha de modificación: |
en virtud de …
Tipo/familia de sistemas de máquina eléctrica (si procede):
…
0. | DATOS GENERALES |
0.1. | Nombre y dirección del fabricante: |
0.2. | Marca (nombre comercial del fabricante): |
0.3. | Tipo de sistema de máquina eléctrica: |
0.4. | Familia de sistemas de máquina eléctrica: |
0.5. | Tipo de sistema de máquina eléctrica como unidad técnica independiente / Familia de sistemas de máquina eléctrica como unidad técnica independiente |
0.6. | Denominaciones comerciales (si están disponibles): |
0.7. | Medio de identificación del modelo, si está marcado en el sistema de máquina eléctrica: |
0.8. | En el caso de componentes y unidades técnicas independientes, localización y método de fijación de la marca de homologación CE: |
0.9. | Nombre y dirección de las plantas de montaje: |
0.10. | Nombre y dirección del representante del fabricante: |
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL SISTEMA DE MÁQUINA ELÉCTRICA (DE ORIGEN) Y DE LOS TIPOS DE SISTEMA DE MÁQUINA ELÉCTRICA DENTRO DE UNA FAMILIA DE SISTEMAS DE MÁQUINA ELÉCTRICA
| |SME de origen | |Miembros de la familia | |||
| |o tipo de SME | | | |||
| | | | n.o 1 | | n.o 2 | | n.o 3 | | |
1. | Generalidades |
1.1. | Tensión de ensayo: V |
1.2. | Velocidad básica de giro del motor: 1/min |
1.3. | Velocidad máxima del árbol de salida del motor: 1/min |
1.4. | (o en su defecto) velocidad del árbol de salida del reductor / la caja de cambios: 1/min |
1.5. | Velocidad de potencia máxima: 1/min |
1.6. | Potencia máxima: kW |
1.7. | Velocidad de par máxima: 1/min |
1.8. | Par máximo: Nm |
1.9. | Potencia máxima durante treinta minutos: kW |
2. | Máquina eléctrica |
2.1. | Principio de funcionamiento |
2.1.1. | Corriente continua (CC) / corriente alterna (CA): |
2.1.2. | Número de fases: |
2.1.3. | De excitación / separada / en serie / compuesta: |
2.1.4. | Síncrona / asíncrona: |
2.1.5. | Rotor bobinado / con imanes permanentes / con caja: |
2.1.6. | Número de polos del motor: |
2.2. | Inercia giratoria: kgm2 |
3. | Controlador de potencia |
3.1. | Marca: |
3.2. | Tipo: |
3.3. | Principio de funcionamiento: |
3.4. | Principio de control: vectorial / de circuito abierto / cerrado / otro (especifíquese): |
3.5. | Corriente efectiva máxima que se suministra al motor: A |
3.6. | Para una duración máxima de: s |
3.7. | Intervalo de tensión de corriente continua utilizada (desde/hasta): V |
3.8. | El convertidor CC/CC forma parte del sistema de máquina eléctrica conforme al punto 4.1 del presente anexo (sí/no): |
4. | Sistema de refrigeración |
4.1. | Motor [líquido/aire/otros (especifíquense)]: |
4.2. | Controlador [líquido/aire/otros (especifíquense)]: |
4.3. | Descripción del sistema: |
4.4. | Principales dibujos: |
4.5. | Límites de temperatura (mín./máx.): K |
4.6. | En la posición de referencia: |
4.7. | Caudales (mín./máx.): L/min |
5. | Valores documentados de los ensayos de componentes |
5.1. | Cifras de eficiencia para la conformidad de la producción (3): |
5.2. | Sistema de refrigeración (declaración para cada circuito de refrigeración): |
5.2.1. | Flujo másico o volumétrico máximo de refrigerante o presión máxima de entrada: |
5.2.2. | Temperaturas máximas del refrigerante: |
5.2.3. | Potencia de refrigeración máxima disponible: |
5.2.4. | Valores medios registrados para cada ronda de ensayo |
5.2.4.1. | Flujo volumétrico o másico de refrigerante: |
5.2.4.2. | Temperatura del refrigerante en la entrada del circuito de refrigeración: |
5.2.4.3. | Temperatura del refrigerante en la entrada y la salida del intercambiador de calor del banco de ensayo en el lado del SME: |
LISTA DE DOCUMENTOS ADJUNTOS
N.o: | Descripción: | Fecha de expedición: |
1 | Información sobre las condiciones de ensayo del SME … |
|
2 | … |
|
Documento adjunto 1 a la ficha de características del sistema de máquina eléctrica
| Información sobre las condiciones de ensayo (si procede) |
1.1 | … |
«Apéndice 3
Ficha de características de un IEPC
Ficha de características n.o: | Expedición: Fecha de expedición: Fecha de modificación: |
en virtud de …
Tipo/familia de IEPC (en su caso):
…
0. | DATOS GENERALES |
0.1. | Nombre y dirección del fabricante: |
0.2. | Marca (nombre comercial del fabricante): |
0.3. | Tipo de IEPC: |
0.4. | Familia de IEPC: |
0.5. | Tipo de IEPC como unidad técnica independiente / Familia de IEPC como unidad técnica independiente: |
0.6. | Denominaciones comerciales (si están disponibles): |
0.7. | Medio de identificación del modelo, si está marcado en el IEPC: |
0.8. | En el caso de componentes y unidades técnicas independientes, localización y método de fijación de la marca de homologación CE: |
0.9. | Nombre y dirección de las plantas de montaje: |
0.10. | Nombre y dirección del representante del fabricante: |
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL IEPC (DE ORIGEN) Y DE LOS TIPOS DE IEPC DENTRO DE UNA FAMILIA DE IEPC
| |IEPC de origen | |Miembros de la familia | |||
| |o tipo de IEPC | | | |||
| | | | n.o 1 | | n.o 2 | | n.o 3 | | |
1. | Generalidades |
1.1. | Tensión de ensayo: V |
1.2. | Velocidad básica de giro del motor: 1/min |
1.3. | Velocidad máxima del árbol de salida del motor: 1/min |
1.4. | (o en su defecto) velocidad del árbol de salida del reductor / la caja de cambios: 1/min |
1.5. | Velocidad de potencia máxima: 1/min |
1.6. | Potencia máxima: kW |
1.7. | Velocidad de par máxima: 1/min |
1.8. | Par máximo: Nm |
1.9. | Potencia máxima durante treinta minutos: kW |
1.10. | Número de máquinas eléctricas: |
2. | Máquina eléctrica (para cada máquina eléctrica): |
2.1. | Identificador de la máquina eléctrica: |
2.2. | Principio de funcionamiento |
2.2.1. | Corriente continua (CC) / corriente alterna (CA): |
2.2.2. | Número de fases: |
2.2.3. | De excitación / separada / en serie / compuesta: |
2.2.4. | Síncrona / asíncrona: |
2.2.5. | Rotor bobinado / con imanes permanentes / con caja: |
2.2.6. | Número de polos del motor: |
2.3. | Inercia giratoria: kgm2 |
3. | Controlador de potencia (para cada controlador de potencia): |
3.1. | Identificador de la máquina eléctrica correspondiente: |
3.2. | Marca: |
3.3. | Tipo: |
3.4. | Principio de funcionamiento: |
3.5. | Principio de control: vectorial / de circuito abierto / cerrado / otro (especifíquese): |
3.6. | Corriente efectiva máxima que se suministra al motor: A |
3.7. | Para una duración máxima de: s |
3.8. | Intervalo de tensión de corriente continua utilizada (desde/hasta): V |
3.9. | El convertidor CC/CC forma parte del sistema de máquina eléctrica conforme al punto 4.1 del presente anexo (sí/no): |
4. | Sistema de refrigeración |
4.1. | Motor [líquido/aire/otros (especifíquense)]: |
4.2. | Controlador [líquido/aire/otros (especifíquense)]: |
4.3. | Descripción del sistema: |
4.4. | Principales dibujos: |
4.5. | Límites de temperatura (mín./máx.): K |
4.6. | En la posición de referencia: |
4.7. | Caudales (mín./máx.): g/min o L/min |
5. | Caja de cambios |
5.1. | Relación de transmisión, esquema de cambios y flujo de potencia: |
5.2. | Distancia entre centros, en el caso de transmisiones de árboles secundarios: |
5.3. | Tipo de cojinetes en las posiciones correspondientes (si están instalados): |
5.4. | Tipo de elementos de cambio de marchas (embragues de dientes, incluidos sincronizadores, o embragues de fricción) en las posiciones correspondientes (si están instalados): |
5.5. | Número total de marchas hacia delante: |
5.6. | Número de embragues de dientes para el cambio de marchas: |
5.7. | Número de sincronizadores: |
5.8. | Número de discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos): |
5.9. | Diámetro exterior de los discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos): |
5.10. | Rugosidad superficial de los dientes (incl. dibujos): |
5.11. | Número de obturadores de árbol dinámicos: |
5.12. | Flujo de aceite de lubricación y refrigeración por revolución del árbol de entrada de la transmisión |
5.13. | Viscosidad del aceite a 100 °C (± 10 %): |
5.14. | Presión del sistema en cajas de cambios de control hidráulico: |
5.15. | Nivel de aceite específico en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha. El nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado: |
5.16. | Nivel de aceite especificado (± 1 mm): |
5.17. | Relaciones de transmisión [-] y par de entrada máximo [Nm], potencia de entrada máxima (kW) y velocidad de entrada máxima [rpm] (para cada marcha hacia delante): |
6. | Diferencial |
6.1. | Relación de transmisión: |
6.2. | Principales especificaciones técnicas: |
6.3. | Principales dibujos: |
6.4. | Volumen de aceite: |
6.5. | Nivel de aceite: |
6.6. | Especificaciones del aceite: |
6.7. | Tipo de cojinetes (tipo, cantidad, diámetro interior, diámetro exterior, anchura y dibujo): |
6.8. | Tipo de junta (diámetro principal, número de labios): |
6.9. | Extremos de las ruedas (dibujo): |
6.9.1. | Tipo de cojinetes (tipo, cantidad, diámetro interior, diámetro exterior, anchura y dibujo): |
6.9.2. | Tipo de junta (diámetro principal, número de labios): |
6.9.3. | Tipo de grasa: |
6.10. | Número de satélites / engranajes rectos para el diferencial: |
6.11. | Anchura menor de los satélites / engranajes rectos para el diferencial: |
7. | Valores documentados de los ensayos de componentes |
7.1. | Cifras de eficiencia para la conformidad de la producción (*): |
7.2. | Sistema de refrigeración (declaración para cada circuito de refrigeración): |
7.2.1. | Flujo másico o volumétrico máximo de refrigerante o presión máxima de entrada: |
7.2.2. | Temperaturas máximas del refrigerante: |
7.2.3. | Potencia de refrigeración máxima disponible: |
7.2.4. | Valores medios registrados para cada ronda de ensayo |
7.2.4.1. | Flujo volumétrico o másico de refrigerante: |
7.2.4.2. | Temperatura del refrigerante en la entrada del circuito de refrigeración: |
7.2.4.3. | Temperatura del refrigerante en la entrada y la salida del intercambiador de calor del banco de ensayo en el lado del IEPC: |
LISTA DE DOCUMENTOS ADJUNTOS
N.o: | Descripción: | Fecha de expedición: |
1 | Información sobre las condiciones de ensayo del IEPC … |
|
2 | … |
|
Documento adjunto 1 de la ficha de características del IEPC
8. | Información sobre las condiciones de ensayo (si procede) |
8.1. | Velocidad de entrada máxima ensayada [rpm] |
8.2. | Par de entrada máximo ensayado [Nm] |
«Apéndice 4
Ficha de características de un IHPC de tipo 1
En el caso de los IHPC de tipo 1, la ficha de características constará de las partes aplicables de la ficha de características de los sistemas de máquina eléctrica de conformidad con el apéndice 2 del presente anexo y de la ficha de características de las transmisiones de conformidad con el apéndice 2 del anexo VI.
«Apéndice 5
Ficha de características de un tipo de sistema de baterías o de un tipo de subsistema de baterías representativo
Ficha de características n.o: | Expedición: Fecha de expedición: Fecha de modificación: |
en virtud de …
Tipo de sistema de baterías o de subsistema de baterías representativo:
…
0. | DATOS GENERALES |
0.1. | Nombre y dirección del fabricante: |
0.2. | Marca (nombre comercial del fabricante): |
0.3. | Tipo de sistema de baterías: |
0.4. | - |
0.5. | Tipo de sistema de baterías como unidad técnica independiente |
0.6. | Denominaciones comerciales (si están disponibles): |
0.7. | Medio de identificación del modelo, si está marcado en el sistema de baterías: |
0.8. | En el caso de componentes y unidades técnicas independientes, localización y método de fijación de la marca de homologación CE: |
0.9. | Nombre y dirección de las plantas de montaje: |
0.10. | Nombre y dirección del representante del fabricante: |
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL TIPO DE SISTEMA DE BATERÍAS O DE SUBSISTEMA DE BATERÍAS REPRESENTATIVO
Tipo de (sub)sistema de baterías
1. | Generalidades |
1.1. | Sistema completo o subsistema representativo: |
1.2. | HPBS/HEBS: |
1.3. | Principales especificaciones técnicas: |
1.4. | Química de los elementos: |
1.5. | Número de elementos en serie: |
1.6. | Número de elementos en paralelo: |
1.7. | Caja de conexión representativa con fusibles e interruptores incluidos en el sistema sometido a ensayo (sí/no): |
1.8. | Conectores de serie representativos incluidos en el sistema sometido a ensayo (sí/no): |
2. | Sistema de acondicionamiento |
2.1. | Líquido / aire / otro (especifíquese): |
2.2. | Descripción del sistema: |
2.3. | Principales dibujos: |
2.4. | Límites de temperatura (mín./máx.): K |
2.5. | En la posición de referencia: |
2.6. | Caudales (mín./máx.): L/min |
3. | Valores documentados de los ensayos de componentes |
3.1. | Eficiencia de ida y vuelta para la conformidad de la producción (**): |
3.2. | Corriente máxima de descarga para la conformidad de la producción: |
3.3. | Corriente máxima de carga para la conformidad de la producción: |
3.4. | Temperatura de ensayo (temperatura de funcionamiento deseada declarada): |
3.5. | Sistema de acondicionamiento (indíquese para cada ronda de ensayo realizada) |
3.5.1. | Refrigeración o calefacción necesarias: |
3.5.2. | Potencia de refrigeración o calefacción máxima disponible: |
LISTA DE DOCUMENTOS ADJUNTOS
N.o: | Descripción: | Fecha de expedición: |
1 | Información sobre las condiciones de ensayo del sistema de baterías … |
|
2 | … |
|
Documento adjunto 1 a la ficha de características del sistema de baterías
| Información sobre las condiciones de ensayo (si procede) |
1.1 | … |
«Apéndice 6
Ficha de características de un tipo de sistema de condensadores o de un tipo de subsistema de condensadores representativo
Ficha de características n.o: | Expedición: Fecha de expedición: Fecha de modificación: |
en virtud de …
Tipo de sistema de condensadores o de subsistema de condensadores representativo:
…
0. | DATOS GENERALES |
0.1. | Nombre y dirección del fabricante: |
0.2. | Marca (nombre comercial del fabricante): |
0.3. | Tipo de sistema de condensadores: |
0.4. | Familia de sistemas de condensadores: |
0.5. | Tipo de sistema de condensadores como unidad técnica independiente / Familia de sistemas de condensadores como unidad técnica independiente |
0.6. | Denominaciones comerciales (si están disponibles): |
0.7. | Medio de identificación del modelo, si está marcado en el sistema de condensadores: |
0.8. | En el caso de componentes y unidades técnicas independientes, localización y método de fijación de la marca de homologación CE: |
0.9. | Nombre y dirección de las plantas de montaje: |
0.10. | Nombre y dirección del representante del fabricante: |
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL TIPO DE SISTEMA DE CONDENSADORES O DE SUBSISTEMA DE CONDENSADORES REPRESENTATIVO
Tipo de (sub)sistema de condensadores
1. | Generalidades |
1.1. | Sistema completo o subsistema representativo: |
1.2. | Principales especificaciones técnicas: |
1.3. | Tecnología de elementos y especificaciones: |
1.4. | Número de elementos en serie: |
1.5. | Número de elementos en paralelo: |
1.6. | Caja de conexión representativa con fusibles e interruptores incluidos en el sistema sometido a ensayo (sí/no): |
1.7. | Conectores de serie representativos incluidos en el sistema sometido a ensayo (sí/no): |
2. | Sistema de acondicionamiento |
2.1. | Líquido / aire / otro (especifíquese): |
2.2. | Descripción del sistema: |
2.3. | Principales dibujos: |
2.4. | Límites de temperatura (mín./máx.): K |
2.5. | En la posición de referencia: |
2.6. | Caudales (mín./máx.): L/min |
3. | Valores documentados de los ensayos de componentes |
3.1. | Temperatura de ensayo (temperatura de funcionamiento deseada declarada): |
3.2. | Sistema de acondicionamiento (indíquese para cada ronda de ensayo realizada) |
3.2.1. | Refrigeración o calefacción necesarias: |
3.2.2. | Potencia de refrigeración o calefacción máxima disponible: |
LISTA DE DOCUMENTOS ADJUNTOS
N.o: | Descripción: | Fecha de expedición: |
1 | Información sobre las condiciones de ensayo del sistema de condensadores … |
|
2 | … |
|
Documento adjunto 1 a la ficha de características del sistema de condensadores
| Información sobre las condiciones de ensayo (si procede) |
1.1 | … |
«Apéndice 7
(reservado)
«Apéndice 8
Valores normalizados de un sistema de máquina eléctrica
Se realizarán los siguientes pasos para generar los datos de entrada del sistema de máquina eléctrica sobre la base de valores normalizados:
— | Paso 1: el Reglamento n.o 85 de las Naciones Unidas será de aplicación al presente apéndice a menos que se indique lo contrario. |
— | Paso 2: los valores de par máximo en función de la velocidad de giro se determinarán a partir de los datos generados de conformidad con el punto 5.3.1.4 del Reglamento n.o 85 de las Naciones Unidas. Los datos deberán obtenerse de conformidad con el punto 4.3.2 del presente anexo. |
— | Paso 3: los valores de par mínimo en función de la velocidad de giro se determinarán multiplicando los valores de par del paso 2 por menos uno. |
— | Paso 4: el par continuo máximo durante treinta minutos y la correspondiente velocidad de giro se determinarán a partir de los datos generados de conformidad con el punto 5.3.2.3 del Reglamento n.o 85 de las Naciones Unidas como valores medios durante el período de treinta minutos. En caso de que no pueda determinarse ningún valor para el par continuo máximo durante treinta minutos de acuerdo con el Reglamento n.o 85 o de que el valor determinado sea 0 Nm, los datos de entrada aplicables se ajustarán a 0 Nm y la velocidad de giro correspondiente se ajustará a la velocidad nominal determinada a partir de los datos generados con arreglo al paso 2. |
— | Paso 5: las características de sobrecarga se determinarán a partir de los datos generados de acuerdo con el paso 2. El par de sobrecarga y la velocidad de giro correspondiente se calcularán como valores medios en el intervalo de velocidades en el que la potencia sea igual o superior al 90 % de la potencia máxima. La duración de sobrecarga t0_maxP se definirá por la duración total del ensayo realizado de acuerdo con el paso 2 multiplicada por un factor de 0,25. |
— | Paso 6: el mapa de consumo de potencia eléctrica se determinará de conformidad con las disposiciones siguientes:
|
— | Paso 7: la curva de resistencia se calculará sobre la base del mapa de pérdida de potencia real determinado con arreglo a la letra e) de acuerdo con las disposiciones siguientes:
|
— | Paso 8: la inercia giratoria se determinará mediante una de las opciones siguientes:
|
«Apéndice 9
Valores normalizados de los IEPC
A fin de permitir el uso de las disposiciones definidas en el presente apéndice para generar datos de entrada para los IEPC basados total o parcialmente en valores normalizados, deberán cumplirse las condiciones siguientes.
Cuando más de un sistema de máquina eléctrica forme parte del IEPC, todas las máquinas eléctricas tendrán las mismas especificaciones. En ese caso, todos los sistemas de máquina eléctrica se conectarán a la trayectoria de par del IEPC en la misma posición de referencia (es decir, antes de la caja de cambios o después de la caja de cambios) y, en esta posición, todas las máquinas eléctricas deberán funcionar a la misma velocidad de giro y su par (potencia) individual se deberá añadir mediante algún tipo de caja de cambios de suma.
1) | Se utilizará alguna de las siguientes opciones para generar los datos de entrada del IEPC basándose, total o parcialmente, en valores normalizados:
|
2) | Caja de cambios como componente interno del IEPC La pérdida de par Tgbx,l ,in para cada marcha variable hacia delante en relación con el árbol de entrada de las piezas de la caja de cambios del IEPC se calculará de conformidad con las disposiciones siguientes:
|
3) | Diferencial como componente interno del IEPC La pérdida de par Tdiff,l ,in relativa a la entrada de las piezas del diferencial del IEPC se calculará de conformidad con las disposiciones siguientes:
|
«Apéndice 10
Valores normalizados de SAEER
1) | Sistema de baterías o subsistema de baterías representativo Se realizarán los siguientes pasos para generar los datos de entrada del sistema de baterías o del subsistema de baterías representativo sobre la base de valores normalizados:
|
2) | Sistema de condensadores o subsistema de condensadores representativo Se realizarán los siguientes pasos para generar los datos de entrada del sistema de condensadores o del sistema de condensadores representativo sobre la base de valores normalizados:
|
«Apéndice 11
(reservado)
«Apéndice 12
Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
1. Sistemas de máquina eléctrica o IEPC
1.1 | Todo sistema de máquina eléctrica o IEPC estará fabricado de manera que se ajuste al tipo homologado en lo que se refiere a la descripción que figura en el certificado y sus anexos. Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 31 del Reglamento (UE) 2018/858. |
1.2 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se comprobará sobre la base de la descripción que figura en los certificados y los expedientes de homologación adjuntos a estos, tal como se establece en los apéndices 2 y 3 del presente anexo. |
1.3 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se evaluará de acuerdo con las condiciones específicas establecidas en el presente punto. |
1.4 | El fabricante de componentes someterá a ensayo anualmente, como mínimo, el número de unidades indicado en el cuadro 1 sobre la base del número total anual de sistemas de máquina eléctrica o de IEPC que produzca. A efectos de establecer las cifras de producción anual, solo se tendrán en cuenta los sistemas de máquina eléctrica o los IEPC que entren en el ámbito de aplicación de los requisitos del presente Reglamento y para los que no se hayan utilizado valores normalizados. |
1.5 | Para los volúmenes totales de producción anual de hasta 4,000, la elección de la familia con la que se realizarán los ensayos deberá ser acordada entre el fabricante de componentes y la autoridad de homologación. |
1.6 | Para los volúmenes totales de producción anual superiores a 4,000, siempre se someterá a ensayo la familia con el mayor volumen de producción. El fabricante de componentes deberá justificar ante la autoridad de homologación el número de ensayos realizados y la elección de la familia. Las restantes familias con las que deban realizarse ensayos serán acordadas entre el fabricante y la autoridad de homologación. Cuadro 1 Tamaño de la muestra para los ensayos de conformidad
|
1.7. | A efectos de los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, la autoridad de homologación deberá determinar, junto con el fabricante de componentes, los tipos de sistemas de máquina eléctrica o de IEPC que deben ensayarse. La autoridad de homologación deberá asegurarse de que los tipos de sistemas de máquina eléctrica o IEPC seleccionados se fabriquen conforme a las mismas normas que en la producción en serie. |
1.8 | Si el resultado de un ensayo realizado conforme al punto 1.9 es superior al especificado en el punto 1.9.4, deberán ensayarse otras tres unidades de la misma familia. En caso de incumplimiento de alguna de ellas, será de aplicación el artículo 23. |
1.9 | Ensayos de conformidad de la producción de un sistema de máquina eléctrica o un IEPC |
1.9.1 | Condiciones límite Serán de aplicación todas las condiciones límite especificadas en el presente anexo, a menos que se señale lo contrario en el presente punto. La potencia de refrigeración deberá estar dentro de los límites especificados en el presente anexo para los ensayos de certificación. La medición se realizará únicamente para uno de los niveles de tensión indicados en el punto 4.1.3 del presente anexo. El fabricante de componentes elegirá el nivel de tensión para los ensayos. Para los ensayos de conformidad de la producción no será necesario cumplir las especificaciones del equipo de medición definidas de acuerdo con el punto 3.1 del presente anexo. |
1.9.2 | Ronda de ensayo Se medirán dos puntos de consigna diferentes. Tras completar la medición en el primer punto de consigna, el sistema podrá enfriarse de acuerdo con las recomendaciones del fabricante de componentes funcionando en un punto de consigna concreto definido por dicho fabricante. Para el punto de consigna 1, el ensayo de las características de sobrecarga se realizará de conformidad con el punto 4.2.5 del presente anexo. Para el punto de consigna 2, el ensayo de par continuo máximo durante treinta minutos se realizará de conformidad con el punto 4.2.4 del presente anexo. |
1.9.3 | Postratamiento de los resultados Todos los valores de potencia mecánica y eléctrica determinados con arreglo a los puntos 4.2.5.3 y 4.2.4.3 se corregirán en función de la desviación de incertidumbre del equipo de medición de la conformidad de la producción, con arreglo a las disposiciones siguientes:
|
1.9.4 | Evaluación de los resultados A partir de los valores para cada uno de los dos diferentes puntos de consigna determinados con arreglo a los puntos 1.9.2 y 1.9.3, las cifras de eficiencia se determinarán dividiendo la potencia mecánica corregida P*mech por la potencia eléctrica corregida P*el. La eficiencia total durante los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, ηA,CoP, se calculará con el valor de la media aritmética de las dos cifras de eficiencia. El ensayo de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se supera si la diferencia entre ηA,CoP y ηA,TA es inferior al 3 % de la eficiencia homologada de tipo ηA,TA. En el caso de un IEPC que incluya una caja de cambios o un diferencial, el límite para superar el ensayo de conformidad de la producción se eleva del 3 al 4 %. En el caso de un IEPC que incluya tanto una caja de cambios como un diferencial, el límite para superar el ensayo de conformidad de la producción se eleva del 3 al 5 %. La eficiencia homologada de tipo ηA,TA se calculará mediante la media aritmética de las dos cifras de eficiencia determinadas de conformidad con los puntos 4.3.5 y 4.3.6 y documentadas en la ficha de características durante la certificación de los componentes. |
2. IHPC de tipo 1
2.1 | Todo IHPC estará fabricado de manera que se ajuste al tipo homologado en lo que se refiere a la descripción que figura en el certificado y sus anexos. Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 31 del Reglamento (UE) 2018/858. |
2.2 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se comprobará sobre la base de la descripción que figura en los certificados y los expedientes de homologación adjuntos a estos, tal como se establece en el apéndice 4 del presente anexo. |
2.3 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se evaluará con arreglo a las condiciones específicas establecidas en el punto 1 del presente apéndice, cuyas disposiciones definidas para el IEPC en los puntos respectivos serán de aplicación salvo que se indique lo contrario. |
2.4 | No obstante lo dispuesto en el punto 2.3 del presente apéndice, se aplicarán las disposiciones siguientes:
|
3. Sistemas de baterías o subsistemas de baterías representativos
3.1 | Todo sistema de baterías o subsistema de baterías representativo estará fabricado de manera que se ajuste al tipo homologado en lo que se refiere a la descripción que figura en el certificado y sus anexos. Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 31 del Reglamento (UE) 2018/858. |
3.2 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se comprobará sobre la base de la descripción que figura en los certificados y los expedientes de homologación adjuntos a estos, tal como se establece en el apéndice 5 del presente anexo. |
3.3 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se evaluará de acuerdo con las condiciones específicas establecidas en el presente punto. |
3.4 | El fabricante de componentes someterá a ensayo anualmente, como mínimo, el número de unidades indicado en el cuadro 2 sobre la base del número total anual de sistemas de baterías o subsistemas de baterías representativos que produzca. A efectos de establecer las cifras de producción anual, solo se tendrán en cuenta los sistemas de baterías o los subsistemas de baterías representativos que entren en el ámbito de aplicación de los requisitos del presente Reglamento y para los que no se hayan utilizado valores normalizados. Cuadro 2 Tamaño de la muestra para los ensayos de conformidad
|
3.5. | A efectos de los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, la autoridad de homologación deberá determinar, junto con el fabricante de componentes, los tipos de sistemas de baterías o de subsistemas de baterías representativos que deben ensayarse. La autoridad de homologación deberá asegurarse de que los tipos de sistema de baterías o subsistema de baterías representativo seleccionados se fabriquen conforme a las mismas normas que en la producción en serie. |
3.6 | Si el resultado de un ensayo realizado conforme al punto 3.7 es superior al especificado en el punto 3.7.4, deberán ensayarse otras tres unidades del mismo tipo. En caso de incumplimiento de alguna de ellas, será de aplicación el artículo 23. |
3.7 | Ensayos de conformidad de la producción de un sistema de baterías o un subsistema de baterías representativo |
3.7.1 | Condiciones límite Serán de aplicación todas las condiciones límite especificadas en el presente anexo para los ensayos de certificación. |
3.7.2 | Ronda de ensayo Se realizarán dos ensayos diferentes. Para el ensayo 1, el procedimiento de ensayo de la capacidad asignada se realizará de conformidad con el punto 5.4.1 del presente anexo. Para el ensayo 2 se aplicará el procedimiento siguiente:
|
3.7.3 | Postratamiento de los resultados En el caso de los HPBS, la corriente de descarga con un estado de carga del 80 % y la corriente de carga con un estado de carga del 20 % se promediarán a lo largo del período de medición de 20 segundos. En el caso de los HEBS, la corriente de descarga con un estado de carga del 90 % y la corriente de carga con un estado de carga del 20 % se promediarán a lo largo del período de medición de 120 segundos. Se utilizarán números absolutos para ambos valores medios, el de la corriente de descarga y el de corriente de carga. |
3.7.4 | Evaluación de los resultados Se supera el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas cuando se cumplen todos los criterios siguientes:
|
4. Sistemas de condensadores
4.1 | Todo sistema de condensadores estará fabricado de manera que se ajuste al tipo homologado en lo que se refiere a la descripción que figura en el certificado y sus anexos. Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 31 del Reglamento (UE) 2018/858. |
4.2 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se comprobará sobre la base de la descripción que figura en los certificados y los expedientes de homologación adjuntos a estos, tal como se establece en el apéndice 6 del presente anexo. |
4.3 | La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se evaluará de acuerdo con las condiciones específicas establecidas en el presente punto. |
4.4 | El fabricante de componentes someterá a ensayo anualmente, como mínimo, el número de unidades indicado en el cuadro 3 sobre la base del número total anual de sistemas de condensadores que produzca. A efectos de establecer las cifras de producción anual, solo se tendrán en cuenta los sistemas de condensadores que entren en el ámbito de aplicación de los requisitos del presente Reglamento y para los que no se hayan utilizado valores normalizados. Cuadro 3 Tamaño de la muestra para los ensayos de conformidad
|
4.5. | A efectos de los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, la autoridad de homologación deberá determinar, junto con el fabricante de componentes, los tipos de sistemas de condensadores que deben ensayarse. La autoridad de homologación deberá asegurarse de que los tipos de sistemas de condensadores seleccionados se fabriquen conforme a las mismas normas que en la producción en serie. |
4.6 | Si el resultado de un ensayo realizado conforme al punto 4.7 es superior al especificado en el punto 4.7.4, deberán ensayarse otras tres unidades del mismo tipo. En caso de incumplimiento de alguna de ellas, será de aplicación el artículo 23. |
4.7 | Ensayos de conformidad de la producción de los sistemas de condensadores |
4.7.1 | Condiciones límite Serán de aplicación todas las condiciones límite especificadas en el presente anexo para los ensayos de certificación. |
4.7.2 | Ronda de ensayo El procedimiento de ensayo deberá realizarse de conformidad con el punto 6.3 del presente anexo. |
4.7.3 | Postratamiento de los resultados El postratamiento de los resultados deberá realizarse de conformidad con el punto 6.4 del presente anexo. |
4.7.4 | Evaluación de los resultados Se supera el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas cuando se cumplen todos los criterios siguientes:
|
«Apéndice 13
Concepto de familia
1. Sistemas de máquina eléctrica e IEPC
1.1. Generalidades
Una familia de sistemas de máquina eléctrica o de IEPC se caracteriza por unos parámetros de diseño y rendimiento. Tales parámetros deberán ser comunes a todos los miembros de la familia. El fabricante de componentes podrá decidir qué sistemas de máquina eléctrica o IEPC pertenecen a una familia, siempre que se respeten los criterios de pertenencia enumerados en el presente apéndice. La familia en cuestión deberá ser aprobada por la autoridad de homologación. El fabricante de componentes pondrá a disposición de la autoridad de homologación la información adecuada sobre los miembros de la familia.
1.2. Casos particulares
En algunos casos puede producirse una interacción entre los parámetros. Esto se tendrá en cuenta para garantizar que los sistemas de máquina eléctrica o los IEPC de características similares se incluyan en la misma familia. El fabricante de componentes deberá identificar estos casos y notificarlos a la autoridad de homologación. Esto se tendrá entonces en cuenta como criterio para crear una nueva familia de sistemas de máquina eléctrica o de IEPC.
En el caso de dispositivos o características que no estén enumerados en el punto 1.4 y que tengan una gran influencia en el nivel de rendimiento o en el consumo de potencia eléctrica, el fabricante de componentes identificará los respectivos dispositivos o características sobre la base de las buenas prácticas técnicas y estos se notificarán a la autoridad de homologación. Esto se tendrá entonces en cuenta como criterio para crear una nueva familia de sistemas de máquina eléctrica o de IEPC.
1.3. Concepto de familia
El concepto de familia define los criterios y los parámetros que permiten al fabricante de componentes agrupar sistemas de máquina eléctrica o IEPC en familias con datos similares o iguales pertinentes para las emisiones de CO2 o el consumo de energía.
1.4. Disposiciones especiales relativas a la representatividad
La autoridad de homologación podrá concluir que los parámetros de rendimiento y el consumo de potencia eléctrica de una familia de sistemas de máquina eléctrica o de IEPC pueden caracterizarse mejor mediante ensayos adicionales. En este caso, el fabricante de componentes presentará la información adecuada para determinar el sistema de máquina eléctrica o el IEPC dentro de la familia que pueda representar mejor a esta. Sobre la base de esta información, la autoridad de homologación también podrá concluir que es necesario que el fabricante de componentes cree una nueva familia de sistemas de máquina eléctrica o de IEPC integrada por menos miembros para que sea más representativa.
Si los miembros de una familia incorporan otras características que se pueda considerar que afectan a los parámetros de rendimiento o al consumo de potencia eléctrica, estas características también se identificarán y tendrán en cuenta en la selección del miembro de origen.
1.5. Parámetros que definen una familia de sistemas de máquina eléctrica o de IEPC
Además de los parámetros indicados a continuación, el fabricante de componentes podrá introducir criterios adicionales que permitan la definición de familias de tamaño más reducido. No ha de tratarse necesariamente de parámetros que influyan en el nivel de rendimiento o en el consumo de potencia eléctrica.
1.5.1. | Los siguientes criterios serán, en principio, los mismos para todos los miembros de una familia de sistemas de máquina eléctrica o de IEPC:
Los cambios en los componentes mencionados en las letras a) a f) solo son aceptables en la medida en que puedan aportarse argumentos técnicos sólidos para demostrar que el cambio correspondiente no afecta negativamente a los parámetros de rendimiento o al consumo de potencia eléctrica. |
1.5.2. | Los siguientes criterios serán comunes para todos los miembros de una familia de sistemas de máquina eléctrica o de IEPC. Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
1.6. Elección del miembro de origen
El miembro de origen de una familia de sistemas de máquina eléctrica o de IEPC será el miembro con el par máximo global más elevado determinado de conformidad con el punto 4.2.2 del presente anexo.
«Apéndice 14
Marcados y numeración
1. Marcados
En el caso de que se otorgue una homologación de tipo al componente de tren de potencia eléctrico de conformidad con el presente anexo, el componente deberá llevar:
1.1. | El nombre del fabricante o la marca registrada. |
1.2. | La marca y la indicación del tipo identificativo según estén consignados en los puntos 0.2 y 0.3 de los apéndices 2 a 6 del presente anexo. |
1.3. | La marca de certificación (si procede) en forma de rectángulo en torno a la letra minúscula “e” seguida del número distintivo del Estado miembro que ha expedido el certificado:
|
1.4. | En la marca de certificación figurará también, cerca del rectángulo, el «número de certificación de base» incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo IV del Reglamento (UE) 2020/683, precedido de las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de un carácter alfanumérico que indica la pieza para la que se ha expedido el certificado: Para el presente Reglamento, el número secuencial será el 02. Para el presente Reglamento, el carácter alfanumérico será el establecido en el cuadro 1. Cuadro 1
|
1.4.1. | Ejemplos y dimensiones de la marca de certificación
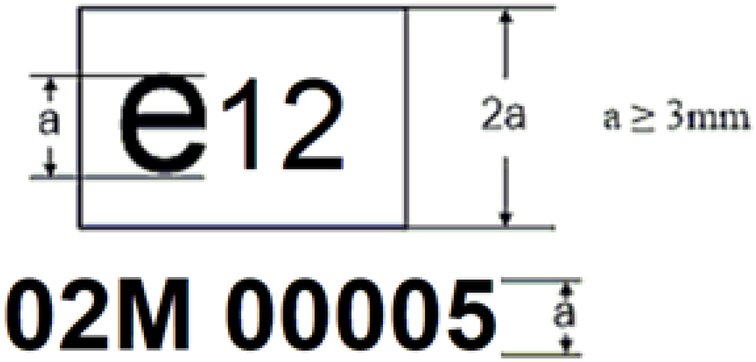
Esta marca de certificación fijada en un componente de tren de potencia eléctrico indica que el tipo de que se trata ha sido homologado en Austria (e12) con arreglo al presente Reglamento. Los dos primeros dígitos (02) indican el número secuencial asignado a la última modificación técnica del presente Reglamento. La letra siguiente indica que el certificado se ha expedido con relación a un sistema de máquina eléctrica (M). Los cinco últimos dígitos (00005) son los que la autoridad de homologación de tipo ha asignado al sistema de máquina eléctrica como número de certificación de base. |
1.5 | A petición del solicitante del certificado y previo acuerdo de la autoridad de homologación de tipo, podrán utilizarse tamaños de fuente distintos de los indicados en el punto 1.4.1. Esos otros tamaños de fuente deberán seguir siendo claramente legibles. |
1.6 | Los marcados, las etiquetas, las placas o los adhesivos deben durar toda la vida útil del componente de tren de potencia eléctrico, y ser claramente legibles e indelebles. El fabricante deberá asegurarse de que sea imposible retirar los marcados, las etiquetas, las placas o los adhesivos sin destruirlos ni desfigurarlos. |
1.7 | La marca de certificación será visible cuando el componente de tren de potencia eléctrico esté instalado en el vehículo y se colocará en una pieza necesaria para el funcionamiento normal que, por lo general, no necesite ser sustituida durante la vida útil del componente. |
2. Numeración:
2.1. | El número de certificación de un componente de tren de potencia eléctrico deberá comprender lo siguiente: eX*YYYY/YYYY*ZZZZ/ZZZZ*X*00000*00
|
«Apéndice 15
Parámetros de entrada de la herramienta de simulación
Introducción
El presente apéndice describe la lista de parámetros que debe proporcionar el fabricante de componentes como información de entrada de la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y ejemplos de datos.
Definiciones
1) | “ID del parámetro”: identificador único utilizado en la herramienta de simulación para un parámetro de entrada o un conjunto de datos de entrada en concreto. |
2) | “Tipo”: tipo de datos del parámetro
|
3) | “Unidad”: unidad física del parámetro |
Conjunto de parámetros de entrada para el sistema de máquina eléctrica
Cuadro 1
Parámetros de entrada “Electric machine system/General”
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
Manufacturer | P450 | token | [-] |
|
Model | P451 | token | [-] |
|
CertificationNumber | P452 | token | [-] |
|
Date | P453 | dateTime | [-] | Fecha y hora de creación del hash del componente |
AppVersion | P454 | token | [-] | Datos específicos del fabricante en relación con las herramientas utilizadas para la evaluación y el tratamiento de los datos medidos del componente |
ElectricMachineType | P455 | string | [-] | Determinado de conformidad con el subpunto 21 del punto 2 del presente anexo. Valores permitidos: “ASM”, “ESM”, “PSM”, “RM” |
CertificationMethod | P456 | string | [-] | Valores permitidos: “Measurement”, “Standard values” |
R85RatedPower | P457 | integer | [W] | Determinado de conformidad con el punto 1.9 del anexo 2 del Reglamento n.o 85, Rev. 1, de las Naciones Unidas |
RotationalInertia | P458 | double, 2 | [kgm2] | Determinado de conformidad con el punto 8 del apéndice 8 del presente anexo. |
DcDcConverterIncluded | P465 | boolean | [-] | Fijado en “true” si el convertidor CC/CC forma parte del sistema de máquina eléctrica conforme al punto 4.1 del presente anexo |
IHPCType | P466 | string | [-] | Valores permitidos: “None”, “IHPC Type 1” |
Cuadro 2
Parámetros de entrada “Electric machine system/VoltageLevels” para cada nivel de tensión medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
VoltageLevel | P467 | integer | [V] | Cuando el parámetro “CertificationMethod” sea “Standard values”, no será necesario aportar ningún dato. |
ContinuousTorque | P459 | double, 2 | [Nm] |
|
TestSpeedContinuousTorque | P460 | double, 2 | [1/min] |
|
OverloadTorque | P461 | double, 2 | [Nm] |
|
TestSpeedOverloadTorque | P462 | double, 2 | [1/min] |
|
OverloadDuration | P463 | double, 2 | [s] |
|
Cuadro 3
Parámetros de entrada “Electric machine system/MaxMinTorque” para cada punto de funcionamiento y para cada nivel de tensión medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P468 | double, 2 | [1/min] |
|
MaxTorque | P469 | double, 2 | [Nm] |
|
MinTorque | P470 | double, 2 | [Nm] |
|
Cuadro 4
Parámetros de entrada “Electric machine system/DragTorque” para cada punto de funcionamiento
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P471 | double, 2 | [1/min] |
|
DragTorque | P472 | double, 2 | [Nm] |
|
Cuadro 5
Parámetros de entrada “Electric machine system/ElectricPowerMap” para cada punto de funcionamiento y para cada nivel de tensión medido
En el caso de un IHPC de tipo 1 (de conformidad con la definición que figura en el punto 2, subpunto 42, del presente anexo), para cada punto de funcionamiento, para cada nivel de tensión medido y para cada marcha hacia delante.
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P473 | double, 2 | [1/min] |
|
Par | P474 | double, 2 | [Nm] |
|
ElectricPower | P475 | double, 2 | [W] |
|
Cuadro 6
Parámetros de entrada “Electric machine system/Conditioning”para cada circuito de refrigeración conectado a un intercambiador de calor externo
Cuando el parámetro “CertificationMethod” sea “Standard values”, no será necesario aportar ningún dato.
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
CoolantTempInlet | P476 | integer | [°C] | Determinado de conformidad con los puntos 4.1.5.1 y 4.3.6 del presente anexo. |
CoolingPower | P477 | integer | [W] | Determinado de conformidad con los puntos 4.1.5.1 y 4.3.6 del presente anexo. |
Conjunto de parámetros de entrada para los IEPC
Cuadro 1
Parámetros de entrada “IEPC/General”
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
Manufacturer | P478 | token | [-] |
|
Model | P479 | token | [-] |
|
CertificationNumber | P480 | token | [-] |
|
Date | P481 | dateTime | [-] | Fecha y hora de creación del hash del componente |
AppVersion | P482 | token | [-] | Datos específicos del fabricante en relación con las herramientas utilizadas para la evaluación y el tratamiento de los datos medidos del componente |
ElectricMachineType | P483 | string | [-] | Determinado de conformidad con el subpunto 21 del punto 2 del presente anexo. Valores permitidos: “ASM”, “ESM”, “PSM”, “RM” |
CertificationMethod | P484 | string | [-] | Valores permitidos: “Measured for complete component”, “Measured for EM and standard values for other components”, “Standard values for all components” |
R85RatedPower | P485 | integer | [W] | Determinado de conformidad con el punto 1.9 del anexo 2 del Reglamento n.o 85 de las Naciones Unidas |
RotationalInertia | P486 | double, 2 | [kgm2] | Determinado de conformidad con el punto 8 del apéndice 8 del presente anexo. |
DifferentialIncluded | P493 | boolean | [-] | Fijado como “true” en caso de que un diferencial forme parte del IEPC |
DesignTypeWheelMotor | P494 | boolean | [-] | Fijado como “true” en el caso de diseño de IEPC de tipo motor en rueda |
NrOf DesignTypeWheelMotorMeasured | P495 | integer | [-] | Dato pertinente únicamente en el caso de un diseño de IEPC de tipo motor en rueda, de conformidad con el punto 4.1.1.2 del presente anexo. Valores permitidos: “1”, “2” |
Cuadro 2
Parámetros de entrada “IEPC/Gears” para cada marcha hacia delante
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
GearNumber | P496 | integer | [-] |
|
Ratio | P497 | double, 3 | [-] | Relación entre la velocidad del rotor de la máquina eléctrica y la velocidad del árbol de salida del IEPC |
MaxOutputShaftTorque | P498 | integer | [Nm] | Opcional |
MaxOutputShaftSpeed | P499 | integer | [1/min] | Opcional |
Cuadro 3
Parámetros de entrada “IEPC/VoltageLevels” para cada nivel de tensión medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
VoltageLevel | P500 | integer | [V] | Cuando el parámetro “CertificationMethod” sea “Standard values for all components”, no será necesario aportar ningún dato. |
ContinuousTorque | P487 | double, 2 | [Nm] |
|
TestSpeedContinuousTorque | P488 | double, 2 | [1/min] |
|
OverloadTorque | P489 | double, 2 | [Nm] |
|
TestSpeedOverloadTorque | P490 | double, 2 | [1/min] |
|
OverloadDuration | P491 | double, 2 | [s] |
|
Cuadro 4
Parámetros de entrada “IEPC/MaxMinTorque” para cada punto de funcionamiento y para cada nivel de tensión medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P501 | double, 2 | [1/min] |
|
MaxTorque | P502 | double, 2 | [Nm] |
|
MinTorque | P503 | double, 2 | [Nm] |
|
Cuadro 5
Parámetros de entrada «IEPC/DragTorque» para cada punto de funcionamiento y para cada marcha hacia delante medida (medición opcional en función de la marcha de conformidad con el punto 4.2.3)
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P504 | double, 2 | [1/min] |
|
DragTorque | P505 | double, 2 | [Nm] |
|
Cuadro 6
Parámetros de entrada “IEPC/ElectricPowerMap” para cada punto de funcionamiento, para cada nivel de tensión medido y para cada marcha hacia delante
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
OutputShaftSpeed | P506 | double, 2 | [1/min] |
|
Par | P507 | double, 2 | [Nm] |
|
ElectricPower | P508 | double, 2 | [W] |
|
Cuadro 7
Parámetros de entrada “IEPC/Conditioning”para cada circuito de refrigeración conectado a un intercambiador de calor externo
Cuando el parámetro “CertificationMethod” sea “Standard values for all components”, no será necesario aportar ningún dato.
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
CoolantTempInlet | P509 | integer | [°C] | Determinado de conformidad con los puntos 4.1.5.1 y 4.3.6 del presente anexo. |
CoolingPower | P510 | integer | [W] | Determinado de conformidad con los puntos 4.1.5.1 y 4.3.6 del presente anexo. |
Conjunto de parámetros de entrada para el sistema de baterías
Cuadro 1
Parámetros de entrada “Battery system/General”
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
Manufacturer | P511 | token | [-] |
|
Model | P512 | token | [-] |
|
CertificationNumber | P513 | token | [-] |
|
Date | P514 | dateTime | [-] | Fecha y hora de creación del hash del componente |
AppVersion | P515 | token | [-] | Datos específicos del fabricante en relación con las herramientas utilizadas para la evaluación y el tratamiento de los datos medidos del componente |
CertificationMethod | P517 | string | [-] | Valores permitidos: “Measured”, “Standard values” |
BatteryType | P518 | string | [-] | Valores permitidos: “HPBS”, “HEBS” |
RatedCapacity | P519 | double, 2 | [Ah] |
|
ConnectorsSubsystemsIncluded | P520 | boolean | [-] | Solo pertinente si se somete a ensayo un subsistema de baterías representativo: fijado en “true” si en el ensayo se ha incluido un arnés de cableado representativo para conectar subsistemas de baterías. Siempre fijado en “true” si se ha sometido a ensayo el sistema de baterías completo. |
JunctionboxIncluded | P511 | boolean | [-] | Solo pertinente si se somete a ensayo un subsistema de baterías representativo: fijado en “true” si en el ensayo se ha incluido una caja de conexión representativa con dispositivo de cierre y fusibles. Siempre fijado en “true” si se ha sometido a ensayo el sistema de baterías completo. |
TestingTemperature | P521 | integer | [°C] | Determinado de conformidad con el punto 5.1.4 del presente anexo. Cuando el parámetro “CertificationMethod” sea “Standard values”, no será necesario aportar ningún dato. |
Cuadro 2
Parámetros de entrada “Battery system/OCV” para cada estado de carga medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
SOC | P522 | integer | [%] |
|
OCV | P523 | double, 2 | [V] |
|
Cuadro 3
Parámetros de entrada “Battery system/DCIR” para cada estado de carga medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
SOC | P524 | integer | [%] | Cuando el parámetro “CertificationMethod” sea “Standard values”, se facilitarán los mismos valores de DCIR para dos valores de estado de carga diferentes, de 0 % y 100 %. |
DCIR RI2 | P525 | double, 2 | [mOhm] | Cuando el parámetro «CertificationMethod» sea “Standard values”, se facilitará el valor de DCIR determinado de conformidad con el punto 1, letra d), del apéndice 10. |
DCIR RI10 | P526 | double, 2 | [mOhm] | Cuando el parámetro «CertificationMethod» sea “Standard values”, se facilitará el valor de DCIR determinado de conformidad con el punto 1, letra d), del apéndice 10. |
DCIR RI20 | P527 | double, 2 | [mOhm] | Cuando el parámetro «CertificationMethod» sea “Standard values”, se facilitará el valor de DCIR determinado de conformidad con el punto 1, letra d), del apéndice 10. |
DCIR RI120 | P528 | double, 2 | [mOhm] | Opcional, solo se exige para las baterías de tipo HEBS. En el caso de que el parámetro «CertificationMethod» sea “Standard values”, se facilitará el valor de DCIR determinado de conformidad con el punto 1, letra d), del apéndice 10. |
Cuadro 4
Parámetros de entrada “Battery system/Current limits” para cada estado de carga medido
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
SOC | P529 | integer | [%] | Cuando el parámetro “CertificationMethod” sea “standard values”, se facilitarán los mismos valores tanto de MaxChargingCurrent como de MaxDischargingCurrent para dos valores de estado de carga diferentes, de 0 % y 100 %. |
MaxChargingCurrent | P530 | double, 2 | [A] |
|
MaxDischargingCurrent | P531 | double, 2 | [A] |
|
Conjunto de parámetros de entrada para el sistema de condensadores
Cuadro 1
Parámetros de entrada “Capacitor system/General”
Nombre del parámetro | ID del parámetro | Tipo | Unidad | Descripción/Referencia |
Manufacturer | P532 | Token | [-] |
|
Model | P533 | Token | [-] |
|
CertificationNumber | P534 | Token | [-] |
|
Date | P535 | dateTime | [-] | Fecha y hora de creación del hash del componente |
AppVersion | P536 | Token | [-] | Datos específicos del fabricante en relación con las herramientas utilizadas para la evaluación y el tratamiento de los datos medidos del componente |
CertificationMethod | P538 | String | [-] | Valores permitidos: “Measurement”, “Standard values” |
Capacitance | P539 | double, 2 | [F] |
|
InternalResistance | P540 | double, 2 | [Ohm] |
|
MinVoltage | P541 | double, 2 | [V] |
|
MaxVoltage | P542 | double, 2 | [V] |
|
MaxChargingCurrent | P543 | double, 2 | [A] |
|
MaxDischargingCurrent | P544 | double, 2 | [A] |
|
TestingTemperature | P532 | integer | [°C] | Determinado de conformidad con el punto 6.1.3 del presente anexo. Cuando el parámetro “CertificationMethod” sea “Standard values”, no será necesario aportar ningún dato. |
(*) | Determinado conforme a los puntos 4.3.5 y 4.3.6 del presente anexo |
(**) | Determinado conforme al punto 5.4.1.4 del presente anexo |
(***) | Reglamento n.o 100 de la Comisión Económica de las Naciones Unidas para Europa (CEPE/ONU) — Disposiciones uniformes relativas a la homologación de vehículos en relación con los requisitos específicos del grupo motopropulsor eléctrico (DO L 449 de 15.12.2021, p. 1). |
(1) Por “exactitud” se entiende el valor absoluto de la desviación de la lectura del analizador con respecto a un valor de referencia establecido conforme a una norma nacional o internacional.
(2) El valor de “calibración máxima” será el valor máximo previsto para el sistema de medición respectivo que se espera obtener durante un ensayo específico realizado de conformidad con el presente anexo multiplicado por un factor de 1,1.
(3) determinadas conforme a los puntos 4.3.5 y 4.3.6 del presente anexo
(*1) El ensayo de conformidad de la producción se realizará en el primer año
(*2) El ensayo de conformidad de la producción se realizará en el primer año
(*3) El ensayo de conformidad de la producción se realizará en el primer año
Agencia Estatal Boletín Oficial del Estado
Avda. de Manoteras, 54 - 28050 Madrid